Методы наведения по фиксированным траекториям
По фиксированным траекториям могут двигаться, например, атмосферные самолеты-снаряды класса «Поверхность- Поверхность», если заранее известны координаты цели. К такому типу траекторий можно отнести и баллистические траектории. За исключением их активного участка, когда работает реактивный двигатель, они представляют собой траекторию брошенного тела.
I. На рисунке 3.6 приведена фиксированная траектория снаряда класса «Поверхность- Поверхность».
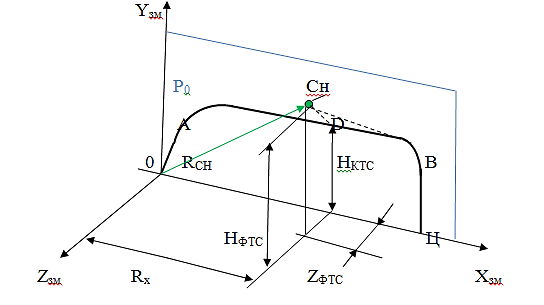
Рисунок 3.6 – Геометрические соотношения при наведении по фиксированной траектории
На рисунке 3.6 можно выделить следующие характерные участки фиксированной кинематической траектории: 0А- набор высоты; АВ – сближение с целью; ВЦ – пикирование. Вертикальная плоскость Р0 проходит через точки 0 (точка старта) и Ц (местоположение цели).
Простейший метод управления подобными снарядами сводится к совмещению центра масс снаряда с кинематической траекторией снаряда (КТС), т.е. в процессе полета необходимо выполнение следующих равенств
 , (3.18)
, (3.18)
 , (3.19)
, (3.19)
где  ,
,  - координаты точек, лежащих на фиксированной кинематической траектории (высота
- координаты точек, лежащих на фиксированной кинематической траектории (высота  , боковое отклонение
, боковое отклонение  );
);  ,
,  - фактические координаты снаряда.
- фактические координаты снаряда.
Кроме того, следует контролировать пройденную дальность  , что необходимо для определения точки В, соответствующей переходу в режим пикирования на цель.
, что необходимо для определения точки В, соответствующей переходу в режим пикирования на цель.
Сигналы рассогласования по высоте и боковому отклонению запишутся следующим образом:
 ,
,  . (3.20)
. (3.20)
Таким образом, для наведения по рассматриваемой фиксированной траектории необходимо наличие каналов измерения высоты и бокового отклонения. Сигналы рассогласования по указанным каналам могут быть сформированы с помощью радиовысотомера и системы бокового управления [3].
Наведение снаряда по фиксированной траектории имеет существенные недостатки. При полете снаряда, особенно на большие расстояния, условия на трассе полета могут существенно изменяться, и предусмотреть реальную обстановку заранее практически невозможно. К числу таких условий следует отнести: ветровые потоки и их распределение по высотам на различных участках трассы; при полете на малых высотах – организованные противником препятствия в виде аэростатов, средств ПВО противника и т.д. Поэтому может оказаться наобходимым маневр снаряда как в вертикальной плоскости (по высоте), так и в горизонтальной плоскости (по курсу). Для осуществления подобных маневров на борту снаряда необходимо иметь данные об условиях полета и в соответствии с этим производить маневрирование. Если координаты цели и снаряда известны, то после отклонения (например, при ветре) может быть рассчитана новая траектория, движение по которой в данных условиях является наиболее целесообразным. При отклонении снаряда по высоте в точке Сн (см. рисунок) движение в точку В может происходить либо по новой траектории - прямой СнВ, либо с возвратом к фиксированной траектории, по ломаной линии СнDB. Траектория СнВ во многих случаях будет предпочтительнее.
Используются также такие методы наведения снарядов, когда их движение в одной плоскости происходит по фиксированной траектории, а в другой – по нефиксированной. Например, при наведении на морские цели полет снаряда может происходить на постоянной высоте над уровнем моря. При этом фиксируется траектория в вертикальной плоскости, а положение этой плоскости по азимуту зависит от местоположения и характера движения цели.
II. Теперь остановимся на правилах построения баллистических траекторий. Траектории баллистических ракет (БР), искусственных спутников Земли и космических аппаратов (КА) состоят из активных и пассивных участков. Мы остановимся пока только на траектории БР [8].
Баллистическая ракета представляет собой бескрылое сигарообразное тело, в передней заостренной части которого размещается переносимый ракетой полезный груз. У боевых ракет это обычно взрывчатое вещество, атомный или термоядерный заряд, у исследовательских баллистических ракет — приборы или живые существа в соответствующих контейнерах или скафандрах.
Позади полезного груза располагаются приборы управления полетом ракеты, баки с топливом и двигательная установка.

|
Рисунок 3.7- Ракета РС-20А (SS-18) и ее параметры
Внешними органами ее стабилизации и управления полетом является оперение, как у современного самолета, с аэродинамическими рулями и так называемыми газовыми рулями, помещаемыми в струе вытекающих из двигателя ракеты нагретых до высокой температуры газов. С помощью газовых рулей ракета может управляться в безвоздушном пространстве. В некоторых конструкциях баллистических ракет вместо газовых рулей и воздушных стабилизаторов используют наклоны двигателя на небольшой угол (5 — 7°) относительно продольной оси ракеты. При этом линия действия реактивной силы не проходит через центр тяжести ракеты, в результате чего создается некоторый момент, поворачивающий ракету в желаемом направлении относительно ее центра тяжести.

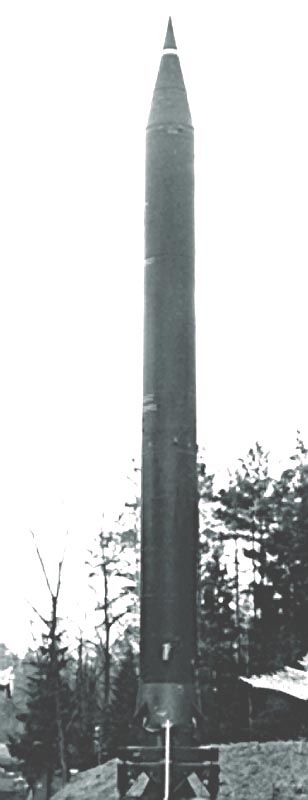
Рисунок 3.8 - Межконтинентальная баллистическаяракета
"Тополь" РТ-2ПМ
На активных участках траектории БР (отрезки ABCG и B΄C΄G΄на рисунке 3.9) ракета приводится в движение силой тяги своих двигателей. В граничных точках G и G΄ происходит выключение двигателей, и дальнейшие участки траектории (GB΄E или GB΄ и G΄E΄) называются пассивными, поскольку на этих участках головная часть ракеты движется по инерции под влиянием только сил тяготения Земли. Активный участок ABCG является пусковым. В процессе движения по инерции возможно кратковременное включение специальной двигательной установки (участок B΄C΄G΄) для необходимой коррекции пассивной траектории движения.
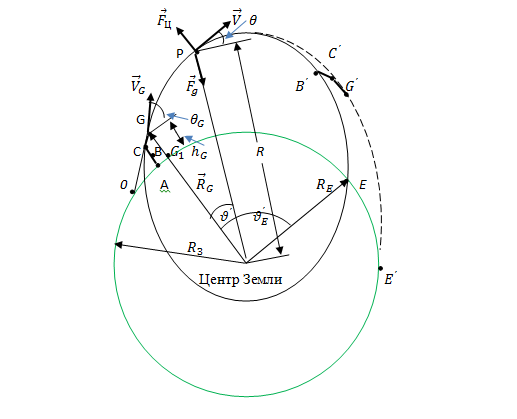
Рисунок 3.9 – Активные и пассивные участки траектории
баллистических ракет
Пусковой активный участок траектории, в свою очередь, делится на три характерных отрезка. Вертикальный стартовый участок АВ необходим для придания ракете такой скорости движения, которая достаточна для удовлетворительного управления ее движением. Кроме того, вертикальный запуск значительно упрощает конструкцию стартовой установки и снижает требования к поперечной жесткости ракеты. На участке выведения ВС ракете сообщается заданное направление движения в вертикальной и горизонтальной плоскостях. На участке выключения СG ракета летит прямолинейно и в процессе ускоренного движения приобретает требуемую начальную скорость движения  .
.
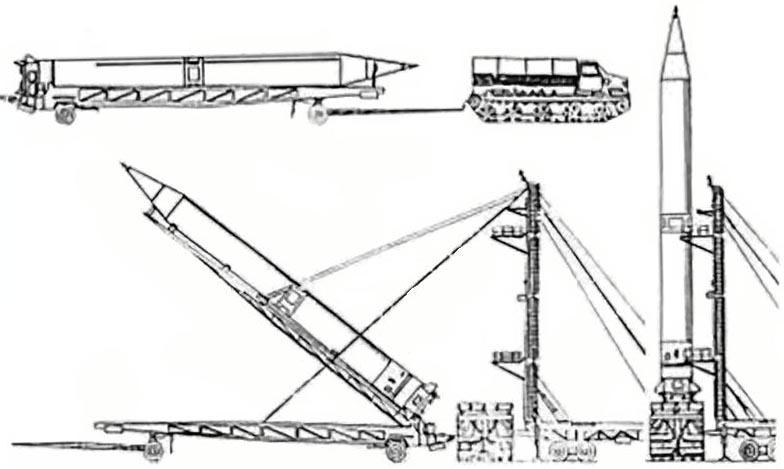
Рисунок 3.10 – Схема установки баллистической ракеты
Р-12 на пусковой стол.
Ниже на рисунке 3.11 показано расположение ракеты в пусковой шахте и на пусковом столе.
Протяженность активных участков траектории БР весьма мала по сравнению с протяженностью пассивных участков. Если учитывать только силу земного притяжения и пренебречь влиянием атмосферы, то каждый из пассивных участков траектории (например, GB΄E) однозначно определяется, во-первых, координатами граничной точки G и, во-вторых, вектором скорости ракеты  в этой точке. Азимутальный угол
в этой точке. Азимутальный угол  проекции вектора
проекции вектора
скорости определяет наклон плоскости орбиты к плоскости экватора, а величина скорости , угол запуска  и высота точки G над поверхностью Земли
и высота точки G над поверхностью Земли  - форму траектории в этой плоскости.
- форму траектории в этой плоскости.
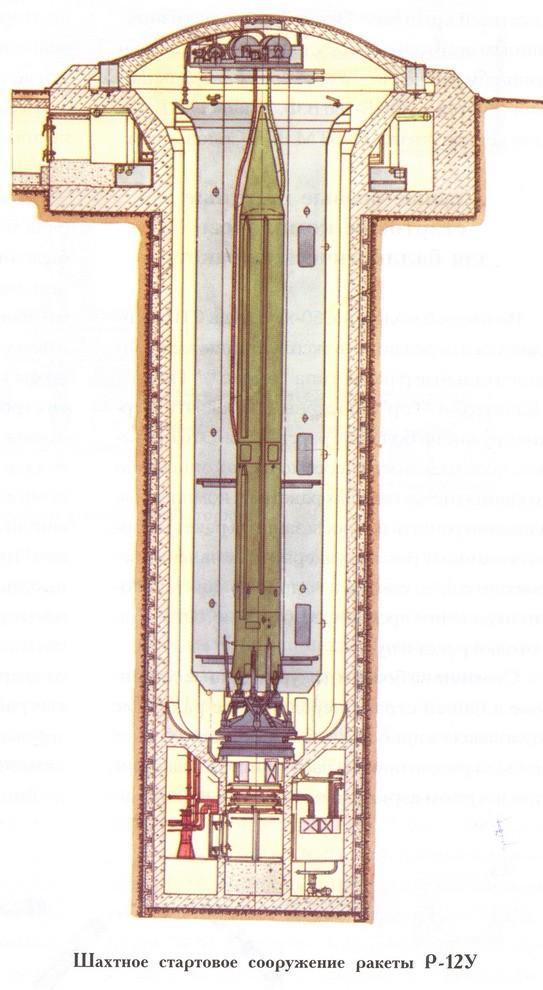
а) б)
Рисунок 3.11 – Ракета а) в пусковой шахте; б) на пусковом столе
Движение БР совершается в плоскости, проходящей через вектор скорости  и центр Земли. Это объясняется тем, что все силы, действующие на объект, лежат в этой плоскости и, следовательно, не способны вывести из нее объект, двигающийся по инерции. Сила земного притяжения
и центр Земли. Это объясняется тем, что все силы, действующие на объект, лежат в этой плоскости и, следовательно, не способны вывести из нее объект, двигающийся по инерции. Сила земного притяжения  , направленная к центру Земли (рис. 3.9), способна лишь изменить направление вектора скорости в этой плоскости и его величину. Вследствие этого движение объекта становится криволинейным и появляется центробежная сила
, направленная к центру Земли (рис. 3.9), способна лишь изменить направление вектора скорости в этой плоскости и его величину. Вследствие этого движение объекта становится криволинейным и появляется центробежная сила  . Соотношение между силами и
. Соотношение между силами и  и определяет характер дальнейшего движения.
и определяет характер дальнейшего движения.

Рисунок 3.12 – Запуск баллистической ракеты с подводной лодки
На нисходящем участке траектории скорость полета ракеты за счет потери высоты постепенно увеличивается. При дальнейшем снижении плотные слои атмосферы ракета проходит с огромными скоростями. При этом происходит сильный разогрев обшивки баллистической ракеты, и если не будут приняты необходимые предохранительные меры, то может произойти ее разрушение или даже взрыв боевой части.
Можно показать, что кривизна траектории в точке P, а следовательно, и форма траектории зависят от параметра u, представляющего собой удвоенное отношение кинетической и потенциальной энергий объекта в точке P.
Пассивную траекторию можно найти, интегрируя уравнения движения материальной точки с массой m в поле сил  земного притяжения. Уравнение пассивного участка траектории в полярных координатах (R,
земного притяжения. Уравнение пассивного участка траектории в полярных координатах (R,  ), за начало которых принят центр Земли и положение радиуса-вектора
), за начало которых принят центр Земли и положение радиуса-вектора  граничной точки G, имеет вид
граничной точки G, имеет вид
 , (3.21)
, (3.21)
где  , a
, a  - радиус Земли,
- радиус Земли,  - удвоенное отношение кинетической и потенциальной энергий,
- удвоенное отношение кинетической и потенциальной энергий,  ,
,  - гравитационная постоянная,
- гравитационная постоянная,  - масса БР.
- масса БР.
В зависимости от начальных условий движения пассивный участок траектории может представлять собой эллипс, параболу или гиперболу [8].
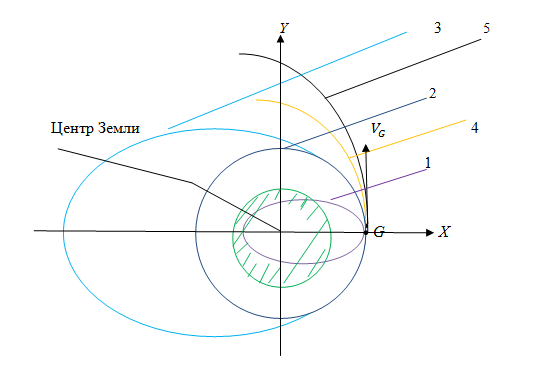
Рисунок 3.13 – Формы траекторий БР, ИСЗ и КА
На рисунке 3.13 показан вариант наведения, когда угол запуска в граничной точке G равен нулю. При  , т.е. при начальной скорости
, т.е. при начальной скорости  , называемой первой космической скоростью, пассивная траектория представляет собой окружность (орбита 2 на рисунке 3.13). При
, называемой первой космической скоростью, пассивная траектория представляет собой окружность (орбита 2 на рисунке 3.13). При  и
и  баллистический объект имеет эллиптические траектории (траектории 1 и 3 на рисунке). При
баллистический объект имеет эллиптические траектории (траектории 1 и 3 на рисунке). При  , т.е. при второй космической скорости
, т.е. при второй космической скорости  траектория становится параболой (траектория 4). При
траектория становится параболой (траектория 4). При  траектория также не замкнута и соответствует гиперболе (траектория 5 на рисунке 3.13).
траектория также не замкнута и соответствует гиперболе (траектория 5 на рисунке 3.13).
Задачей управления на пусковом участке является вывод БР в расчетную точку G с заданной скоростью  . Следовательно, для попадания БР в цель (точка Е на рисунке 3.9) в общем случае должны быть заданы 6 параметров: три пространственные координаты точки G и три величины, характеризующие вектор :
. Следовательно, для попадания БР в цель (точка Е на рисунке 3.9) в общем случае должны быть заданы 6 параметров: три пространственные координаты точки G и три величины, характеризующие вектор :  .
.
Контролирование программы запуска и управление движением БР значительно упрощается при размещении радиотехнических систем (РТС) контроля в точке 0, левее точки А (на рисунке 3.9 точка 0 находится на продолжении линии СG), где пересекаются горизонтальная плоскость и расчетные плоскости выведения – вертикальная и наклонная. Тогда координатами точки G являются  и дальность
и дальность  от точки 0 до точки G, а общее число контролируемых параметров сокращается до четырех:
от точки 0 до точки G, а общее число контролируемых параметров сокращается до четырех:  ,
,  . В точке 0 располагаются угломерная система, дальномерная система и доплеровская РТС. Угломерная часть РТС контроля представляет равносигнальный радиомаяк, сигналы которого излучаются из точки 0 по двум взаимно перпендикулярным парам лепестков диаграммы направленности антенны в вертикальной и наклонной расчетной плоскости. Равносигнальная ось совпадает с направлением ОСG . Данные о текущей дальности до БР и скорости ее движения поступают в наземный ПУ, где формируются командные сигналы для регулирования тяги двигателей БР.
. В точке 0 располагаются угломерная система, дальномерная система и доплеровская РТС. Угломерная часть РТС контроля представляет равносигнальный радиомаяк, сигналы которого излучаются из точки 0 по двум взаимно перпендикулярным парам лепестков диаграммы направленности антенны в вертикальной и наклонной расчетной плоскости. Равносигнальная ось совпадает с направлением ОСG . Данные о текущей дальности до БР и скорости ее движения поступают в наземный ПУ, где формируются командные сигналы для регулирования тяги двигателей БР.
При оптимальных углах запуска необходимо измерять в точке 0 лишь текущую дальность и скорость БР, а для нахождения скорости в упрежденной точке – производить расчет величины ускорения по результатам непрерывного слежения. Этих данных достаточно, чтобы определить такой момент времени выключения двигателей БР, при котором систематическая ошибка по дальности будет равна нулю. Обычно команда на уменьшение тяги двигателей выдается в два приема. В начальной части участка выключения ракета движется с ускорением 60-80 м/сек2. После достижения скорости, близкой к расчетной, дается команда на резкое уменьшение тяги двигателей, и дальнейшее движение происходит с небольшим ускорением, что повышает точность определения момента полной отсечки двигателей.
При запуске глобальных БР[2] точка расположения РТС контроля не может находиться на продолжении линии СG. В этом случае РТС контроля в режиме непрерывного слежения измеряет три пространственных координаты ракеты и три производные этих координат. В расчетной точке выключения двигателя все эти шесть параметров должны быть равны номинальным значениям, иначе будут траекторные ошибки [8].
Дата добавления: 2017-09-01; просмотров: 2868;
Поиск по сайту
Узнать еще
- I. История открытия и методы исследования вирусов
- II. Категории и методы политологии.
- III. Методы искусственной физико-химической детоксикации.
- Абсолютный возраст горных пород и методы его определения
- Автоматические методы изготовления фотошаблонов.
- Агротехнические методы (приемы) обработки почвы.
- Административные методы управления природопользованием
- АКТИВНЫЕ МЕТОДЫ ПРОФКОНСУЛЬТАЦИЙ И ПРОФОРИЕНТАЦИОННЫЕ ИГРЫ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
