Избыточная поворачиваемость
При избыточной поворачиваемости автомобиля (занос задней оси) состояние автомобиля должно корректироваться путём изменения направления вращения рулевого колеса. Справиться с этим явлением сложнее, чем с недостаточной поворачиваемостью.
Система ESC стабилизирует автомобиль тоже в два этапа:
1. Благодаря подтормаживанию колеса, движущегося по внешнему радиусу поворота, возникает стабилизирующий момент относительно центра тяжести автомобиля, который доворачивает автомобиль в направлении, задаваемом рулевым колесом.
2. Если этого вмешательства недостаточно, модуль ESC передаёт блоку управления двигателя команду кратковременно увеличить подачу топлива (это происходит в очень редких случаях).
Манёвр объезда препятствия. Безопасное выполнение этого манёвра было основной причиной разработки системы ESC. Автомобиль, не оборудованный системой ESC, должен уклоняться от внезапно возникшего препятствия так, как это показано на рисунке 24. Водитель поворачивает рулевое колесо влево и сразу же после этого вправо.
Рисунок 24 - Манёвр объезда препятствия, состоящий из участков с недостаточной и избыточной поворачиваемостью.
Автомобиль начинает раскачиваться, и заднюю часть автомобиля выносит в сторону. Водитель с трудом может остановить вращение автомобиля, и он может сорваться в неконтролируемый занос.
Автомобиль с системой ESC. Водитель выполняет манёвр объезда препятствия так же, как и в предыдущем случае. Система ESC поддерживает действия водителя в следующей последовательности:
1. Во время первого поворота рулевого колеса влево автомобиль имеет недостаточную поворачиваемость. Путём уменьшения крутящего момента двигателя и подтормаживания заднего колеса, движущегося по внутреннему радиусу поворота, недостаточная поворачиваемость уменьшается до минимума.
2. Во время последующего поворота рулевого колеса вправо направление движения автомобиля поддерживается за счёт увеличения момента привода на передних колёсах, чтобы таким образом ускорить изменение направления движения.
3. При возвращении на правую полосу движения водитель поворачивает передние колёса влево и реакция автомобиля поддерживается дополнительным моментом привода на переднем левом колесе.
Приведенное описание сильно упрощено. Во время реального манёвра объезда препятствия недостаточная поворачиваемость автомобиля сменяется избыточной поворачиваемостью очень быстро. В этом случае недостаточная и избыточная поворачиваемость корректируется модулем ESC. Описать все состояния, в которых находится автомобиль при совершении манёвра объезда препятствия сложно. Кроме того, каждый автомобиль имеет другие ходовые качества и реагирует иначе.
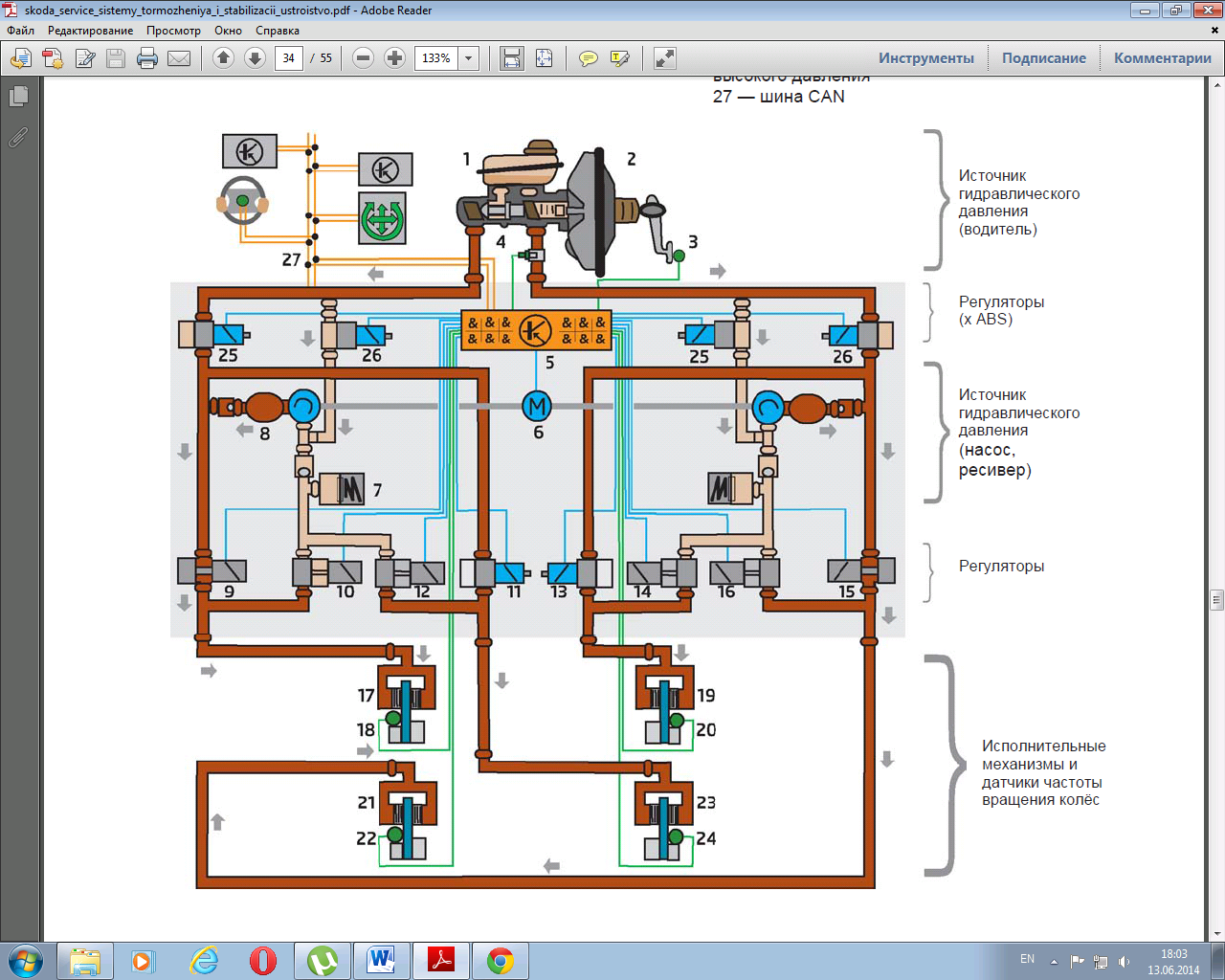
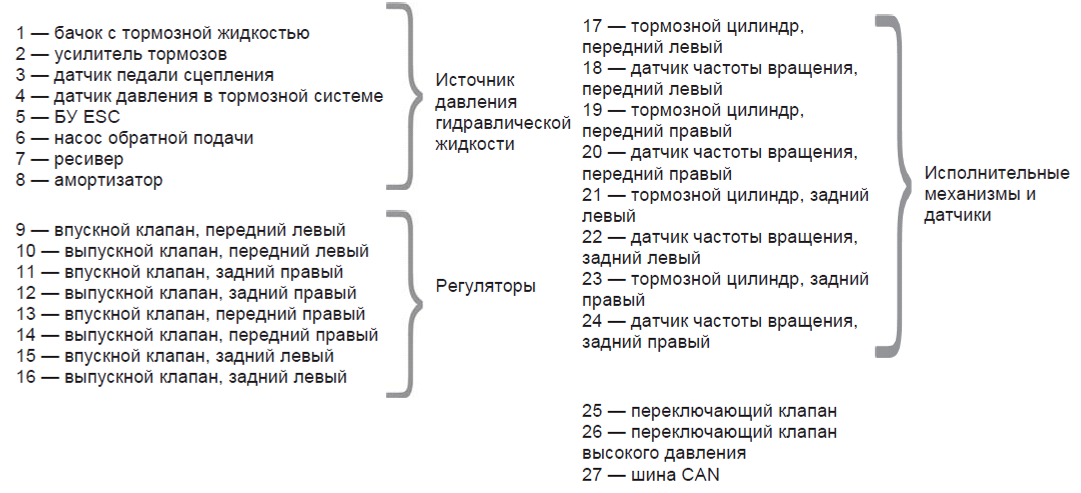
Рисунок 25 – Гидравлическая схема системы ESC
Дата добавления: 2017-09-01; просмотров: 1509;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
