Гидропривод с объемным регулированием
Преимущества гидропривода с объемным регулированием. В гидроприводах большой мощности, в которых энергетические показатели играют важную роль, применяют объемный способ регулирования скорости. КПД гидроприводов с объемным регулированием, определяемый соотношением η=ηнηДηг, (где ηн — КПД насоса; ηД — КПД гидродвигателя; ηг — гидравлический КПД гидролинии) существенно выше, чем в гидроприводах с дроссельным регулированием. Величина КПД для гидроприводов с замкнутой циркуляцией достигает 0,65—0,7, а для гидроприводов с разомкнутой циркуляцией доходит до 0,75.
Нагрев рабочей жидкости в гидроприводах с объемным регулированием значительно меньше, чем при дроссельном регулировании, благодаря отсутствию дросселирования потока. При таком способе регулирования обеспечивается более плавное реверсирование и торможение гидродвигателя, чем при распределении потока с помощью гидрораспределителей. В гидроприводах с дроссельным регулированием реверс потока, как правило, вызывает в трубопроводах явление гидравлического удара. Диапазон регулирования скорости при объемном способе регулирования  во много раз выше, чем при дроссельном регулировании.
во много раз выше, чем при дроссельном регулировании.
Благодаря перечисленным преимуществам гидроприводы с объемным регулированием применяются во всех отраслях машиностроения в качестве приводов средней и большой мощности. Особенно широко применяют их в горных, сельскохозяйственных, подъемно-транспортных и дорожно-строительных машинах. Объемное регулирование скорости выходного звена гидропривода достигается изменением рабочего объема: насоса, гидродвигателя, насоса и гидродвигателя.
Регулирование с помощью изменения рабочего объема насоса. Регулирование с помощью изменения рабочего объема насоса может быть использовано в гидроприводах поступательного, поворотного и вращательного движений.
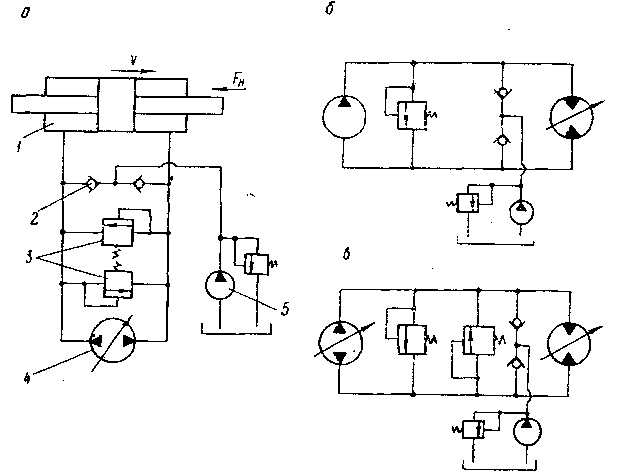
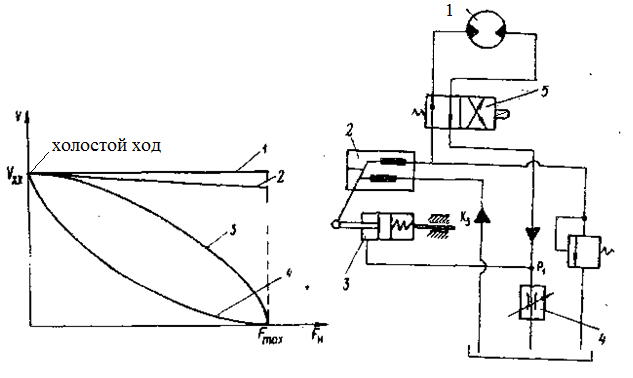
Рисунок 3.8 – Объемное регулирование:
а – подачей насоса; б – изменением рабочего объема; в – изменением рабочих объемов насоса и гидромотора
На рис. 3.8,а приведена принципиальная схема гидропривода поступательного движения с замкнутой циркуляцией, в котором регулирование скорости движения штока гидроцилиндра 1 осуществляется за счет изменения подачи насоса 4. Выражение для скорости движения штока v при  записывается в виде
записывается в виде
где qн — рабочий объем насоса; nн — частота вращения насоса; S — эффективная площадь поршня гидроцилиндра; ηс — коэффициент объемных потерь системы, определяемый изменением объемными КПД насоса и гидродвигателя в функции давления (нагрузки); Fн —нагрузка на штоке; рк— давление, на которое отрегулированы предохранительные клапаны 3.
Изменение направления движения выходного звена гидропривода осуществляется благодаря реверсированию потока рабочей жидкости, подаваемой насосом (реверс подачи насоса). При этом необходимо вначале уменьшить подачу насоса до нуля, а затем увеличить ее, но в противоположном направлении. Напорная и сливная гидролинии меняются местами. Для компенсации утечек и температурных изменений объема жидкости в гидроприводе с замкнутой циркуляцией, а также для исключения возможности кавитации на входе в насос используется вспомогательный насос 5, осуществляющий подачу рабочей жидкости в систему гидропривода через обратные клапаны 2.
При таком способе регулирования усилие Fн, гидроцилиндром, не зависит от скорости его движения, v. В этом случае диапазон регулирования определяется объемным КПД гидропривода, а также величиной максимальной подачи насоса, определяемой его рабочим объемом.
Промышленностью серийно выпускается гидропривод вращательного движения типа 11Д-Н с объемным регулированием путем изменения рабочего объема насоса. Технические характеристики гидроприводов этого типа приведены в табл. 3.3 [2].
Таблица 3.3 – Технические характеристики гидроприводов 11Д-Н
| Параметр | Номер гидропривода | |||||
| 0,5 | 1,5 | 2,5 | ||||
| Скорость вращения приводного вала, об/мин | ||||||
| Максимальная скорость вращения, выходного вала, об/мин | ±2950 | ±2950 | ±2950 | ±1440 | ±1440 | ±1440 |
| Номинальный крутящий момент на выходном валу, Н-м | 3,3 | 17,5 | ||||
| Минимальное время разгона выходного вала от 0 до максимума, с | 0,1 | 1 0,12 | 0,15 | 0,2 | 0,3 | 0,35 |
Примечания: 1. Диапазон регулирования скорости равен 1000. 2. номера гидроприводов 0,5; 1,5; 2,5 обозначают максимальный момент на выходном валу (кгс·м); номера гидроприводов 5; 10; 20 — максимально допустимый момент на валу силового управления (кгс·м).
Регулирование с помощью изменения рабочего объема гидродвигателя. Регулирование с помощью изменения рабочего объема гидродвигателя применяется только в гидроприводах вращательного движения, где в качестве гидродвигателя используется регулируемый гидромотор (рис.3,8 б); в этом случае регулирование происходит при постоянной мощности, так как уменьшение рабочего объема гидродвигателя увеличивает скорость выходного звена гидропривода и соответственно уменьшает крутящий момент, развиваемый на выходном звене.
Частота вращения гидромотора nм при р1<р2 определяется соотношением:
 (3.5)
(3.5)
где qм – рабочий объем гидромотора; p1 — давление в напорной гидролинии, определяемое моментом на валу гидродвигателя из формулы
М= qм·р·ηм/(2π)=р·d2·D·tgγ·z·ηм/8;
здесь ηм – механический КПД, d – диаметр осей плунжеров, D – расстояние между осями плунжера; z – их количество, γ – угол наклона качающего блока (γmax=23…250)
Из выражения (3.5) следует, что при qм→0 nм возрастает до бесконечности. Практически существует минимальное значение qм, при котором момент, развиваемый гидромотором, становится равным моменту внутреннего трения, и гидромотор тормозится даже при моменте нагрузки, равном нулю (р1=0). Так как в современных гидромоторах момент трения невелик (высокий механический КПД то при одних и тех же габаритах и весах гидропривода диапазон регулирования скорости при изменении рабочего объема гидродвигателя оказывается больше, чем при изменении рабочего объема насоса. Увеличение диапазона регулирования при таком способе не связано с ростом габаритов и весов, ибо диапазон регулирования не зависит от максимальных рабочих объемов гидродвигателя и насоса. Недостатками системы с регулируемым гидромотором являются: ограниченная возможность применения, связанная с самоторможением мотора при значительном уменьшении его рабочего объема, и сложность управления скоростью гидропривода, если гидродвигатель расположен далеко от оператора (необходимость дистанционного управления).
Регулирование с помощью изменения рабочих объемов насоса и гидродвигателя. Регулирование с помощью изменения рабочих объемов насоса и гидродвигателя используется только в гидроприводах вращательного движения с регулируемым гидромотором в качестве гидродвигателя (рис.3.8 в). Такой способ регулирования объединяет все достоинства и недостатки рассмотренных выше способов. Скорость выходного звена рационально регулировать в следующем порядке:
1) запускают приводной двигатель при нулевой подаче насоса;
2) для страгивания и разгона выходного звена гидропривода увеличивают подачу насоса при qм = qмmax;
3) диапазон регулирования насоса ограничивают зоной наибольших значений КПД, а дальнейшее увеличение скорости обеспечивают уменьшением рабочего объема гидромотора при qм = const.
Такая система позволяет получить весьма большой диапазон регулирования, который равен произведению диапазонов регулирования насоса и гидромотора.
Стабилизация скорости движения. В гидроприводах с объемным регулированием изменение скорости относительно заданного значения при изменении нагрузки на выходе гидроцилиндра обусловлено только изменением величины утечек, т. е. переменностью объемного КПД насоса и гидродвигателя в зависимости от давления в системе, величина которого определяется нагрузкой. Так как объемный КПД современных гидромашин достаточно высок и мало изменяется при увеличении давления (например, для регулируемых насосов типа 4МГ15 η0 =0,98 при р=5 МПа), то скорость движения выходного звена в таких гидроприводах значительно стабильнее, чем в гидроприводах с дроссельным регулированием.
На рис. 3.9 для сравнения приведены зависимости скорости от нагрузки при различных способах регулирования гидропривода (1 —дроссельное регулирование с регулятором потока; 2 — объемное регулирование без стабилизации скорости; 3 — последовательно-дроссельное регулирование; 4 — параллельно-дроссельное регулирование). Уменьшение скорости выходного звена гидропривода с объемным регулированием при возрастании нагрузки от 0 до Fmax составляет не более 12—14% скорости холостого хода vx.x, что практически соответствует точности стабилизации гидроприводов с регуляторами потока. Поэтому в большинстве случаев гидроприводы с объемным регулированием применяют без специальных стабилизирующих устройств. Однако в системах, где требуется очень высокая степень стабилизации (например, в гидроприводах металлорежущих станков), применяют объемный способ регулирования скорости с дополнительной стабилизацией.
На рис. 3.10 представлена принципиальная схема гидропривода вращательного движения с разомкнутой циркуляцией, в которой регулирование скорости осуществляется изменением рабочего объема аксиально-поршневого насоса 2. Некоторое заданное значение угловой скорости гидромотора 1 ω3 устанавливается положением вспомогательного цилиндра управления 3, шток которого связан с наклонным диском насоса.
| Рисунок 3.9 – Зависимости скорости штока от нагрузки при различном регулировании | Рисунок 3.10 – Регулирование скорости гидромотора изменением рабочего объема насоса |
Координата х3 соответствует значению ω3. При угловой скорости ω=ω3 в штоковой полости цилиндра 3 устанавливается давление p1=p0, величина которого определяется перепадом давления на дросселе 4. В случае увеличения момента нагрузки на валу гидромотора 1 за счет роста объемных потерь уменьшится угловая скорость вала и, следовательно, расход в сливной гидролинии. Перепад на дросселе 4 уменьшится, и p1 станет меньше p0, в результате поршень цилиндра 3 под действием пружины сместится влево увеличив наклон диска и подачу насоса 2, восстановив тем самым значение ω=ω3. Соответственно увеличение ω по сравнению с ω3 приведет к росту давления p1 относительно p0 и уменьшению подачи насоса. Изменение направления движения выходного звена гидропривода осуществляется двухпозиционным распределителем 5. Благодаря возможности регулирова-ния проводимости дросселя 4 можно изменять коэффициент усиления системы стабилизации угловой скорости выходного вала.
Дата добавления: 2017-06-13; просмотров: 5807;
Поиск по сайту
Узнать еще
- Аварийно-спасательный инструмент с гидроприводом
- АЭП с АД с реостатным регулированием.
- Вспомогательные устройства гидропривода
- Выбор рабочей жидкости для гидропривода
- Выпрямители с механическим регулированием
- Гидропривод ведущих колес прицепа
- Гидропривод с дроссельным регулированием скорости при параллельном включении гидродросселя.
- Гидропривод с дроссельным регулированием скорости при последовательном включении гидродросселя.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
