Средства отображения информации на дискретных индикаторах: Системы адресации в СОИ на дискретных индикаторах
Известно, что дискретные индикаторы могут работать в двух режимах − статической и динамической индикации. В режиме статической индикации состояния ЭО меняются только при обновлении воспроизводимой информации. Происходит это с частотой fобн = 1/Tобн, причем все выбранные ЭО работают одновременно. Статическая индикация может быть непрерывной или импульсной.
Режим динамической индикации характеризуется тем, что разные элементы или группы ЭО, образующие индикаторное поле, включаются в разные части периода кадра Тк. При этом, пока воспроизводимая информация остается неизменной, фаза и длительность включенного состояния ЭО внутри периода кадра сохраняются, т. е. Tобн ≥ Тк.Для получения немелькающего изображения должно выполняться условие fк > fкчм, а за период кадра Ткнеобходимо адресовать все элементы, составляющие изображение. Поэтому скважность оказывается обратной числу групп элементов отображения.
Режим с такой регенерацией изображения характеризуется следующими соотношениями:
1) для яркости [согласно формуле (1.19)]
Lυ.каж = Lυи/qυ, (5.1)
где qυ - скважность импульсов излучения, Lυ.каж - кажущаяся (усредненная во времени) яркость, Lυи- мгновенная яркость;
2) для времени выборки
tв=1/(fкq). (5.2)
Из-за инерционности индикатора обычно q ≤ qυ (q - скважность сигналов выборки). Те же соотношения можно использовать для режима статической индикации, если вместо fк подставить fобн, причем для непрерывной статической индикации qυ = 1, а для импульсной статической индикации qυ >1.
Прежде чем перейти к конкретным схемам управления индикаторами, рассмотрим основные системы адресации, выделив из них наиболее важные: 1) однокоординатной адресации; 2) двухкоординатной матричной адресации; 3) многоуровневой адресации; 4) адресации со сканированием.
Система однокоординатной адресации отличается тем, что каждый ЭО имеет два независимых от других ЭО входа, к которым и прикладываются сигналы со схемы возбуждения. Очевидно, независимость ЭО друг от друга по управлению сохраняется и тогда, когда для уменьшения числа соединений их вторые управляющие входы объединяются (рис. 5.1). Так как управляющие входы независимы, то при однокоординатной адресации ЭО могут включаться одновременно и на любой промежуток времени. Это позволяет организовать статическую индикацию, т. е. использовать умеренные значения импульсных яркостей Lυи и большие времена выборки tв(см. (5.1) и (5.2)).
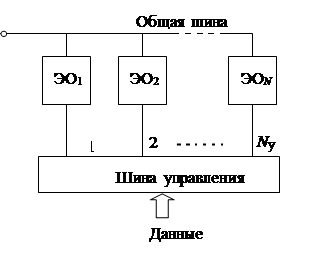
Рис. 5.1. Подключение элементов отображения
при однокоординатной адресации
Преимуществом однокоординатной адресации является также отсутствие жестких требований к параметрам индикатора. Например, если взять вольтконтрастную характеристику жидкокристаллического твист-индикатора (см. рис. 2.31), то легко видеть, что для нормальной работы достаточно обеспечить выполнение условий включения Us0 < UOH и выключения U10 > UOL, где UOL, UOH - выходные напряжения логического 0 и 1 схемы управления. Эти условия выполняются с большим запасом, если взять в качестве управляющих микросхемы серии К176, у которых UOL ≤ 0,3 В, UOH ≥ 8,2 В (поскольку для них U10 = 0,65 В и U50 = 1,70 В).
И, в общем случае, для любой электрооптической характеристики индикатора удается подобрать схему управления с не слишком большим напряжением UOL, но таким, чтобы условия включения и выключения выполнялись даже при большом разбросе параметров ЭО.
В то же время схемы однокоординатной адресации многоэлементных индикаторов имеют существенные недостатки - большое число каналов управления
Nу = Nэо (5.3)
и выводов индикатора
Nв ≥ Nэо + 1.(5.4)
Например, для 7-сегментного цифрового индикатора с десятичной точкой число выводов на один разряд равно 8 + 1 = 9, а на три разряда - уже 27. Если взять буквенный индикатор, у которого знакоместо образовано матрицей точек 5×7, то на три знакоместа уже понадобится 35×3 + 1 = 106 выводов. Из-за трудности создания индикаторов и схем управления с большим числом выводов и, в особенности, из-за трудности их соединения между собой, применение методов с однокоординатной адресацией ограничивается цифровыми СОИ на три-четыре знакоместа или буквенными СОИ на одно знакоместо. Однако воспользоваться преимуществами схемы однокоординатной адресации можно, совместив ее интегрально с индикатором.
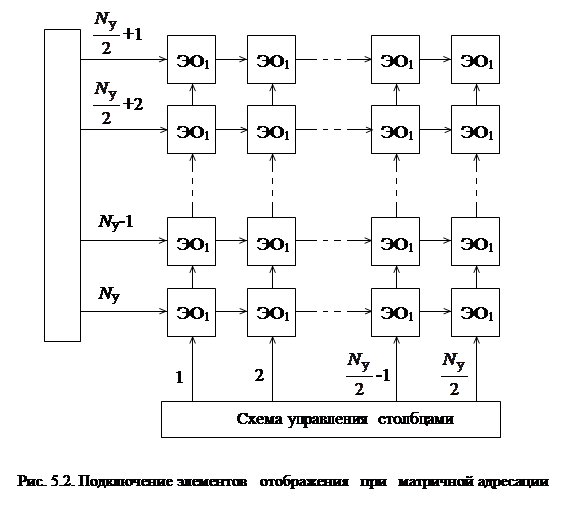
Для адресации ЭО в дискретных индикаторах наиболее широко применяется метод двухкоординатной матричной адресации (рис. 5.2). Здесь, в отличие от однокоординатной адресации, каждый выход схемы управления присоединяется к множеству ЭО, причем схема управления разбита на две части, соединенные по строкам и столбцам с управляющими входами ЭО. Включение ЭО происходит только тогда, когда сумма сигналов на его входах превысит напряжение включения.
Система с матричной адресацией обеспечивает значительное уменьшение числа каналов управления и выводов индикатора (при условии его выполнения с общими электродными шинами). Здесь
Ny = Nв = 2[  ] , (5.5)
] , (5.5)
где [х] обозначает округление величины х до большего целого числа. Для матричного индикатора с Nэо = 35×3 получим Ny = Nв = 2[  ] = 23 вместо 105 каналов управления и свыше 106 выводов индикатора по (5.3) и (5.4).
] = 23 вместо 105 каналов управления и свыше 106 выводов индикатора по (5.3) и (5.4).
Недостатком двухкоординатной матричной адресации является то, что при полном возбуждении определенных ЭО может происходить частичное возбуждение других ЭО, что ухудшает качество изображения.
Для анализа возбужденных и частично возбужденных состояний ЭО рассмотрим схему, показанную на рис. 5.3, где ЭО в строке Х2и столбце Y2 возбуждается (состояние, обозначаемое 1) приложением напряжений  и
и  . Все остальные ЭО не возбуждены, для чего на них подаются напряжения
. Все остальные ЭО не возбуждены, для чего на них подаются напряжения  и
и  . Для малоинерционных индикаторов, у которых время включения и выключения много меньше длительности управляющего воздействия (т. е. практически для всех индикаторов активного типа), оптимальные условия соответствуют максимальному отношению U1/U0для возбужденной и невозбужденной ячеек.
. Для малоинерционных индикаторов, у которых время включения и выключения много меньше длительности управляющего воздействия (т. е. практически для всех индикаторов активного типа), оптимальные условия соответствуют максимальному отношению U1/U0для возбужденной и невозбужденной ячеек.
Здесь можно выделить два случая: 1) ЭО обладает выпрямляющими свойствами; 2) ЭО не обладает таковыми свойствами.
В первом случае (например, светодиоды или любые ЭО с последовательно включенными диодами) адресация осуществляется подачей напряжения U на выбранный столбец и заземлением выбранной строки (рис. 5.3).
  | |||
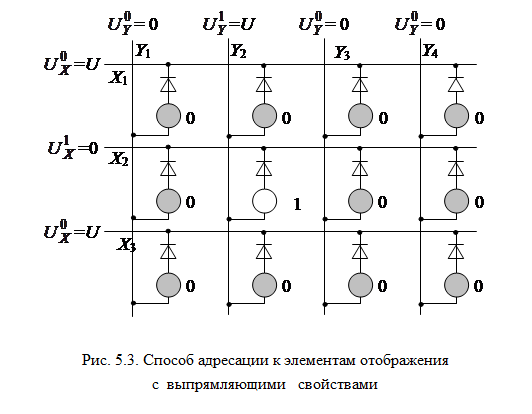 |
Все невозбуждаемые столбцы заземляются, а на все невозбуждаемые строки подается напряжение U. Отношение напряжений U1/U0в этом случае выражается через сопротивления элементов отображения (Rэо)и обратное сопротивление диода (Rд) как
U1/U0 = ( Rд+ Rэо)/ Rэо . (5.6)
Очевидно, что при Rд >> Rэо выражение (5.6) стремится к бесконечности.
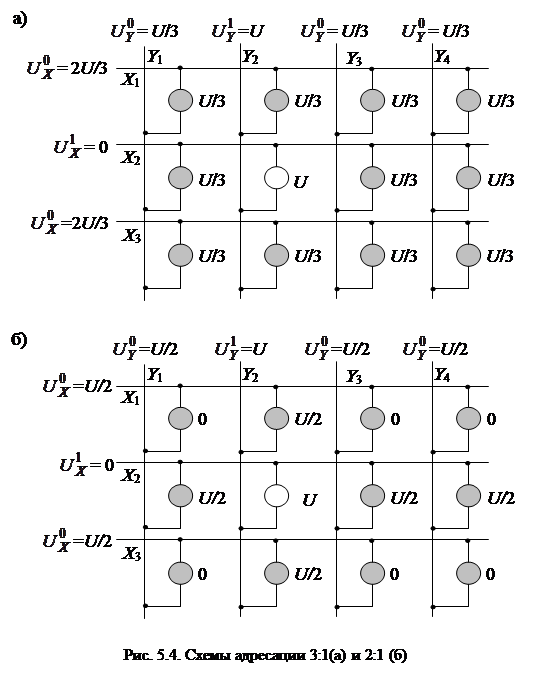
В случае невыпрямляющего индикатора наиболее целесообразно брать напряжения и равными соответственно 1/3 и 2/3 от полного напряжения питания (рис. 5.4, а). В этом случае напряжение, приложенное к возбужденному ЭО, находящемуся между точками Х2 - Y2, равномерно делится между любыми тремя последовательно включенными невозбужденными ЭО. Такая схема адресации называется схемой 3:1 (U1/U0= 3). Ее недостатком является необходимость использования трех уровней питания 1/3U, 2/3U и U. Кроме того, к ЭО могут прикладываться напряжения разных полярностей и достаточно большой величины. Более простая схема адресации 2:1 изображена на рис. 5.4, б. В ней использованы только два уровня питающих напряжений, но отношение U1/U0составляет всего 2:1.
На рисунках 5.3 и 5.4 видно, что во всех трех рассмотренных случаях количество одновременно выбираемых ЭО ограничено необходимостью возбуждения одних ЭО и невозбуждения других. В статическом режиме можно независимо возбудить любое число ЭО, расположенных вдоль одной строки или одного столбца. Это позволяет создавать шкалы, но не двумерные изображения. В последнем случае приходится применять динамический режим двухкоординатной матричной адресации.
В динамическом режиме выборка ЭО производится одним из следующих способов: поэлементным, построчным и функциональным.
В поэлементном способе последовательно производится выборка одного ЭО за другим по всему индикаторному полю (как это делается в растровом дисплее). В этом случае
q = NсNсб (5.7)
Из выражений (5.1) и (5.2) вытекает, что для больших Nэопоэлементный способ связан с необходимостью использования больших Lυии малых tв, т. е. мощных импульсных ключей и быстродействующих индикаторов и схем управления ими.
При построчномспособе последовательно производится выборка одной строки за другой (или столбца за столбцом), причем одновременно в каждой строке возбуждаются все необходимые для формирования изображения ЭО. Поэтому скважность
q = Nс. (5.8)
В функциональномспособе возбуждаются только те ЭО, из которых состоит изображение, что дает формулу для скважности в виде
q = Nф, (5.9)
где Nф - число возбуждаемых функциональных ЭО.
 |
Из (5.1), (5.2), (5.7) − (5.9) следует, что наименьшее значение Lυи и наибольшее tвпри плотном заполнении экрана информацией обеспечивает способ построчной адресации, который рассмотрим более подробно.
Диаграммы напряжений для участка матричного поля, представленного на рис. 5.4, при построчной адресации с выборкой по схеме 2:1 приведены на рис. 5.5. Эти диаграммы соответствуют информации, по которой включенными должны оказаться ячейки X1Y2, X1Y3 и X3Y3 (падение напряжения на этих ячейках равно Uij = U) Остальные ячейки должны быть в невключенном состоянии (Uij = 0) или быть лишь частично возбужденными (Uij = U/2). На рис. 5.5 видно, что в определенные периоды времени это реализуется.
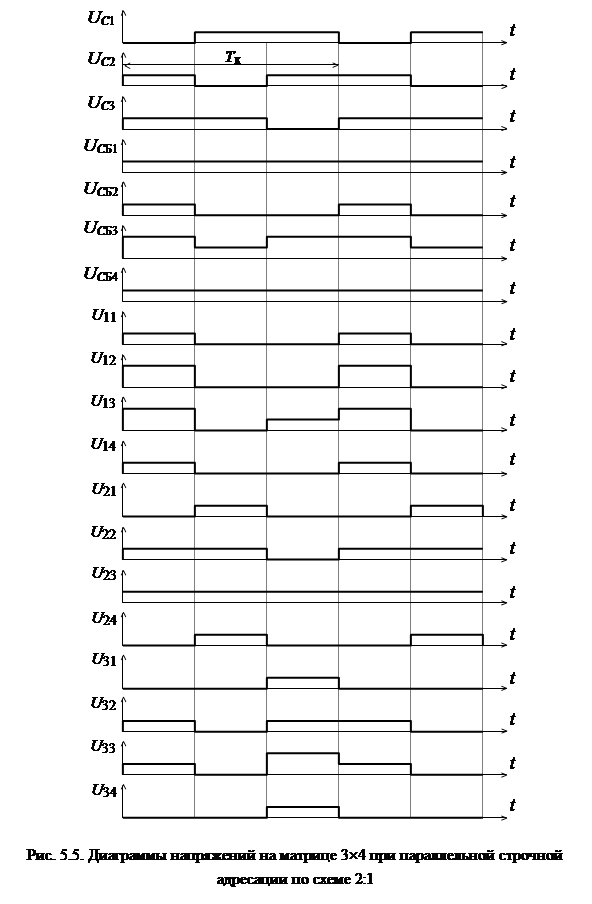 |
Отметим, что здесь я использованы обозначения: UСi – напряжение, подаваемое на i-ю строку, а UСБj напряжение на j-ом столбце, Uij – разность потенциалов между i-ой строкой и j-ым столбцом.
Определим контраст между этими ячейками по формуле (1.12), считая что первая из них создает фон с яркостью Lvф, а вторая - изображение с яркостью Lv0.
Считая, что развертка осуществляется по Nс, получим
 =
=
=  . (5.10)
. (5.10)
В этом выражении Кобр.дм и Кобр.с − обратные контрасты, получаемые при динамической матричной и статической адресациях. Из (5.10) вытекает, что при значении Nс,равном 1/(1 − Кобр.с), контраст равен нулю. Если задаться допустимым для буквенно-цифровой индикации значением контраста, равным 0,6 (см. гл. 1), то максимально допустимое число строк для матричной адресации
Nс max = 0,4/(1 - Кобр.с). (5.11)
Выражение (5.10) можно также использовать для определения Кобр.дм по известному значению Кобр.с.
| <== предыдущая лекция | | | следующая лекция ==> |
| Электронно-лучевые трубки | | | Системы адресации в СОИ на инерционных дискретных индикаторах |
Дата добавления: 2017-05-02; просмотров: 1536;
Поиск по сайту
Узнать еще
- B. Медленно действующие противоревматоидные средства
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I. Решение логических задач средствами алгебры логики
- I. Способы представления переменного синусоидального тока и напряжения.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
