Определение порядка линейной динамической системы на основе анализа коэффициента структурности
Известно, что порядок динамической системы определяется его линейной частью, поэтому коэффициент структурности  можно использовать в качестве критерия структурной идентификации. Так как анализ наблюдаемого информационного портрета выполняется в пространстве наблюдаемых переменных, то коэффициент структурности носит обобщенный характер и в общем случае не позволяет судить о структурных свойствах динамической системы. Это, в свою очередь, требует привлечения новых подходов к анализу имеющейся информации. Ниже излагается метод оценки порядка модели, основанный на расширении входного пространства системы путем введения вспомогательных переменных, которые позволяют учитывать динамические свойства системы.
можно использовать в качестве критерия структурной идентификации. Так как анализ наблюдаемого информационного портрета выполняется в пространстве наблюдаемых переменных, то коэффициент структурности носит обобщенный характер и в общем случае не позволяет судить о структурных свойствах динамической системы. Это, в свою очередь, требует привлечения новых подходов к анализу имеющейся информации. Ниже излагается метод оценки порядка модели, основанный на расширении входного пространства системы путем введения вспомогательных переменных, которые позволяют учитывать динамические свойства системы.
Рассмотрим систему
 (6)
(6)
где  ,
,  — вход и выход системы,
— вход и выход системы,  ,
,  ,
,  ,
,
 ,
,
 — вектор параметров,
— вектор параметров,  ,
,  , пара
, пара  является управляемой, спектр
является управляемой, спектр  собственных чисел матрицы L лежит в левой полуплоскости.
собственных чисел матрицы L лежит в левой полуплоскости.
Систему (6) можно привести к следующей выходной форме с обобщенным входом
 , (7)
, (7)
где  — вектор параметров,
— вектор параметров,  ,
,  — обобщенный вход,
— обобщенный вход,  ,
,  — вектор, полученный путем пропускания переменных
— вектор, полученный путем пропускания переменных  через вспомогательную устойчивую систему.
через вспомогательную устойчивую систему.
Для системы (7) известно множество экспериментальных данных
 . (8)
. (8)
На основе (8) и НИП определяется коэффициент структурности
 . (9)
. (9)
Назовем
 (10)
(10)
шириной интервала изменения коэффициента .
Ставится задача: на основе анализа множества  необходимо найти порядок
необходимо найти порядок  системы (6) таким образом, чтобы минимизировать ширину интервала изменения коэффициента
системы (6) таким образом, чтобы минимизировать ширину интервала изменения коэффициента
 . (11)
. (11)
Для системы (7) порядок системы понимается как число , соответствующее размерности вектора  .
.
При решении практических задач вместо (11) можно потребовать выполнения более слабого условия
 ,
,
где  — некоторая величина, которая обычно задается исходя из конструктивных соображений.
— некоторая величина, которая обычно задается исходя из конструктивных соображений.
Так как  , то вычисление на основе (8) может привести к неполноте учета структурных (динамических) свойств системы. Учитывая это, предлагается следующий алгоритм определения .
, то вычисление на основе (8) может привести к неполноте учета структурных (динамических) свойств системы. Учитывая это, предлагается следующий алгоритм определения .
1. Для  на основе (8) вычислить величину коэффициента структурности
на основе (8) вычислить величину коэффициента структурности  и по нему найти ширину
и по нему найти ширину  согласно (10). Обозначить
согласно (10). Обозначить  ,
,  ,
,  ,
,  .
.
2. Положить  и сгенерировать вспомогательные переменные
и сгенерировать вспомогательные переменные  и
и  путем решения системы с нулевыми начальными условиями
путем решения системы с нулевыми начальными условиями
 (12)
(12)
где  .
.
Сформировать сигнал
 (13)
(13)
и для него определить коэффициент структурности 
 (14)
(14)
и ширину  .
.
4. Сравнить  и . Если
и . Если  , то положить
, то положить  и закончить процедуру. В противном случае перейти к шагу 2.
и закончить процедуру. В противном случае перейти к шагу 2.
Пример определения порядка модели для стационарной системы (4) показан на рис. 2. Здесь использованы следующие обозначения:  вычисляется согласно (9),
вычисляется согласно (9),
 ,
,  .
.
Ширины интервалов изменения коэффициентов структурности, соответственно, равны  ;
;  ;
;  .
.
На основе полученных результатов можно сделать вывод о том, что для идентификации системы (4) можно применить линейную динамическую модель второго порядка со структурой вектора  , соответствующей коэффициенту
, соответствующей коэффициенту  .
.
Если система является нелинейной, то следует выполнить процедуру кластеризации множества

с тем, чтобы выделить подмножество данных  , позволяющее идентифицировать линейную часть системы. На множестве можно реализовать описанный выше алгоритм.
, позволяющее идентифицировать линейную часть системы. На множестве можно реализовать описанный выше алгоритм.
Замечание. Так как коэффициент структурности содержит динамическую составляющую и переменная  , используемая в (10), в реальных системах представляет собой взвешенную комбинацию сигналов
, используемая в (10), в реальных системах представляет собой взвешенную комбинацию сигналов  , то вместо
, то вместо
в алгоритме используется более слабое условие
 ,
,
которое учитывает специфику системы.
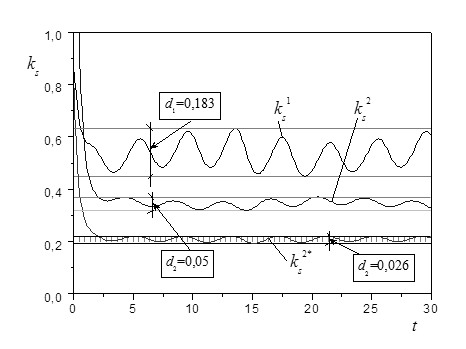
Рис. 1. Интервал изменения коэффициента структурности
Дата добавления: 2017-02-13; просмотров: 867;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
