Метод преобразования координат.
Применение ЭВМ для кинематического анализа механизмов связано с разработкой соответствующих алгоритмов и программ расчёта. Наиболее просто такие алгоритмы реализуются с использованием уравнений преобразования координат в матричной форме записи необходимых операций вычисления.
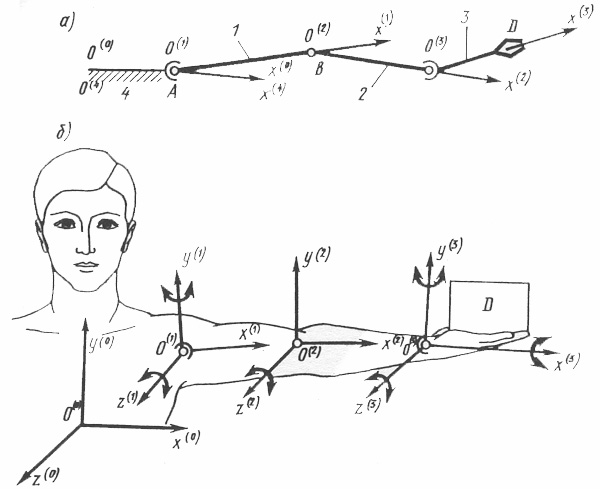
При этом методе выбирают некоторое число систем координат, достаточное для математического описания геометрической формы звеньев и относительного движения звеньев в каждой кинематической паре. Число систем координат определяется числом элементов звеньев, образующих кинематические пары. Неподвижная система координат  связана со стойкой. В каждой кинематической паре выбирают две системы координат (способ 1) или одну систему координат (способ 2). При 1-м способе две системы координат относятся к элементам пары звеньев, образующих эту пару. При втором способе каждой кинематической паре соответствует прямоугольная система координат, одна из осей которой связана с характерными признаками звена, например осевой линией. Для примера на рис. 5.9, а показаны координатные оси
связана со стойкой. В каждой кинематической паре выбирают две системы координат (способ 1) или одну систему координат (способ 2). При 1-м способе две системы координат относятся к элементам пары звеньев, образующих эту пару. При втором способе каждой кинематической паре соответствует прямоугольная система координат, одна из осей которой связана с характерными признаками звена, например осевой линией. Для примера на рис. 5.9, а показаны координатные оси  (или
(или  ) четырехзвенной открытой кинематической цепи из звеньев 1, 2, 3, 4, моделирующей структуру руки человека (рис. 5.9, б). Ось
) четырехзвенной открытой кинематической цепи из звеньев 1, 2, 3, 4, моделирующей структуру руки человека (рис. 5.9, б). Ось  направляют вдоль оси пары, а ось
направляют вдоль оси пары, а ось  дополняет правую систему координат
дополняет правую систему координат  .
.
Начало координат каждой i-й локальной координатной системы совмещают с той кинематической парой, которой данное звено соединено с предыдущим звеном. Для плоских механизмов оси  параллельны между собой, так как они перпендикулярны базовой плоскости, в которой рассматривается движение звеньев плоского механизма.
параллельны между собой, так как они перпендикулярны базовой плоскости, в которой рассматривается движение звеньев плоского механизма.
|
 |
Переход от i-й локальной координатной системы к другой (i+1) системе определяется уравнениями преобразования декартовых прямоугольных координат, в общем случае – переноса и поворота координатных осей.
Применение метода будет продемонстрированною на конкретном примере в лекции 25 «Манипуляторные роботы».
Контрольные вопросы к лекции N5:
1. Как построить графически функцию положения механизма и её производные?
2. Как рассчитать масштабы кинематических диаграмм?
3. Как определить величину и направление угловых скоростей и угловых ускорений звеньев?
4. Как аналитически определить функцию положения, передаточные функции скорости и ускорения ползуна кривошипного механизма?
5. В чём заключается преимущества и недостатки аналитического и графического методов кинематического анализа?
Дата добавления: 2017-02-13; просмотров: 2193;
Поиск по сайту
Узнать еще
- He рекомендуем использовать данный метод, если в дальнейшем будет необходимость прибегнуть к отгибу приборной панели.
- I. История открытия и методы исследования вирусов
- I. Расчёт методом контурных токов.
- I. Судовождение, основанное только на лоцманском методе.
- I.7.1 ПРЕОБРАЗОВАНИЯ ГАЛИЛЕЯ
- I.7.3 ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА
- II. Категории и методы политологии.
- II. Общие методические принципы в канистерапии

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
