Глава 4. ФАКТОРЫ ОКРУЖАЮЩЕЙ СРЕДЫ.
Среди множества воздействующих на РЭС факторов особое место занимает группа факторов характеризующих среду обитания - окружающую РЭС среду. В данном разделе представлены основные из этих факторов, причем указаны способы их учета в ТЗ на разработку.
Особенность рассматриваемой темы состоит в том, что факторы окружающей среды и объекта установки часто очень тесно связаны, поэтому в процессе проектирования РЭС их трудно разделить и в ТЗ они также пересекаются. Начнем анализ с учета группы климатических факторов.
4.1. Виды климатических факторов.
Климат - характерная для данной области (региона) на поверхности Земли совокупность типичных изменений атмосферных процессов, обуславливаемых географическими координатами, уровнем солнечной радиации, строением земной поверхности, вертикальным теплообменом и другими определяющими метеорологическими факторами за длительное (20…30 лет) время.
К климатическим факторам относят:
- изменение температуры и тепловой удар;
- влажность окружающей среды;
- увеличение или уменьшение атмосферного давления;
- наличие движущихся потоков пыли и песка;
- присутствие активных веществ в окружающей атмосфере;
- наличие солнечной радиации;
- грибковые образования (плесень);
- микроорганизмы, насекомые, грызуны.
Рассмотрим, как сказывается наличие тех или иных климатических факторов на работе РЭС.
Изменение температуры связано с изменением температуры окружающей среды и с выделением тепла при работе РЭС. При повышении температуры происходит физическое изменение материалов, нарушение изоляционных свойств. Происходит интенсивное старение материалов с потерей механических и электрических свойств. При колебании температуры изменяется емкость конденсаторов, снижается сопротивление изоляции, меняется собственная емкость, добротность контуров и сопротивление резисторов. В результате нарушается настройка РЭС, снижается чувствительность и избирательность радиоприемных устройств.
Если при разработке несущих конструкций не будут учтены изменения линейных размеров при изменениях температуры, то при эксплуатации возможно заклинивание или деформация связей.
Тепловой удар заключается в резком увеличении температуры и исчисляется минутами, а величина перепада - десятками градусов. От теплового удара в первую очередь разрушаются хрупкие материалы - стекло, керамика, некоторые пластмассы.
Атмосферное давление. Снижение его снижает электрическую прочность воздуха, вследствие чего пробивное напряжение падает. Ухудшается и поверхностное сопротивление изоляционных деталей. Снижается теплопроводность воздуха, ухудшаются условия охлаждения аппаратуры.
Влажность является одним из наиболее агрессивных факторов. Вода, содержащаяся в атмосфере, всегда загрязнена активными веществами (углекислыми и сернистыми солями кальция, магния, железа, азотом, кислородом, углекислым газом и др.). Концентрация солей в воде морей и рек доходит до 5%. Капли дождя при ударах о корпус вызывают механические вибрации. Влага приводит к параметрическим и внезапным отказам. Наиболее чувствительны к ней элементы и структуры ИС. Влага приводит к электрохимической и химической коррозии, образованию закорачивающихся перемычек, увеличению диэлектрической проницаемости, потерь и утечек в диэлектриках. На поверхности полупроводниковых приборов влага приводит к накоплению зарядов в полупроводнике под влиянием поверхностных ионов.
Конструкционные металлы в присутствии влаги корродируют. Наиболее устойчив к коррозии алюминий вследствие своей поверхностной окисной пленки. Недопустима для применения в конструкциях пара алюминий - медные сплавы с точки зрения электрохимической коррозии (корродирует алюминий). Латуни и бронзы устойчивы во влажном климате и промышленной атмосфере. Стали особенно сильно корродируют в присутствии хлоридов, SО2 и СО2. Однако содержание хрома более 12% делает стали нержавеющими (15Х, 20Х).
Изоляционные материалы диффузно поглощают влагу. При этом поглощение происходит в сторону меньшей ее концентрации, т.е. при повышенной влажности воздуха молекулы воды проникают внутрь материала, а при сухой атмосфере - наружу, таким образом происходит поглощение влаги и высыхание. Поглощение влаги диэлектриком приводит к уменьшению сопротивления его изоляции, увеличению диэлектрических потерь, набуханию, механическим повреждениям.
Пыль и песок находятся в атмосфере и движутся вместе с воздушным потоком. Вблизи городов и ТЭЦ содержание их увеличивается, причем большую часть составляют продукты сгорания серы. Кроме того, в состав пыли входят как неорганические (зола, сажа), так и органические частицы текстильного и растительного происхождения. Сухие частицы вследствие адсорбирования ионов могут быть заряжены и оседают на деталях, находящихся под напряжением.
Песок состоит из округленных частиц кварца размером 0,06…0,08 мм, концентрация его увеличивается с увеличением скорости движения масс воздуха.
Грибковые образования чаще всего поражают изоляционные материалы на основе целлюлозы. Грибки не имеют хлорофилла и используют для роста органические вещества. Помимо питательных веществ для развития плесени необходима влажность 70…100%, т.к. она не имеет защиты от испарения. Способствует росту плесени и неподвижность воздуха. Поэтому РЭС в тропическом исполнении должна иметь защиту от плесневых грибов. Споры грибов поступают из почвы и распространяются с пылью. Они имеют стойкость к холоду, жаре, ядам и несколько лет сохраняют способность к размножению. Стойкость против образования имеют уретановые лаки с противоплесневыми ядами - фунгицидами.
Неисправности РЭС связаны также и с насекомыми, которые летят на свет и тепло. Их трупы, особенно при повышенной влажности, способствуют коррозии и образуют благоприятную среду для грибковой плесени.
Другие группы факторов, такие как воздействия ветра и гололеда, солнечной радиации, полей СВЧ, также будут рассмотрено в соответствующих разделах курса.
Факторы окружающей среды делят на:
рабочие, при которых РЭС должна сохранять требуемые значения выходных параметров в течение всего периода эксплуатации;
предельные, при воздействии которых на РЭС необходимо сохранение работоспособности без сохранения номинальных значений выходных параметров в течение заранее заданного периода времени (как правило до 6 часов).
Для учета факторов окружающей среды при проектировании РЭС в ТЗ в соответствующие разделы вносятся необходимые требования к аппаратуре.
4.2. Отражение в ТЗ факторов окружающей среды.
Существует несколько возможностей учета требований к РЭС в ТЗ. Одним из основных является задание варианта климатического исполнения аппаратуры.
Климатическое исполнение (ГОСТ 6019-78). Остановимся подробнее на этом пункте. В зависимости от климата района эксплуатации РЭС различают девять основных климатических исполнений изделий:
1) У - умеренный климат со среднегодовыми изменениями температуры +40oС и – 45oС.
2) УХЛ - умеренный и холодный; при Т мин < - 45o С.
3) ТВ - влажный и тропический; относительная влажность 80% и выше действует на изделие более половины суток ежедневно в течение двух месяцев и более.
4) ТС - сухой тропический; температура +40oС.
5) М - умеренно холодный морской; моря и океаны севернее 30o северной широты или 30o южной .
6) ТМ - морской климатический; ; моря и океаны между 30o северной широты и 30o южной широты.
7) О - общеклиматическое для суши.
8) ОМ - морское общеклиматическое; неограниченный район плавания.
9) В - всеклиматическое для суши и моря.
Стандартизация и кодификация климатических исполнений существенно упрощает задание соответствующих требований, т.к. позволяет четко представить всю программу комплексного воздействия внешней среды в количественном выражении. Подробно вопрос воздействий рассмотрен в другом разделе ТТ, при обсуждении комплекса условий эксплуатации РЭС.
Категория размещения на объекте: пять укрупненных и шесть дополнительных категорий. Категории размещения на объекте также стандартизованы и кодифицированы:
Категории размещения. Таблица 4.1.
| Укрупненные категории | Дополнительные категории |
| 1: на открытом воздухе | 1.1.: для хранения и работы в помещении категории 4 и для кратковременной работы в других условиях, в том числе на открытом воздухе |
| 2: под навесом и на объектах, где колебания температуры и влажности несущественно отличаются от условий открытого воздуха (палатки и т.п.) | 2.1.: внутри изделий категорий размещения 1; 1.1; 2, но при условии исключения конденсации влаги (например, внутри РЭС). |
| 3: в закрытых помещениях с естественной вентиляцией без кондиционирования | 3.1.: в нерегулярно отапливаемых помещениях (объектах). |
| 4: в помещениях (объектах) с искусственным климатом | 4.1.: при кондиционировании или частичном кондиционировании 4.2.: внутри промышленных отапливаемых зданий. |
| 5: в помещениях (объектах) с повышенной влажностью, приводящей к частой конденсации влаги на стенах и потолке | 5.1.: внутри изделий категории 5, на при условии исключения конденсации влаги на данном изделии. |
Указанные категории размещения конструкций РЭС на объекте не распространяются на летательные аппараты с высотным потолком более 1000 м. Для таких конструкций предусмотрена классификация по группам пониженного давления, табл. 4.2.
Группы пониженного давления. Таблица 4.2.
| Группа | Давление | Высота над уровнем моря, тыс.м | Группа | Давление | Высота над уровнем моря, тыс.м | ||
| кПА | Мм рт.ст. | кПА | Мм рт.ст. | ||||
| А а | 70,0 | 2,4 | К и | 1,3 10-1 | 45,8 | ||
| B б | 60,0 | 3,5 | Л к | 1,3 10-2 | 10-1 | 63,6 | |
| В в | 53,3 | 4,3 | М л | 1,3 10-4 | 10-3 | 91,7 | |
| Г г | 26,7 | 9,4 | Н м | 1,3 10-7 | 10-6 | 200 (ближний космос) | |
| Д д | 12,0 | 14,4 | О н | 1,3 10-10 | 10-9 | Средний космос | |
| Е е | 4,4 | 20,0 | П о | 1,3 10-13 | 10-12 | Дальний космос | |
| Ж ж | 2,0 | 26,0 | П п | 1,3 10-14 | 10-13 | То же | |
| З з | 0,6 | 34,0 |
Главной особенностью условий эксплуатации РЭС летательных аппаратов является снижение электрической прочности воздушных промежутков для конструкций РЭС, расположенных вне герметичного отсека или корпуса.
Изменение электрической прочности воздуха. Таблица 4.3.
| Высота над уровнем моря, тыс. м | ||||||
| Относительная электрическая прочность | 1,0 | 0,80 | 0,62 | 0,35 | 0,1 | 0,03 |
4.3. Эксплуатационные факторы.
Для учета в целом факторов окружающей среды и объекта установки, в ТЗ обычно формируется под раздел ТТ, который называется "Условия эксплуатации".
Эксплуатационные требования к изделию включают в себя:
1) устойчивость к климатическим воздействиям (ГОСТ 15150-69);
2) устойчивость к механическим воздействиям (ГОСТ 16019-78; 17676-81);
3) характеристики возможных режимов работы и регламентных работ;
4) характеристику работы персонала.
Внешние воздействия на РЭС обычно записываются в ТЗ в сокращенном виде. Вместо перечисления большого количества разнообразных факторов указывается группа, категория или вид исполнения устройства. Перечень и числовые характеристики факторов приводятся в нормативных документах -ГОСТ, ОСТ, нормалях. Номенклатура, характеристики внешних воздействий и условий эксплуатации даны в ГОСТ 2057-406-81.
Говоря о климатических воздействиях, заметим, что нормировано семь основных видов:
1) воздействие температуры;
2) тепловые удары;
3) влажность;
4) разрежение воздуха;
5) пыль;
6) солнечная радиация;
7) гидростатическое давление.
Для специальных случаев отдельные основные виды воздействий дополняются усложненными требованиями. Например, действие влаги дополняется требованиями к туману, дождю, инею.
Нормальными климатическими условиями принято считать температуру от 15 до 300С, давление (8,36…10,6) 104 Па (630…800 мм рт.ст.), относительную влажность 45…80% (при 300С), воздух без химических примесей и пыли.
Учет содержания в атмосфере коррозионно-активных агентов, влияющих на надежность, производится по ГОСТ 15150-69.
Классификация атмосферы. Таблица 4.4.
| Тип атмосферы, наименование | Исполнение, обеспечивающее экономически оправданную защиту в атмосфере |
| I, условно чистая | У, УХЛ |
| II, промышленная | У, УХЛ, ТС, ТВ |
| III, морская | М, ТМ, ОМ, В |
| IV, приморско-промышленная | О, В |
В нормативных документах также устанавливаются факторы, характеризующие коррозионную агрессивность атмосферы (ГОСТ 9.039-74) и коррозионную стойкость металлов (ГОСТ 13819-68). Стойкость к воздействию биофакторов в тропиках определяют по ГОСТ 9.102-78.
Устойчивость к механическим воздействием РЭС - способность выполнять все функции в условиях воздействий; прочность при механических воздействиях - способность противостоять разрушению в течение срока службы. Существуют четыре вида механических воздействий: вибрации, удары, линейные и центробежные ускорения, шум и акустические удары.
В нормативных документах устанавливаются группы РЭС в зависимости от условий эксплуатации, требования к испытаниям, количественные оценки воздействия и т.д.
Группа в зависимости от условий эксплуатации.
Таблица4.5.
| Группа РЭА | Основные характеристики | ||||||||||
| Окружающая температура,К | Относительная влажность,% при 298 К | Удары | Вибрации | Линейные ускорения, м/с2 | Пониженное атмосферное давление Н, кПа | ||||||
| Тmin | Tmax | Длитель-ность tн, мс | Ускорение aи, м/с2 | Частота gи, мин-1 | Диапазон частот ¦н…¦в, Гц | Виброускоре-ние a, м/с2 | |||||
| Стационарная РЭА, работающая в отапливаемых помещениях (1-я группа) | ---- | ---- | ---- | 10….30 | 19,6 | ---- | |||||
| Стационарная РЭА, работающая на открытом воздухе (2-я группа) | ---- | ---- | ----- | 10….30 | 19,6 | ---- | |||||
| Возимая РЭА на транспорте 3-я и 5-я группы) | Автомобильный | 5….10 | 40….80 | 4….80 | 78,5 | 3,12 | |||||
| Гусеничный | 5….10 | 40….80 | 3….30 | 19,6 | ---- | ||||||
| Железнодорожный | 3….10 | 40….80 | 2….100 | 19,6 | 3,12 | ||||||
| Судовая РЭА (4-я группа) | Большие суда | 5….10 | 40….80 | 4….100 | 78,5 | ---- | |||||
| Малые суда | 5….10 | 40….80 | 5….150 | 58,9 | |||||||
| Носимая и портативная РЭА, работающая на открытом воздухе (6-я группа) | 5….10 | 40….80 | 10….70 | ---- | |||||||
| Носимая и портативная РЭА, работающая в отапливаемом помещении (7-я группа) | 5….10 | 40….80 | 10….30 | 10,7 | ---- | ||||||
| Самолетная РЭА, работающая в штатных условиях | 93….100 при Т=321…330К | 117,7 | ---- | 5….2000 | |||||||
| Самолетная РЭА, работающая в аварийных условиях | 98 при Т=313К | 5….10 | ---- | 10….70 | |||||||
| Ракетная РЭА Космическая РЭА | ---- | 10….12 ---- | ---- | 0….500 1,5…2500 | 196,2 4,9…58,9 | 0,12 |
Требования к испытаниям.
| Вид испытания | Наименование показателей | Нормы по группам | ||||||
| . | . | . | . | |||||
| Обнаружение диапазона | Диагональ часть ГЗУ, Олимп мм Выборы на мин. | |||||||
| Виброустой -чивость | Диапазон частот, Гц Ускорение g Выдержка | |||||||
| Ударная частота устойчивость | Длительность |
4.4. Требования к конструкции по надежности (ГОСТ 20397-82).
Группа требований по надежности РЭС является одной из основных, если не самой основной. Надежность является сложным свойством, которое, в зависимости от назначения конструкции и условий применения, состоит из сочетания свойств безотказности, долговечности, сохраняемости, ремонтопригодности (ГОСТ 27.002-83).
Из анализа видно, что первые три свойства основаны на противодействии разрушительным физико-химическим воздействиям, четвертое - на создание благоприятных условий для предупреждения и обнаружения причин отказов и их устранения.
Отказы конструкции, которые характеризуют безотказность, долговечность и сохраняемость, имеют общий физико-химический механизм. Требования, касающиеся этих составляющих надежности, рассматриваются в рамках следующих групп вопросов:
1) разновидности отказа;
2) три группы безотказности по последствиям отказов;
3) классы восстанавливаемости и периодичность режима эксплуатации;
4) требования сохраняемости при хранении и транспортировке.
Рассмотрим требование первой составляющей надежности конструкции РЭС - безотказности, которая характеризуется разновидностями отказов, отличающихся друг от друга моментом возникновения в течение срока службы изделия: отказами внезапными, износовыми и приработочными.
Точное прогнозирование и определение соответствующих требований надежности высоконадежной и сложной РЭС затруднено.
В зависимости от последствий отказа установлены три группы надежности (безотказности).
Группы надежности по последствиям. Таблица 4.6.
| Группа надежности | Последствия отказов | Пример |
| I | Угроза безопасности людей, значительный материальный или моральный ущерб | Сложная РЭС для судо- и самолетовождения, широковещательная или телевизионная станция |
| II | Материальный ущерб, соизмеримый со стоимостью изделия | Рыболокатор, РЭС спутника |
| III | Утрата изделия или расходы на ремонт | Бытовые РЭС |
Рассматривая и анализируя заявку на разработку, необходимо определить требования разновидности отказов и группу РЭС по надежности,.
Второй составляющей надежности является долговечность. Содержание понятия долговечности зависит от того, является ли рассматриваемая РЭС невосстанавливаемой, т.е. не подвергаемой ремонту , или восстанавливаемой, долговечность которой учитывает проведение ремонтов для восстановления работоспособности.
Для невосстанавливаемой РЭС долговечность определяется тремя главными факторами:
1) безотказностью;
2) качеством эксплуатационной конструкторской документации;
3) обученностью и дисциплиной обслуживающего персонала.
Для восстанавливаемой РЭС, кроме указанных трех факторов, должны учитываться и ремонтопригодность изделия.
Для формулировки требований ТЗ по надежности необходимо также установить класс восстанавливаемости РЭС. Существуют четыре класса:
1) невосстанавливаемые (неремонтируемые) изделия и их составные части: ИС и большинство ЭРЭ, корпусированные микросборки и т.д.;
2) восстанавливаемые изделия, которые после капитального ремонта должны рассматриваться как новые, а в течение срока службы подвергаются операциям технического обслуживания, текущего и среднего ремонта: вещательные РЭС;
3) восстанавливаемые изделия, которые после капитального ремонта имеют заниженные против новых образцов показатели надежности: рыбопоисковые локаторы и т.д.;
4) изделия для кратковременных заданий, выполнений которых обеспечивается готовностью изделия в начальный момент использования и безотказным функционированием за время выполнения задания: ракетная и космическая РЭС.
На априорном знании различных соотношений периодов ожидания и действия построена классификация периодичности режима эксплуатации: непрерывный, циклический, оперативный и общий режимы:
1) непрерывный - нет периода ожидания: радиобуй, спутниковые РЭС, РЭС дальней навигации и т.д.
2) циклический - известны периоды действия и ожидания: телевизионная передающие РЭС, промышленное телевидение, некоторые РЭС систем управления и др.
3) оперативный - неопределенный период ожидания и известный период действия: ракетные РЭС, некоторые связные РЭС и т.п.;
4) общий - случайные периоды ожидания и действия: телевизионные и радиоприемники, измерительные РЭС и т.д.
После установления требований к РЭС по режиму эксплуатации переходят к определению требований по сохраняемости РЭС.
Сохраняемость при хранении (на складе) закладывается конструктором на стадии разработки изделия (в основном, через безотказность), обеспечивается при выполнении назначенных конструктором требований к консервации и упаковке (ГОСТ 9.014073) в десятом подразделе ТЗ и поддерживается правильным, регламентированным режимом хранения, соответствующим категории размещения.
Сохраняемость при транспортировке обеспечивается в зависимости от назначенного вида транспорта путем применения соответствующей контейнерной тары с предусмотренными в ней амортизирующими средствами против вибрации, ударов соответствующих транспортированию. Возможно транспортирование автотранспортом, водным, железнодорожным и воздушным.
Ремонтопригодность представляет собой понятие, которое рассматривает приспособленность конструкции РЭС к ремонту с учетом обеспечения на объекте условий для ремонтных и профилактических работ без снятия изделия с объекта и с учетом дисциплины поддержания работоспособности изделия.
Оценивают количественно ремонтопригодность времени восстановления, т.е. временем, затрачиваемым на обнаружение, поиск причин и устранений последствий отказа. Для сложной РЭС время восстановления не должно превышать, как правило, 15…30 мин.
Для получения доступа к узлам РЭС могут использоваться приемы раскрытия или выдвигания частей несущей конструкции.
Показателем ремонтопригодности длительно эксплуатируемой РЭС являются характеристики ЗИП (запасные части, инструмент, принадлежности и материалы, прилагаемые к изделию): - достаточность; - комплектность; - сохранность.
Важное значение при обеспечение ремонтопригодности РЭС имеет полнота и комплектность эксплуатационной и ремонтной документации.
Дисциплина поддержания работоспособности РЭС определяет регламентированность операций технического обслуживания и ремонта. Различают назначенную и нерегламентированную периодичность.
Проанализировав заявку и проектную ситуацию для конкретной разработки РЭС, устанавливают соответствующие требования надежности в соответсующих подразделах технических требований ТЗ.
Контрольные вопросы по главе 4.
1. Классификация факторов окружающей среды.
2. Понятие климата.
3. Перечень климатических факторов.
4. Оценка воздействия климатических факторов на РЭС.
5. Понятия рабочих и предельных требований по климатическим факторам.
6. Климатическое исполнение РЭС.
7. Категории размещения РЭС на объекте.
8. Группы РЭС на летательных аппаратах.
9. Понятие эксплуатационных факторов.
10. Нормальные климатические условия.
11. Группы РЭС по условиям эксплуатации.
12. Оценка показателей надежности РЭС.
13. Группы надежности РЭС по последствиям.
14. Требования долговечности и их обеспечение для восстанавливаемых и невосстанавливаемых РЭС.
15. Требование сохраняемости и их обеспечение.
16. Требования ремонтопригодности и их обеспечение.
Глава 5. ФАКТОРЫ ВЗАИМОДЕЙСТВИЯ "ЧЕЛОВЕК-МАШИНА".
В настоящем разделе рассматривается особая группа факторов влияющих на процесс и результат проектирования РЭС. Особенность состоит в том, что воздействия определяются совершенно особым субъектом деятельности при проектировании - человеком.
Для начала необходимо определить роль и место человека в жизни РЭС. Для решения этого вопроса рассмотрим с общих позиций ситуацию: будем считать, что речь идет о роли человека при взаимодействии с какой-либо машиной, т.е. определим роль человека - оператора в человеко-машинной системе при выполнении управленческой деятельности.
5.1. Человек - оператор и РЭС.
Человек - оператор является интегральным и определяющим звеном любой системы управления, независимо от степени ее автоматизации. Им принимаются принципиальные решения, он является юридическим лицом. Все это заставляет внимательно подходить к вопросам работы человека с РЭС, изучать и рационально использовать его навыки и способности, создавать для него комфортные условия для работы.
5.1.1. Система "Человек - машина"
В соответствии с ГОСТ 21033-75 человека - оператора (Ч-О) рассматривают как осуществляющего трудовую деятельность посредством взаимодействия с машиной и окружающей средой. Эта система получила наименование "Человек-машина".
В настоящее время считают, что машине следует отдавать предпочтение при выработке частных решений на основе общих правил, при математических расчетах по определенным формулам, при выполнении стандартных действий, при необходимости сохранения в оперативной памяти большого количества информации, при быстрых реакциях и значительных усилиях в процессе управления.
Если необходимо делать обобщения или формировать решение на основе ограниченной информации, опознать объект в условиях помех, реагировать на случайные и непредвиденные обстоятельства, решать задачи, которые по своему характеру не могут быть алгоритмизированы, то предпочтение отдается человеку.
Для правильного использования человека в роли "машины" управления мало знать перечисленные выше общие принципы. Необходимо знать и конкретные особенности работы человека в различных условиях. Эти условия определяются инженерной психологией и принципами эстетического восприятия человеком информации, получаемой при работе с РЭС.
5.1.2. Оператор как "приемник", "ретранслятор" и "анализатор" информации.
Инженерная психология - наука, рассматривающая Ч-О в виде машины по приему, переработке и выработке информации в виде сигналов разнообразной физической природы. Она изучает:
- сенсорный вход (органы чувств или рецепторы человека) и моторный (двигательный) выход Ч-О;
- процессы переработки информации и распределением функций между человеком-оператором и машиной;
- нормальные и критические условия жизнедеятельности Ч-О;
Ч-О и РЭС представляет собой две части комплекса, для нормальной работы которого необходимо их согласование. Поэтому между ними имеется целая система технических устройств, передающих информацию от РЭС к человеку и наоборот. Для действенности этой системы нужно решить вопросы: какое количество информации человек может принять, переработать и передать в единицу времени; какова его "пропускная способность" и предельные скорости различных реакций; какова точность восприятия и выдачи различных сигналов; каково время "задержки" (обработки) сигнала оператором; какова надежность его работы. Все эти вопросы должны решаться под углом зрения "подгонки" РЭС к оператору, а не наоборот.
Сложность решения этих вопросов объясняется тем, что прием и переработка информации Ч-О - процессы познавательные, складывающиеся из ощущения, восприятия, представления и мышления.
Рассмотрим, как происходит процесс управления РЭС:
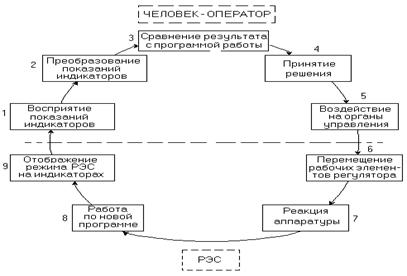
Рис.5.1. Последовательность стадий управления.
Из рассмотрения процесса управления в системе видно, что Ч-О может выступать в роли "приемника" информации, "ретранслятора" информации от одного звена к другому, "анализатора" информации и исполнителя принятого решения. Он может выполнять программирование работы РЭС, следить за ее состоянием, или быть только исполнителем команд.
Во всех случаях основным показателем его работы будут:
- время полного цикла регулирования;
- точность и надежность работы.
Время полного цикла регулирования (оборота сигнала по контуру Ч-О - РЭС) можно представить в виде суммы:
 |
| где ti - время задержки сигнала в i звене системе РЭС; |
| n - общее количество звеньев; |
| Т0 - время задержки сигнала оператором (от момента поступления сигнала до ответа на него действием) |
Величина То лежит в пределах 0,1…0,5 с и более, в то время как åti обычно на 2…3 порядка меньше.
Время от подачи сигнала до начала движения зависит от модальности ощущения, определяемой возбуждаемым анализатором. Значения этих величин для возбуждения средней интенсивности лежат в пределах:
- тактильный анализатор - 0,09…0,22с,
- слуховой анализатор - 0,12…0,18с,
- зрительный анализатор - 0,15…0,22с,
- обонятельный анализатор - 0,31…0,39с,
- болевой анализатор - 0,13…0,89с.
Поэтому общее время, затрачиваемое оператором на получение информации от индикаторов и выполнение ответных действий Т0 , можно представить в виде:
 |
где К - количество индикаторов (стрелок, знаков);
время, необходимое для оценки показателей i-го индикатора;
Dti - время перевода глаз с одного индикатора на другой;
Dti - время спонтанной (самопроизвольной) отвлекаемости Ч-О;
tc - время выполнения моторных (простых) действий по управлению i-м регулятором;
tmi - количество регуляторов РЭС;
ni - количество однотипных индикаторов или периодичность наблюдения или регулировки.
Для работы с РЭС наиболее характерны дизъюнктивные реакции (реакции выбора) оператора, которые характеризуется необходимостью отвечать действием только на некоторые из сигналов. Длительность таких реакций больше, чем у простых сенсомоторных.
Время обращения сигнала по контуру управления можно сократить, если создать оператору нормальные условия работы и натренировать его на управление данным РЭС.
5.1.3. Повышение надежности работы Ч-О.
 |
Суммарные погрешности в системе "Человек-машина" в инженерной психологии принято суммировать так:
где di - погрешность i-го звена РЭС,
n - число звеньев,
D - суммарная погрешность работы оператора.
Здесь величина D в несколько раз выше Sdi2. Поэтому самым радикальным путем уменьшения ошибок работы системы является уменьшение погрешности работы оператора.
Максимальная точность работы оператора соответствуют оптимальному темпу работы, уменьшение или увеличение которого приводит к увеличению числа ошибок. Психологи установили, что оптимальным темпом является подача оператору информации в пределах 0,5…5 бит/с. При уменьшении количества информации оператор "засыпает", а при увеличении сначала наблюдается пропуск сигналов, затем задержка в передаче сигнала, затем полная потеря возможности нормальной работы.
Эффективным средством повышения точности работы является введение дополнительных контуров управления, которые дают информацию о показателях, сопутствующих выходному параметру системы. Это позволяет предвидеть изменения конечного результата работы заранее и обеспечить более высокую точность и скорость регулировки.
Повышение точности и надежности работы может быть получено при параллельной работе двух операторов. В этом случае в контур управления вводится устройство, которое пропускает управляющие сигналы в систему только при их полной идентичности. Ошибка возможна только при ее появлении одновременно у двух операторов. При этом число ошибок сокращается в сотни раз.
Большое значение имеют конструкции индикаторных устройств, особенно шкал. Наилучшей шкалой для чтения является круглая, самой плохой - линейная.
На скорость обработки информации влияет характер считывания информации. Если информация в виде команды, внимание оператора направлено на то, чтобы правильно принять и исполнить команду. Если информация осведомительного характера, то оператор будет отмечать только важные для него сигналы. При ситуационной информации оператор работает намного точнее и быстрее, чем при получении командной.
Существенное повышение надежности работы дает учет психофизиологических факторов, создание оператору комфортных условий работы. Важна тренировка оператора, представление ему возможности смены способов работы, ликвидация различных помех (шум, вибрация, блики и т.п.).
5.2. Формирование и прием сигналов управления.
5.2.1. Факторы, учитываемые при конструировании органов управления.
Управляющие сигналы могут вводиться Ч-О различными способами: изменением положения регуляторов, изменением электрических потенциалов отдельных характерных точек тела, проявлением физиологической активности (пульс, частота дыхания и т.п. - в телеметрических системах) или голосом.
В настоящее время созданы устройства, использующие биотоки для управления, сделан ряд телеметрических систем для контроля физиологического состояния человека, "понимающие" речевые команды. Но наиболее распространены устройства ввода команд ручками, рычагами, клавишами, педалями.
Ч-О является разумным, экономичным и гибким источником малых энергий. Нельзя пренебрегать его двигательными навыками, т.к. можно при этом объединить человеческие возможности по выработке сигналов управления.
Существуют два правила инженерной психологии:
1) нельзя пренебрегать двигательными навыками человека;
2) усилия, прилагаемые к регуляторам, должны соответствовать характеру действия регулятора.
Известно, что максимальный эффект управления самолетом или автомобилем достигается тогда, когда у пилота или шофера имеется так называемое чувство ручки, т.к. только в этом случае человек может соотносить усилия, прикладываемые к ручке с выполняемым маневром. Попытки сделать управление кнопочным дает худшие результаты, т.к. для любого управления необходим определенной расход мышечной энергии.
По характеру взаимодействия различают четы
Дата добавления: 2017-01-26; просмотров: 4237;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
