Классификация по характеристикам управления
Классификация по характеру динамических процессов в системе
По виду сигналов, протекающих по контуру системы, САУ бывают:
непрерывные - это такие системы, в которых во всех звеньях непрерывному во времени входному сигналу соответствует непрерывный во времени выходной сигнал. Для того чтобы система была непрерывная, необходимо наличие непрерывных статических характеристик системы.
дискретные САУ- это такие системы, в которых хотя бы в одном звене непрерывному входному сигналу соответствует дискретный выходной сигнал (или импульс). К дискретным системам, как разновидность, относятся цифровые САУ, в которых функции регулятора выполняет цифровое устройство, а выходная величина представляет собой цифры.
релейные САУ (системы релейного действия) - это системы, в которых хотя бы в одном звене непрерывной входной величине соответствует выходная величина, изменяющаяся скачком. Статическая характеристика релейных систем имеет точку разрыва.
По виду дифференциальных уравнений:
Линейные
А) Обыкновенные линейные системы (с сосредоточенными параметрами) – это такие системы, в которых в каждом из звеньев динамические процессы описываются обыкновенными линейными уравнениями. Статическая характеристика таких систем имеет линейный вид.
Б) Особые линейные системы, среди которых различают:
линейные САУ с распределенными (в пространстве) параметрами - это такие САУ, динамика которых описывается частными производными, например, сушильные барабаны, флотомашины и другие установки, в которых процессы преобразования энергии и вещества происходят по всей длине аппарата.
линейные системы с запаздыванием - это такие САУ, в которых присутствует хотя бы одно звено чистого запаздывания (непрерывному входному сигналу соответствует непрерывный выходной сигнал, сдвинутый по времени на t, где t - время запаздывания).
Нелинейные системы - это такие САУ, в которых хотя бы одно звено описывается нелинейным уравнением или имеется нелинейность иного вида, такая как произведение двух переменных, квадратный корень, степень и др.
Среди нелинейных систем также выделяют особые нелинейные системы:
1. нелинейные системы с распределенными параметрами;
2. нелинейные системы с чистым запаздыванием;
К нелинейным системам относятся релейные системы.
По условиям функционирования:
· Стационарные – системы, параметры которых не изменяются во времени.
· Нестационарные.
Классификация по характеристикам управления
По принципу управления:
а) САУ с разомкнутой цепью воздействий. Разомкнутые системы можно разделить в свою очередь на два класса: системы, осуществляющие управление в соответствии с изменением только задающего воздействия и системы, управляющие при изменении возмущения.
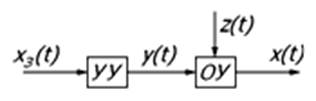
Алгоритм управления разомкнутой системы первого типа имеет вид:
Чаще всего оператор Ау устанавливает пропорциональную связь между задающим воздействием хз(t) и управляющим воздействием y(t), а сама система в этом случае осуществляет программное управление.
Достоинства: 1) простота, высокая надежность;
2) высокое быстродействие.
Недостатки: 1) отсутствие противодействия возмущению;
2) необходимость точной модели объекта.
Область применения системы: простые объекты, неподверженные существенным возмущениям с повышенными требованиями к надежности или быстродействию.
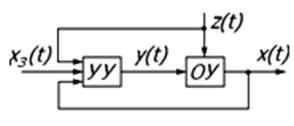
Система управления по возмущению – это такая система, в которой для уменьшения отклонения управляемой величины от заданной измеряется возмущающее воздействие, обрабатывается по определенному алгоритму и накладывается на прежний управляющий сигнал.
В системах управления по возмущению управляющее воздействие зависит от возмущающего и задающего воздействий:
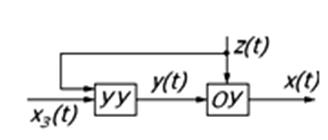
причем в большинстве случаев оператор Ау может быть разделен на две не зависящие друг от друга составляющие:

Оператор Аз соответствует, как правило, простому пропорциональному преобразованию сигнала хз(t), а оператор Ав может быть и более сложным, например, устанавливающим нелинейное соотношение между сигналами ув(t) и z(t).
В большинстве случаев разомкнутые системы управления по возмущению выполняют функции стабилизации управляемой величины.
Преимущество разомкнутых систем управления по возмущению – их быстродействие: они компенсируют влияние возмущения еще до того, как оно появится на выходе объекта. Но применимы эти системы лишь в том случае, если на управляемую величину действует одно или два возмущения и есть возможность измерения этих возмущений.
Достоинства: 1) возможность работы при наличии возмущений; 2) высокое быстродействие.
Недостатки: 1) относительная сложность; 2) необходимость точной модели объекта, в том числе по каналу возмущения.
Условия применения: 1) возможность измерения возмущающего воздействия; 2) наличие модели объекта по каналу возмущения.
б) САУ с замкнутой цепью воздействий. Система управления по отклонению.
Управляющее воздействие в замкнутой системе формируется в большинстве случаев в зависимости от величины и знака отклонения истинного значения управляемой величины от ее заданного значения:
где  - сигнал ошибки (называемый также сигналом рассогласования).
- сигнал ошибки (называемый также сигналом рассогласования).
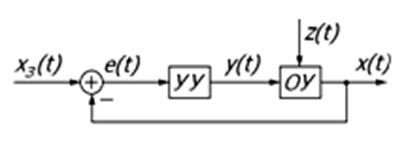
В замкнутой системе контролируется непосредственно управляемая величина и тем самым при выработке управляющих воздействий учитывается действие всех возмущений, влияющих на управляемую величину. В этом заключается преимущество замкнутых систем.
Но вначале возмущение должно проявиться на выходе, система «почувствует» отклонение и лишь потом выработает управляющие воздействия, направленные на устранение отклонения. Несмотря на наличие определенных недостатков, этот принцип широко применяют при создании автоматических систем.
Во всех замкнутых системах существуют обратные связи, которые подразделяются на жесткие обратные связи и гибкие обратные связи. Жесткие обратные связи – это такие связи, в которых обратный сигнал существует как в динамическом, так и в статическом режиме. Гибкие обратные связи – связи, в которых сигнал обратной связи существует только в динамическом режиме.
Достоинства: 1) уверенная работа при наличии существенных возмущений; 2) нет острой необходимости в точной модели объекта.
Недостатки: 1) относительная сложность; 2) сниженное быстродействие.
Область применения системы: почти любые объекты, кроме случаев невозможности измерения результата управления.
в) В комбинированных системах создают две цепи воздействий – по заданию и рассогласованию или по рассогласованию и возмущению, и управляющее воздействие формируется согласно оператору
 или
или 
Эффективность работы комбинированной системы управления всегда больше, чем у порознь функционирующих замкнутой или разомкнутой систем.
По режимам функционирования
В зависимости от характера изменения задающего воздействия во времени автоматические системы управления разделяются на следующие классы:
а) Стабилизирующая автоматическая система управления (система стабилизации) – это система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянным:

б) Алгоритм функционирования программной автоматической системы содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией времени f(t):
в) Следящая автоматическая система управления предназначена для изменения управляемой величины в соответствии с изменениями другой величины, которая действует на входе системы и закон изменения которой заранее не известен:
 ,
,
Следящие системы используют обычно для дистанционного управления перемещением объектов в пространстве.
По свойствам системы в установившемся режиме:
а) Статические системы - это такие системы, в которых управляемая величина в установившемся режиме зависит от величины возмущающего воздействия, в них при заданном воздействии, которое стремится к постоянному, отклонение управляемой величины также стремится к постоянной величине, отличной от нуля.
б) Астатические системы - это такие системы, в которых управляемая величина в установившемся режиме не зависит от величины возмущающего воздействия, в них отклонение управляемой величины при любом постоянном задающем воздействии стремится к нулю.
2.3 Классификация САУ по другим признакам
По усилению мощности сигнала:
а) САУ прямого действия- это такая САУ, в которой используется энергия управляемого объекта.
б) САУ непрямого действия - это САУ, в которых управляющий сигнал создаётся дополнительным усилительным устройством.
По количеству контуров в системе:
а) одноконтурныеСАУ – системы, в которых существует только одна главная обратная связь.
б) многоконтурныеСАУ – системы, в которых помимо обратной главной связи существуют местные обратные связи.
По связности системы:
а) односвязные САУ - это САУ, в которых присутствует либо один регулятор, либо несколько регуляторов, взаимодействие которых учитывается в законе управления.
б) многосвязные САУ - это САУ, в которых присутствует несколько регуляторов независимых друг от друга.
По размерности системы:
а) одномерные САУ – системы, в которых существует один управляющий сигнал и одна управляемая величина.
б) многомерные САУ – системы, в которых количество управляемых величин и управляющих сигналов превышает единицу
3. Функциональная и структурная схемы САУ
Упрощенное графическое изображение любой структуры автоматической системы, содержащее условное изображение ее частей, называют структурной схемой. Различаютфункциональные и алгоритмические структурные схемы.
Функциональные и алгоритмические схемы состоят из условных изображений элементов (звеньев) (обычно в виде прямоугольников) и различных связей, изображаемых в виде линий со стрелками, показывающих направление передачи воздействия. Каждая линия соответствует обычно одному сигналу или одному воздействию. Иногда применяют жирные или сдвоенные линии: в функциональных – для обозначения материальных и энергетических потоков, в алгоритмических - для обозначения векторных величин. Около каждой линии указывают физическую величину, характеризующую данное воздействие.
Обычно вначале составляют функциональную схему системы, а затем – алгоритмическую. Схемы могут быть составлены с большей или меньшей степенью детализации. Схемы, на которых показаны лишь главные или укрупненные части системы, называют обобщенными.
В большинстве случаев функциональная схема САУ содержит следующие основные устройства:
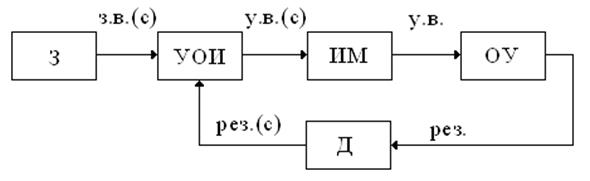
Устройство обработки информации (УОИ) – устройство, которое на основе анализа сигналов о желаемом и действительном результатом воздействия формирует управляющее воздействие в виде сигнала.
Исполнительный механизм (ИМ) – устройство, непосредственно воздействующее на объект управления с целью реализации управляющего воздействия.
Задатчик (З) – устройство, которое является источником информации о задании на управление, желаемом его результате.
Датчик (Д) – источник информации о фактическом результате управления.
Под структурной схемой САУ понимают обычно алгоритмическую. Алгоритмическая структурная схема в отличие от функциональной показывает математическое описание отдельных блоков и позволяет проводить математический анализ системы управления и синтез отдельных ее элементов.
Структурная схема линейной непрерывной САУ может включать в себя следующие элементы:
| № | Наименование элемента | Обозначение | Уравнение движения |
| 1. | Линейный блок/ Линейное звено | 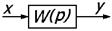
| 
|
| 2. | Узел разветвления | 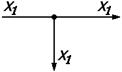
| — |
| 3. | Сумматор | 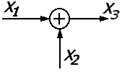
| 
|
| 3а. | Элемент сравнения | 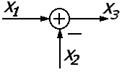
| 
|
1) Линейный блок/линейное звено – элемент структурной схемы САУ, передающий на единственный выход сигнал с единственного входа, преобразованный в соответствии с передаточной функцией звена W(p).
2) Узел – элемент структурной схемы САУ, мгновенно передающий сигнал с единственного входа на все свои выходы.
3) Сумматор/элемент сравнения – элемент структурной схемы, мгновенно передающий на единственный выход сумму/разность сигналов на всех своих входах.
4. Статическая характеристика САУ
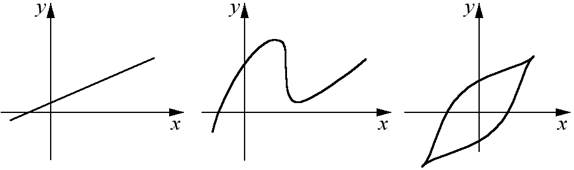
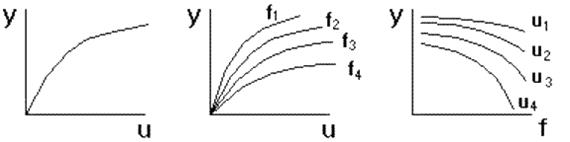
Режим работы САУ, в котором управляемая величина и все промежуточные величины не изменяются во времени, называется установившимся, или статическим режимом. Любое звено и САУ в целом в данном режиме описывается уравнениями статики вида y = F(u,f), в которых отсутствует время t. Соответствующие им графики называются статическими характеристиками. Статическая характеристика звена с одним входом u может быть представлена кривой y = F(u) . Если звено имеет второй вход по возмущению f, то статическая характеристика задается семейством кривых y = F(u) при различных значениях f, или y = F(f) при различных u.
Так примером одного из функциональных звеньев системы регулирования является рычаг. Уравнение статики для него имеет вид y = Ku. Его можно изобразить звеном, функцией которого является усиление (или ослабление) входного сигнала в K раз. Коэффициент K = y/u, равный отношению выходной величины к входной называется коэффициентом усиления звена. Когда входная и выходная величины имеют разную природу, его называют коэффициентом передачи.
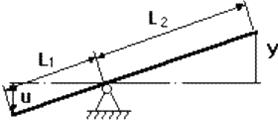
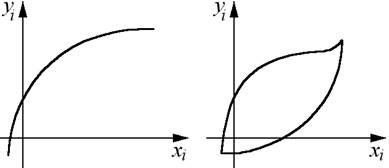
Статическая характеристика данного звена имеет вид отрезка прямой линии с наклоном a = arctg(L2/L1) = arctg(K) . Звенья с линейными статическими характеристиками называются линейными. Статические характеристики реальных звеньев, как правило, нелинейны. Такие звенья называются нелинейными. Для них характерна зависимость коэффициента передачи от величины входного сигнала: K = y/u ≠ const.
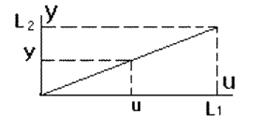
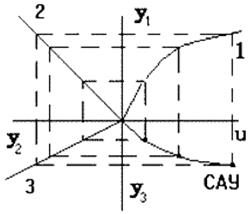
Например, статическая характеристика насыщенного генератора постоянного тока представлена на рисунке. Обычно нелинейная характеристика не может быть выражена какой-либо математической зависимостью и ее приходится задавать таблично или графически.
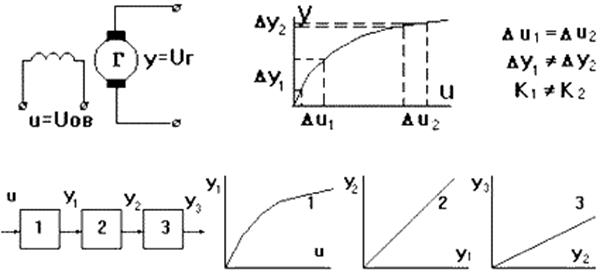
Зная статические характеристики отдельных звеньев, можно построить статическую характеристику САУ (см. рис.). Если все звенья САУ линейные, то САУ имеет линейную статическую характеристику и называется линейной. Если хотя бы одно звено нелинейное, то САУ нелинейная.
Звенья, для которых можно задать статическую характеристику в виде жесткой функциональной зависимости выходной величины от входной, называются статическими. Если такая связь отсутствует и каждому значению входной величины соответствует множество значений выходной величины, то такое звено называется астатическим. Примером астатического звена может служить двигатель, входной величиной которого является напряжение U, а выходной - угол поворота вала, величина которого при U = const может принимать любые значения. Выходная величина астатического звена даже в установившемся режиме является функцией времени.
5. Уравнение движения и передаточная функция
Система автоматического управления может быть полностью описана дифференциальным уравнением, т.н. уравнением движения, устанавливающим связь между входной и выходной величинами как в переходных, так и в установившихся режимах:

где  - входные величины элемента,
- входные величины элемента,  - выходная величина элемента,
- выходная величина элемента,  - коэффициенты уравнения, называемые параметрами.
- коэффициенты уравнения, называемые параметрами.
Уравнение движения может быть записано в более короткой символической (операторной) форме. Переход к этой форме осуществляют введением сокращенного условного обозначения операции дифференцирования:  , где p – дифференциальный оператор. Соответственно k-тую производную обозначают
, где p – дифференциальный оператор. Соответственно k-тую производную обозначают  . Тогда исходное уравнение можно записать в виде:
. Тогда исходное уравнение можно записать в виде:

или:

Введем обозначения:  – дифференциальный оператор при выходной величине, наз. собственным, или характеристическим оператором. Название обусловлено тем, что многочлен характеризует собственное движение элемента, т.е. движение при отсутствии внешних воздействий.
– дифференциальный оператор при выходной величине, наз. собственным, или характеристическим оператором. Название обусловлено тем, что многочлен характеризует собственное движение элемента, т.е. движение при отсутствии внешних воздействий.  и
и  – дифференциальные операторы при входных величинах, наз. операторами воздействия, операторами входа. Тогда
– дифференциальные операторы при входных величинах, наз. операторами воздействия, операторами входа. Тогда

Другая форма записи дифференциальных уравнений основана на применении преобразования Лапласа. Применим преобразование Лапласа к дифференциальному уравнению, считая, что до приложения внешнего воздействия система находилась в покое и все начальные условия равны нулю. Получим:

Сравнивая с уравнением в символической форме, замечаем их полную аналогию. Разница только в значении символа р: в одном случае это операция дифференцирования, в другом – комплексное число.
Передаточной функцией W(p) называют отношение изображения выходной величины к изображению входной величины при нулевых начальных условиях:
Передаточная функция также равна отношению входного оператора к собственному оператору:

Как видно, передаточная функция представляет собой некоторый динамический оператор, характеризующий прохождение сигналов через линейный элемент.
Часто рассматривают передаточную функцию по управлению
и передаточную функцию по возмущению
Для реальных элементов, описываемых обыкновенными дифференциальными уравнениями, передаточная функция представляет собой правильную рациональную дробь

у которой степень многочлена числителя меньше или равна степени многочлена знаменателя, т.е.  . Все коэффициенты передаточной функции – действительные числа, характеризующие параметры элемента.
. Все коэффициенты передаточной функции – действительные числа, характеризующие параметры элемента.
Для элементов, описываемых передаточной функцией невысокого порядка (n < 3), принято записывать передаточную функцию в стандартной форме. При этом передаточную функцию преобразовывают таким образом, чтобы свободный член знаменателя  был равен единице. При этом свободный член числителя
был равен единице. При этом свободный член числителя  становится равным передаточному коэффициенту и его выносят за скобки:
становится равным передаточному коэффициенту и его выносят за скобки:
 , где
, где 
Передаточная функция является функцией комплексной переменной  , которая может при некоторых значениях переменной р обращаться в ноль или бесконечность. Значение переменной р, при котором передаточная функция обращается в ноль, называют нулём, а значение, при котором обращается в бесконечность – полюсом передаточной функции. Очевидно, что нулями передаточной функции являются корни полинома
, которая может при некоторых значениях переменной р обращаться в ноль или бесконечность. Значение переменной р, при котором передаточная функция обращается в ноль, называют нулём, а значение, при котором обращается в бесконечность – полюсом передаточной функции. Очевидно, что нулями передаточной функции являются корни полинома  , а полюсами - корни полинома
, а полюсами - корни полинома  .
.
6. Типовые воздействия и временные характеристики САУ
Классификация динамических звеньев производится по виду дифференциального уравнения, описывающего поведение звена в динамических режимах работы САУ. Однако вид дифференциального уравнения не является единственным признаком, по которому проводится сравнение динамических звеньев. Для этого используются следующие характеристики:
· Дифференциальные уравнения движения динамического звена.
· Передаточные функции W(p);
· Временные характеристики, к которым относятся:
o переходная функция или переходная характеристика h(t),
o импульсная передаточная функция или функция веса w(t),
· Частотные характеристики, к которым относятся:
o амплитудно-частотные характеристики, в т.ч. логарифмические,
o фазочастотные характеристики, в т.ч. логарифмические,
o амлитудно-фазовые частотные характеристики.
Дифференциальные уравнения движения динамического звена и его передаточные функции рассмотрены в предыдущем разделе.
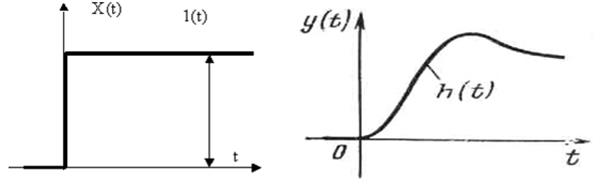
Временные характеристики определяют вид изменения выходного сигнала при подаче на вход звена типового управляющего воздействия. Это позволяет сравнивать свойства звеньев в динамических режимах работы. Временные свойства звена определяются его переходной и импульсной переходной характеристиками.
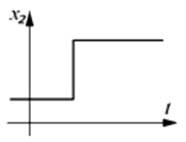
Переходная функция или переходная характеристика h(t) представляет собой переходный процесс на выходе звена, возникающий при подаче на его вход скачкообразного воздействия при величине скачка, равного единице. Такое воздействие называется единичной ступенчатой функцией и обозначается
X(t) = 1(t),
что соответствует следующим условиям:
Изображение единичной ступенчатой функции определяется как

Чтобы определить изображение переходной функции при известной передаточной функции звена W(s) необходимо выполнить следующую операцию:

Ступенчатая функция представляет собой распространенный вид входного воздействия в САУ. К такому виду воздействия сводятся возрастание момента на валу двигателя, мгновенное изменение задания на частоту вращения двигателя.
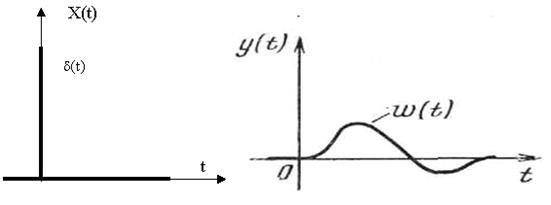
Функция веса или импульсная переходная характеристика представляет собой реакцию звена на единичную импульсную функцию. Единичная импульсная функция, или  -функция, представляет собой производную от единичной ступенчатой функции. То есть
-функция, представляет собой производную от единичной ступенчатой функции. То есть
Дельта-функция тождественно равна нулю во всех точках, кроме t=0, где она стремится к бесконечности.
Основное свойство дельта-функции состоит в том, что

то есть она имеет единичную площадь.
Нетрудно установить, что изображение дельта-функции определяется как

Изображение функции веса определяется как:

Очевидно, что изображение импульсной переходной характеристики совпадает с передаточной функцией звена или САУ.
Зная переходную или весовую функцию САУ, можно определить реакцию системы на произвольное входное воздействие при нулевых начальных условиях с помощью следующих формул:
 ,
, 
Две рассмотренные формулы легко получаются друг из друга, являясь вариантами интеграла Дюамеля, или интеграла свертки. Для реальных инерционных звеньев реакция на выходе всегда отстает от входного воздействия, т.е.  .
.
7. Частотные характеристики САУ
Частотные характеристики описывают передаточные свойства элементов и систем в режиме установившихся гармонических колебаний, вызванных внешним гармоническим воздействием. Зная частотную характеристику элемента, можно определить реакцию элемента на гармоническое воздействие любой частоты, а также на сумму гармонических воздействий различной частоты. Частотные характеристики широко используются в теории и практике автоматического управления, так как реальные возмущения, действующие на автоматические системы, могут быть представлены как сумма гармонических сигналов.
Пусть на вход линейного элемента в момент времени t = 0 подано гармоническое воздействие определенной частоты w.
Через некоторое время, необходимое для протекания переходного процесса, элемент войдет в режим установившихся вынужденных колебаний, а выходная величина y(t) будет изменяться по гармоническому закону с той же частотой w , но с отличающейся амплитудой ym и со сдвигом  по оси времени
по оси времени

где  – период колебаний;
– период колебаний;  – фазовый сдвиг между входным и выходным сигналами.
– фазовый сдвиг между входным и выходным сигналами.
Повторяя такой эксперимент при фиксированном  для различных значений частоты (от 0 до
для различных значений частоты (от 0 до  ), можно установить, что амплитуда
), можно установить, что амплитуда  и фазовый сдвиг
и фазовый сдвиг  выходного сигнала конкретного элемента зависят от частоты воздействия.
выходного сигнала конкретного элемента зависят от частоты воздействия.
Подавая гармоническое воздействие на вход различных элементов, можно убедиться, что величины и  зависят также от типа и параметров элемента.
зависят также от типа и параметров элемента.
Так как амплитуда выходного сигнала зависит ещё от амплитуды входного сигнала, то целесообразно при описании передаточных свойств элементов рассматривать отношение амплитуд  .
.
Зависимость отношения амплитуд выходного и входного сигнала от частоты называют амплитудной частотной характеристикой (сокращенно - АЧХ) и обозначают А(w) (см. рис. а). Зависимость фазового сдвига между входным и выходным сигналами от частоты называют фазовой частотной характеристикой (ФЧХ) и обозначают j(w) (см. рис. б). Аналитические выражения А(w) и j(w) называют соответственно амплитудной и фазовой частотными функциями.
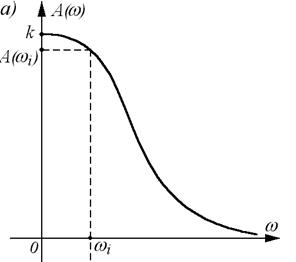
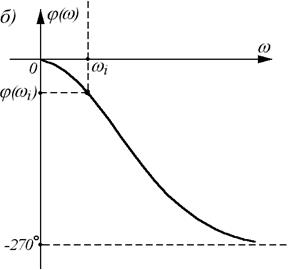
АЧХ показывает, как элемент пропускает сигналы различной частоты. Оценка пропускания производится по отношению амплитуд  в установившемся режиме. АЧХ имеет размерность, равную отношению размерности выходной величины к размерности входной. ФЧХ показывает, какое отставание или опережение выходного сигнала по фазе создает элемент при различных частотах в установившемся режиме.
в установившемся режиме. АЧХ имеет размерность, равную отношению размерности выходной величины к размерности входной. ФЧХ показывает, какое отставание или опережение выходного сигнала по фазе создает элемент при различных частотах в установившемся режиме.
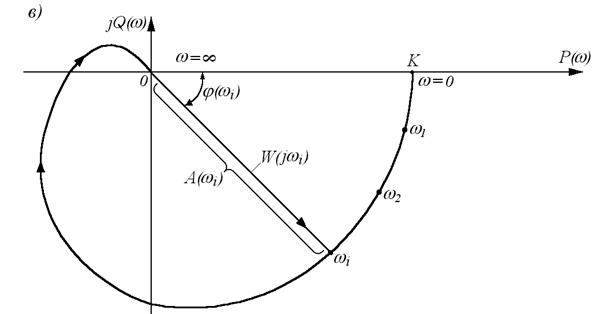
Амплитудную и фазовую частотные характеристики можно объединить в одну общую – амплитудно-фазовую частотную характеристику (АФЧХ или АФХ). Амплитудно-фазовая частотная характеристикаW(jw) представляет собой функцию комплексного переменного jw, модуль которой равен А(w), а аргумент равен j(w). Каждому фиксированному значению частоты wi соответствует комплексное число W(jwi), которое на комплексной плоскости можно изобразить вектором, имеющим длину А(wi) и угол поворота j(wi) (см. рис. в). Отрицательные значения j(w), соответствующие отставанию выходного сигнала от входного, принято отсчитывать по часовой стрелке от положительного направления действительной оси.
При изменении частоты от нуля до бесконечности вектор W(jw) поворачивается вокруг начала координат, при этом одновременно увеличивается или уменьшается длина вектора. Кривая, которую при этом опишет конец вектора, называемая годографом, и есть АФЧХ. Каждой точке характеристики соответствует определенное значение частоты.
Проекции вектора W(jw) на действительную и мнимую оси называют соответственно действительной и мнимой частотными характеристиками и обозначают

При этом, действительная частотная характеристика Р(w) – всегда четная, а мнимая характеристика Q(w) – всегда нечетная функции частоты.
Аналитическое выражение для АФЧХ конкретного элемента можно получить из его передаточной функции путем подстановки р=jw:
АФЧХ W(jw), как и любая комплексная величина, может быть представлена в показательной форме
где А(w) – модуль АФЧХ, а j(w) – угол сдвига по фазе; алгебраической

или тригонометрической

Связь между различными частотными функциями следующая:
Выделение действительной и мнимой составляющих частотной передаточной функции  возможно с помощью следующих формул:
возможно с помощью следующих формул:
где a(w) – действительная часть числителя функции W(jw), b(w) – мнимая часть числителя, c(w) – действительная часть знаменателя, d(w) – мнимая часть знаменателя
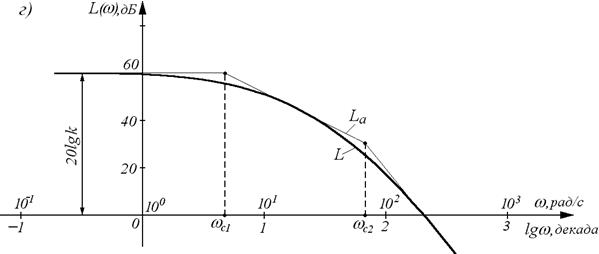
При практических расчетах автоматических систем удобно использовать частотные характеристики, построенные в логарифмической системе координат. Такие характеристики называют логарифмическими. Они имеют меньшую кривизну и поэтому могут быть приближенно заменены ломаными линиями, составленными из нескольких прямолинейных отрезков.
За единицу длины по оси частот логарифмических характеристик принимают декаду. Декада – интервал частот, заключенный между произвольным значением wi и его десятикратным значением 10wi. Отрезок логарифмической оси частот, соответствующий одной декаде, равен 1. При построении ЛЧХ по оси абсцисс откладывают логарифм частоты, а подписывают соответствующие значения частот. Ось ординат проводят через произвольную точку.
Обычно в расчетах используют логарифмическую амплитудную частотную характеристику (ЛАЧХ)

ординаты которой измеряют в логарифмических единицах – белах (Б) или децибелах (дБ).
При построении фазовой частотной характеристики логарифмический масштаб применяют только для оси абсцисс.
На рис. г показаны ЛАЧХ L(w) (толстая линия) и соответствующая ей приближенная (асимптотическая) характеристика Lа(w) в виде прямолинейных отрезков (тонкая линия). Частоты, соответствующие точкам стыковки отрезков, называют сопрягающими и обозначают wс.
8. Позиционные звенья САУ
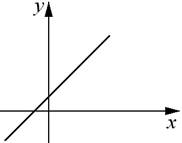
8.1 Безынерционное звено
Является простейшим среди всех типовых звеньев, безынерционное звено передает сигнал со входа на выход мгновенно, без искажения его формы. В звене может происходить только усиление или ослабление мгновенных значений входной величины. Связь между мгновенными значениями входной и выходной величин описываются алгебраическим уравнением движения
 ;
;
k – коэффициент усиления или передачи звена характеризует наклон статической характеристики.
Уравнение движения звена в операторной форме
 ,
,
отсюда передаточная функция
 .
.
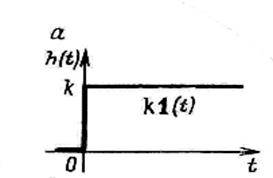
При единичном ступенчатом воздействии  , приложенном в момент времени t = 0, выходная величина мгновенно изменяется и принимает значение k. Переходная функция звена (см. рис. а) имеет вид
, приложенном в момент времени t = 0, выходная величина мгновенно изменяется и принимает значение k. Переходная функция звена (см. рис. а) имеет вид
 .
.
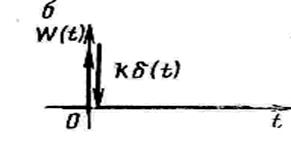
Аналогично, функция веса (рис. б) определяется выражением
 .
.
Сигналы любой частоты (от нуля до бесконечности) проходят через безынерционное звено с одинаковым отношением амплитуд выходной и входной величин, равным k.
Примерами технической реализации звена являются механический редуктор, потенциометрический датчик углового перемещения, тахогенератор, операционный усилитель.
Понятие безынерционного звена является продуктом математической идеализации. На самом деле все реальные конструктивные элементы обладают некоторой инерционностью, так как передача энергии со входа на выход не может осуществляться мгновенно.
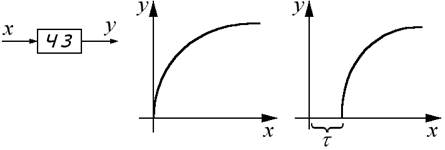
8.2 Апериодическое (инерционное) звено I-го порядка
Дифференциальное уравнение апериодического звена имеет вид
передаточная функция
 ,
,
переходная функция (рис. а)
 ,
,
функция веса (рис. б)
 .
.
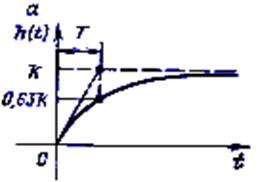
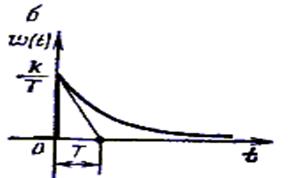
T – постоянная времени – отрезок, отсекаемый на асимптоте касательной, проведенной к кривой в любой точке. Чем больше Т, тем дольше длится переходный процесс. Практически переходный процесс считается законченным ч
| <== предыдущая лекция | | | следующая лекция ==> |
| | | Режимы шпарки птицы |
Дата добавления: 2017-01-16; просмотров: 3513;
Поиск по сайту
Узнать еще
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- CRM - стратегия управления взаимоотношениями с клиентом
- I. КЛАССИФИКАЦИЯ ПО ИСПОЛЬЗОВАНИЮ.
- I. Классификация углеводов.
- I.4. Классификация групп крови
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- III.3. Классификация пород-коллекторов нефти и газа
- IV. Классификация в зависимости от локализации источника кровотечения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
