Деформационные сенсоры
Деформационными будем называть сенсоры, которые преобразуют физические воздействия в деформацию упругих элементов, которая служит мерой этого воздействия (информативного параметра). По конструкции деформационные сенсоры бывают на основе мембраны, на основе сильфона, на основе трубчатой пружины (трубки Бурдона), дилатометрические, биметаллические.
Сенсор на основе мембраны показан на рисунке хх
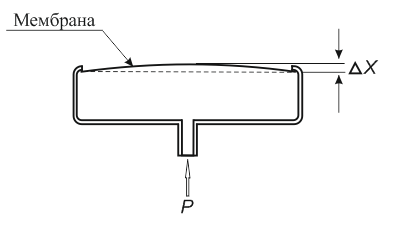
Рис Деформационный сенсор давления на основе мембраны.
Мембрана представляет собой упругую фольгу, изготовленную из нержавеющей стали или из бериллиевой бронзы, которая может многократно прогибаться без остаточных деформаций. При увеличении давления мембрана прогибается и величина прогиба DХ служит мерой давления. В датчиках мембрана обычно сопряжена скаким либо другим сенсором – резистивным, индуктивным, емкостным, который преобразует величину прогиба в электрический сигнал. В датчиках c дискретным выходом (сигнализаторах уровня) мембрана обычно связана посредством рычагов c переключающими контактами.
Мембранные сенсоры применяются в датчиках давления, температуры и уровня. Достоинствами датчиков с мембранными сенсорами является возможность использования как на малых, так и на больших давлениях, простота конструкции и дешевизна. К недостаткам следует отнести не большой динамический диапазон входных давлений (для конкретной конструкции).
На рисунке хх показан сенсор на основе сильфона.
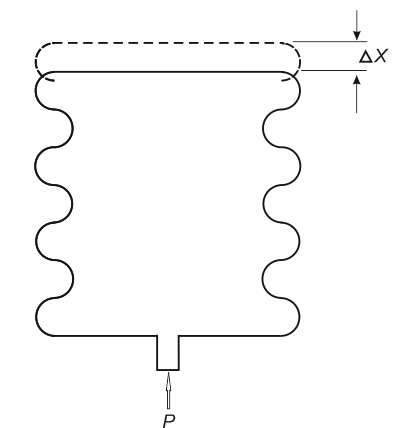
Рис Деформационный сенсор на основе сильфона.
Сильфон представляет собой упругую гофрированную оболочку из нержавеющего металла, которая способна сохранять первоначальную форму при многочисленных циклах растяжения и сжатия под воздействием внешнего или внутреннего давления и температуры. При изменении давления верхняя часть сильфона смещается на расстояние Dх. Как и в случае мембраны это перемещение c помощью других сенсоров преобразуется в электрический сигнал, либо c помощью механических связей при определенной величине перемещения вызывает переключение контактов.
Сильфоны применяют в датчиках давления и температуры. Они обладают большей по сравнению c мембранами чувствительностью, обеспечивают значительное перемещение подвижной части и используются также в реле давления.
Сенсор на основе трубчатой пружины показан на рисунке хх
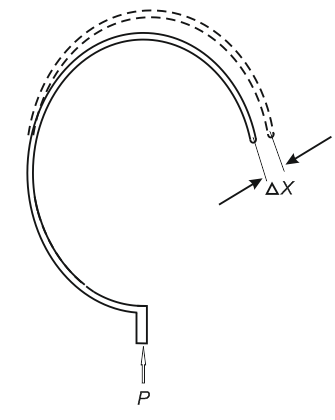
Рис Сенсор на основе трубки Бурдона.
Трубка Бурдона представляет собой тонкую полую трубку эллиптического или овального сечения, изогнутую по окружности и запаянную на одном конце. При изменении давления внутри трубки ее свободный конец смещается на величину Dх. Это перемещение преобразуется в электрический сигнал резистивным, индуктивным или емкостным сенсором.
Сенсор на основе трубчатой пружины широко используется для измерения давления в манометрах и в датчиках давления. Недостатком является малая перегрузочная способность и склонность к вибрациям пружины при пульсациях давления.
Дилатометрические сенсоры.
Дилатометрические (объемные) датчики измерения температуры основаны на явлении расширения (сжатия) твердых тел, жидкостей или газов при уличении (уменьшении) температуры.
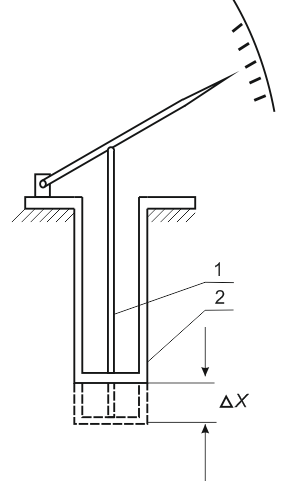
Рис. Дилатометрический сенсор. 1- стержень c малым коэффициентом теплового расширения, 2- корпус c большим коэффициентом теплового расширения.
На рисунке хх показан сенсор, состоящий из стержня c малым коэффициентом теплового расширения (например кварц) и трубчатого корпуса из металла c большим коэффициентом теплового расширения (например латунь). При нагревании такой конструкции корпус удлиняется на величину DХ и через систему рычагов передвигает стрелку либо переключает электрические контакты.
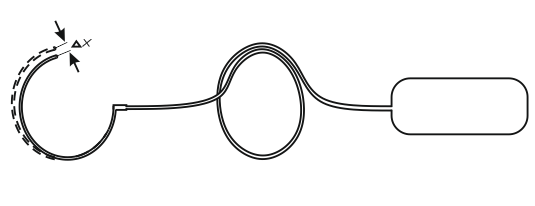
Рис. Дилатометрический сенсор, работающий на газе. 1- болон, наполненный газом, 2- капиллярная трубка, 3 – манометрическая трубка.
На рисунке хх изображен сенсор, в качестве рабочего тела в котором используется газ (например сухой воздух). При изменении температуры баллона давление в нем изменяется и через капиллярную воздействует на манометрическую трубку, которая преобразует давление в перемещение и может передвигать стрелку показывающего прибора, либо переключать электрические контакты. В качестве преобразователя давления в перемещение может быть использован также сильфон или мембрана.
Температурный диапазон работы преобразователей, основанных на расширении твердых тел, определяется стабильностью свойств материалов при изменении температуры. Обычно с помощью таких преобразователей измеряют температуры в диапазоне –60 – 400 0С. Погрешность преобразования составляет 1 – 5 %. Температурный диапазон работы преобразователя с расширяющейся жидкостью зависит от температур замерзания и кипения последней (для ртути --39 – 357 0С, для амилового спирта - -117 – 132 0С, для ацетона - -94 – 570С. Погрешности жидкостных преобразователей составляют 1 – 3 % и в значительной степени зависят от температуры окружающей среды, изменяющей размеры капилляра. Нижний предел измерения преобразователей, использующих в качестве рабочей среды газ, ограничивается температурой сжижения газа ( - 195 0С для азота, - 269 0С для гелия), верхний же – лишь теплостойкостью баллона.
К достоинствами дилатометрических сенсоров можно отнести их простоту и малую стоимость. Недостатком является большая погрешность измерения и не высокая надежность.
Биметаллические сенсоры
Принцип работы биметаллических сенсоров основан на свойствах биметаллической пластинки, состоящей из двух соединенных друг c другом металлов c разными коэффициентами температурного расширения.
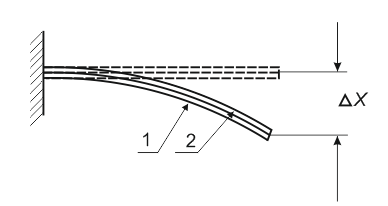
Рис. Биметаллическая пластинка. 1- металл №1 (например медь), металл №2 (например железо).
При нагревании такая пластинка деформируется (изгибается) преобразуя таким образом температуру в перемещение свободного конца. Часто биметаллическую пластинку применяют в виде пружины, спирали или другой конструкции. Биметаллическиесенсоры входят в состав датчиков температуры среды любого вида (жидкой, сыпучей или газообразной) в диапазоне температур от -70°С до +600°С. Достоинства биметаллических сенсоров заключаются в простоте их конструкции и дешевизне. Недостаток – относительно малая надежность и высокая погрешность измерения.
Емкостный сенсор
Рассмотрим простейший конденсатор, изображенный на рисунке х
Рис.
Конденсатор состоит из двух параллельных пластин, расположенных на расстоянии d друг от друга. Между пластинами конденсатора находится материал c диэлектрической проницаемостью e. Его емкость C будет равна:
 ()
()
Здесь e0 – диэлектрическая проницаемость вакуума,
S и d – площадь перекрытия пластин и расстояние между ними соответственно.
Конструктивно емкость реальных датчиков отличается от рассмотренной выше. Для емкости произвольной формы можно записать:
Здесь G – так называемы форм-фактор, величина, зависящая от геометрии конденсатора.
Емкостные сенсоры обладают высокой чувствительность. При изменении площади перекрытия пластин S или диэлектрической проницаемости e чувствительность постоянна и соответственно равна

Однако если в следствии изменения физической величины изменяется расстояние между пластинами d, чувствительность не линейны и является функцией d.
Если изменение любого из параметров конденсатора будет вызвано изменением какой либо физической величины, изменится его емкость, измерив которую можно получить значение этой величины. Следовательно, конденсатор может служить сенсором физических величин, которые могут изменять его емкость. При изменении геометрических размеров это может быть перемещение, давление. При изменении диэлектрической проницаемости можно измерять уровень жидкостей, сыпучих материалов, температуру, влажность.
Для преобразования изменения емкости в напряжение используют схемы включения, показанные на рис хх
Для питания измерительной схемы используют генератор тока, ток которого определяется его большим внутренним сопротивлением и практически не зависит от сопротивления нагрузки. В этом случае выходное напряжение будет зависеть только от емкости датчика.
Бббб
Индуктивные сенсоры.
Рис
Под действием физических параметров в такой конструкции может изменяться магнитное сопротивление воздушного зазора (перемещение якоря в направлениях, указанных стрелками), может изменяться магнитная проницаемость сердечника m (механические усилия). Если катушку питать токами высокой частоты, при изменении воздушного зазора значительно изменяется потери энергии, обусловленные вихревыми токами в подвижной части сердечника, количественной оценкой которых является добротность катушки. Если на сердечник сенсора поместить две катушки, от параметров воздушного зазора будет зависеть эдс, наводимая во вторичной катушке.
В зависимости от того, какой информативный параметр (индуктивность, добротность, коэффициент трансформации) положен в основу принципа работы сенсора, они могут быть индуктивными, индукционными, токовихревыми, трансформаторными.Достоинством всех индуктивных сенсоров является возможность бесконтактных измерений.
Рассмотрим индуктивный сенсор, т.е. такой, у которого информативным параметром является индуктивность. Конструкция индуктивного сенсора показана на рисунке хх
Рис Индуктивный сенсор.
В общем случае индуктивный сенсор состоит из катушки W1, питаемой переменным напряжением Uпит и ферро магнитного сердечника c магнитной проницаемостью m, который в свою очередь состоит из неподвижной и подвижной частей (якоря). Подвижная часть сердечника может перемещаться относительно неподвижной части в направлениях, показанных стрелками.
В цилиндрической катушке, намотанной на ферро магнитный сердечник и питаемой переменным током индуцируется е.д.с. самоиндукции e, пропорциональная скорости изменения тока
Коэффициент пропорциональности L называется индуктивностью. Индуктивность зависит от формы и размеров катушки, а также от свойств среды, в которой расположена катушка - магнитной проницаемости m. Для катушки цилиндрической формы (соленоида) индуктивность можно рассчитать по формуле:
 (х)
(х)
Здесь m0 – магнитная проницаемость вакуума;
m - магнитная проницаемость сердечника;
W– число витков катушки;
l – длина средней линии сердечника;
Zмц – магнитное сопротивление магнитопровода катушки.
Если магнитопровод имеет воздушный зазор х, формулу (х) можно переписать так:
 (х)
(х)
Здесь Zм – магнитное сопротивление магнитопровода;
Rx – магнитное сопротивление воздушного зазора.
При написании формулы (х) принято, что площади воздушного зазора и сердечника равны.
Схема включения индуктивного сенсора показана на рисунке х . Выходной сигнал сенсора снимается c сопротивления нагрузки Rн, включенного последовательно с индуктивностью сенсора. Сопротивление индуктивности на переменном токе XL зависит от частоты питающего напряжения f и индуктивности L
Сопротивление минимально при максимальном зазоре х и максимально при минимальном зазоре. Ток в цепи с индуктивным сопротивлением сенсора можнно записать так:
Индуктивное сопротивление сенсора нелинейно и сложным образом зависит от параметров х и m., следовательно и выходное напряжение, снимаемое с RH нелинейно. Примерная зависимость выходного напряжения индуктивного сенсора показана на рисунке Х
Рис.
Для получения линейной выходной характеристики применяют дифференциальные сенсоры, состоящие из двух простых сенсоров, у которых подвижная часть сердечника является общей. Конструкция дифференциального сенсора показана на рисунке х
Рис.
Питание к обмоткам подводится через трансформатор. Выходное напряжение получается как сумма выходных напряжений простых индуктивных сенсоров, рассмотренных выше. Выходная характеристика в этом случае близка к линейной (см. рисунок х ).
Рис.
Выходная характеристика, показанная на рисунке х, имеет место в случае, когда выходное напряжение снимается с сенсора через фазочувствительный выпрямитель. В этом случае сенсор приобретает свойство реверсивности. Если выходное напряжение измерять простым вольтметром, нижнюю часть характеристики на рисунке х следует отобразить зеркально относительно оси перемещений х.
Простые индуктивные сенсоры применяют для построения индуктивных конечных выключателей. Типовым решением является включение индуктивности сенсора в резонансный контур генератора. При изменении воздушного зазора условия генерации нарушаются и срабатывает выходное пороговое устройство (например, реле). Пример такого включения показан на рисунке х
Рис.
Дифференциальные сенсоры могут применяться в качестве измерительных преобразователей для измерения перемещений порядка нескольких миллиметров.
У индукционных(генераторных) сенсоров информативным параметром является напряжение, которое индуцируется в обмотке датчика при изменении магнитного поля. Магнитное поле может создаваться постоянным магнитом так, как показано на рисунке х
Рис.
Постоянный магнит создает замкнутый магнитный поток, который проходит по магнитопроводу и воздушному зазору. Если в воздушном зазоре появляется ферро магнитное тело, магнитный поток резко возрастает за счет уменьшения магнитного сопротивления зазора. Изменение магнитного потока индуцирует ЭДС в обмотке сенсора. Такие сенсоры применяются в датчиках положении, предназначенных для позиционирования вращающихся деталей относительно какой либо контрольной точки. В частности они могут применяются в автомобилях для управления системой зажигания, в расходомерах для подсчета оборотов рабочих органов в единицу времени.
Токовихревыесенсоры имеют катушку, питаемую переменным напряжением высокой частоты 50кГц…10мГц и сердечник из феррита. Однако если сенсор должен работать при повышенных температурах или в широком температурном диапазоне, он не содержит сердечника. Для улучшения метрологических характеристик в конструкцию могут быть добавлены компенсационные катушки и экраны.
Принцип работы токовихревых сенсоров основан на свойствах катушки, работающей на высоких частотах. Импеданс «идеальной» катушки чисто реактивный на любой частоте и равен
У реальной катушки с повышением частоты импеданс изменяется за счет потерь энергии в окружающей среде. В её импедансе (сопротивлении) появляется активная составляющая Rп, вызванная потерями энергии. В диэлектриках эти потери не велики. При появлении в зоне влияния магнитного поля катушки проводников эти потери резко увеличиваются за счет вихревых токов, наводимых в окружающей среде. Количественной оценкой потерь энергии может служить добротность, которая вводится как отношение индуктивной составляющей импеданса катушки к ее активной составляющей
Конструкция токовихревого датчика показана на рисунке х
Рис Токовихревой сенсор
Измерительная катушка находится в торце диэлектрического стержня. Если в зоне электромагнитного поля, возбуждаемого катушкой, появляется токопроводящий предмет (не обязательно ферромагнитный), ее добротность начинает уменьшаться по мере сокращения расстояния между катушкой и поверхностью тестируемого объекта. Измерительная катушка обычно включается в резонансный контур генератора, амплитуда колебаний которого в данном случае будет определяться расстоянием тестируемого объекта от сенсора.
Токовихревые сенсоры входят в состав датчиков для измерения перемещений токопроводящих объектов в диапазоне 0,5…80мм, для измерения виброперемещений при частотах от 1Гц до 100кГц, для осевых смещений и радиальных биений валов, для измерений диэлектрических пленок на проводящем основании, в качестве дефектоскопов неоднородностей в проводящих материалах, как концевые выключатели.
Трансформаторныесенсоры содержат две и более обмоток. Магнитопровод имеет воздушный зазор х.
Рис
Первичная обмотка W1, питаемая переменным током, создает в сердечнике переменное магнитное поле, которое индуцирует во вторичной обмотке W2 напряжение Uвых. Выходное напряжение пропорционально току в первичной обмотке I1 и коэффициента взаимной индукции М.
В свою очередь взаимная индукция зависит от числа витков первичной и вторичной катушек и сопротивления магнитной цепи
 (с)
(с)
Из выражения C следует, что выходной сигнал сенсора в конечном итоге будет зависеть от параметров воздушного зазора - расстояния х и площади перекрытия S. Как и в случае простого индуктивного сенсора, выходная характеристика трансформаторного сенсора не линейна. Для получения линейной зависимости применяют дифференциально-трансформаторные сенсоры, которые состоят из двух простых, имеющих одну общую вторичную обмотку. Конструкция такого сенсора показана на рисунке ь
Первичная обмотка создает магнитное поле в сердечнике, механически соединенном с тестируемым объектом. Если сердечник расположен симметрично относительно вторичных обмоток  и
и  , ЭДС, наводимые в обеих обмотках равны и противоположно направлены (обмотки включены встречно), результирующее напряжение Uвых равно нулю. При смещении сердечника вниз коэффициент взаимной индукции c обмоткой уменьшается, ЭДС в этой обмотке уменьшается, напряжение Uвых возрастает. При противоположном смещении изменяется фаза выходного напряжения, благодаря этому при использовании фазо чувствительного выпрямителя можно получить реверсивный сенсор.
, ЭДС, наводимые в обеих обмотках равны и противоположно направлены (обмотки включены встречно), результирующее напряжение Uвых равно нулю. При смещении сердечника вниз коэффициент взаимной индукции c обмоткой уменьшается, ЭДС в этой обмотке уменьшается, напряжение Uвых возрастает. При противоположном смещении изменяется фаза выходного напряжения, благодаря этому при использовании фазо чувствительного выпрямителя можно получить реверсивный сенсор.
| а | б |
Рис
Вид выходной характеристики показан на рисунке c, (б) сплошной линией, пунктиром показана выходная характеристика, полученная при помощи обычного вольтметра.
Трансформаторные сенсоры входят в состав датчиков перемещения относительно больших расстояний – до 1500мм и отличаются высокой надежностью и малыми погрешностями, порядка 0.2..0.3%.
Резистивные (омические) сенсоры
Принцип работы резистивных сенсоров основан на изменении их активного (омического) сопротивления под действием каких либо физических параметров.
В зависимости от механизма, который вызывает изменение сопротивления сенсора, они подразделяются на: кондуктометрические, потенциометрические (реостатные), магниторезистивные, тензометрические, терморезисторные и фоторезисторные.
Кондуктометрическиесенсоры состоят из двух электродов, между которыми находится какая либо тестируемая среда. К электродам подводится напряжение. Электрическое сопротивление среды изменяется под действием каких либо физических факторов –влажности, уровня сыпучих материалов и жидкостей. Изменяющееся сопротивление вызывает изменение тока в цепи электродов, который регистрируется и служит мерой физического параметра. Принцип действия кондуктометрических датчиков иллюстрируется рисунком п
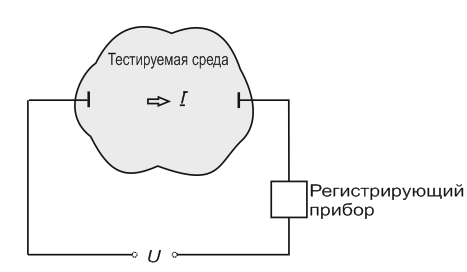
Рис
Кондуктометрические сенсоры входят в состав датчиков влажности древесины, зерна и т.п., уровня воды в различных емкостях.
Потенциометрический сенсор показан на рисунке ч Он представляет собой переменный проволочный резистор, состоящий из диэлектрического каркаса c намотанной на него проволокой. К резистору подводится напряжение питания Uпит. Выходное напряжение Uвых снимается c участка резистора, находящегося между подвижным контактом и общим проводом.
Рис
Если подвижный контакт передвинуть на расстояние Dх, приращение сопротивления составит
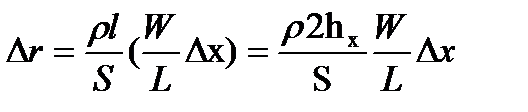
Здесь r - удельное сопротивление проволоки резистора;
S – площадь сечения проволоки;
W – число витков проволоки;
L – длина намотки;
При этом приращение выходного напряжения составит:
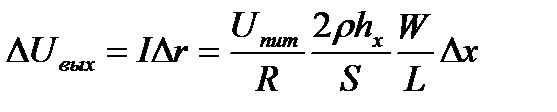
Здесь I – ток через резистор;
R - сопротивление резистора.
Если все конструктивные постоянные параметры обозначить
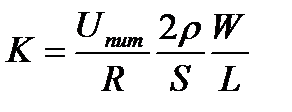
бесконечно малое приращение выходного напряжения можно записать так:
 ь
ь
Т.е. выходное напряжение сенсора зависит от перемещения подвижного контакта и профиля намотки. Если hx постоянна (прямоугольный каркас) после интегрирования Ь получим:
В этом случае получается линейная выходная характеристика. Если принять  , где C – некая постоянная выходное напряжение будет иметь вид:
, где C – некая постоянная выходное напряжение будет иметь вид:
 ()
()
Здесь K2=K1C
Из () видно, что изменяя форму каркаса можно получить желаемую выходную характеристику, т.е. осуществлять функциональные преобразования.
Из приведенных выше рассуждений следует, что потенциометрические сенсоры могут применяться для измерений перемещений и тех физических параметров, которые могут быть преобразованы в перемещение, например, давления, угла поворота, уровня, температуры. Кроме проволочных резистивных сенсоров в настоящее время выпускаются сенсоры на основе токопроводящего пластика.
Рис
Напряжение питания подается на весь элемент через неподвижные выводы. Выходное напряжение, пропорциональное перемещению движка, снимается с подвижного штока относительно общего провода.
Достоинствами потенциометрических сенсоров является способность работать как на постоянном, так и на переменном токе, достаточно мощный выходной сигнал, возможность создания реверсивных датчиков (пример показан на рисунке ю)
Рис Реверсивный потенциометрический сенсор.
Терморезисторные??
Принцип действия терморезистивных сенсоров основан на свойстве металлов и полупроводников изменять свое сопротивление при изменении температуры.
Для изготовления терморезистивных металлических сенсоров применяют металлы, которые сохраняют свои свойства в течении долгого времени при многократных температурных колебаниях, такие как платину, медь, никель, вольфрам и другие. Для большинства химически чистых металлов температурный коэффициент сопротивления (ТКС) находится в диапазоне (0.0035…0.0068)°C-1. ТКС показывает, на сколько увеличивается каждая единица сопротивления проводника при повышении температуры на один градус. Выбор материала сенсора зависит от диапазона измеряемых температур. В таблице Х приведены диапазоны измерения для трех наиболее часто встречающихся металлических терморезисторов, рекомендованные ГОСТ 6651-2009.
Таблица
| Материал сенсора | Диапазон измерения °C |
| Платина Медь Нитель | -200….600°C -50…200°C -60…180°C |
Все металлические терморезисторы обладают линейной характеристикой преобразования, хорошей воспроизводимостью характеристик. Однако при точных измерениях предпочтительнее платиновые терморезисторы, поскольку обладают наилучшей стабильностью характеристик и могут обеспечивать погрешность измерения при индивидуальной градуировке не хуже 0.001°C.
На рисунке хх показаны конструкции металлических терморезисторов.
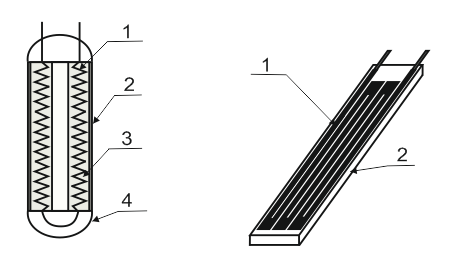
| а) | б) |
Рис. Конструкция металлических термосопротивлений. а) – проволочное термосопротивление, 1- проволочная спираль, 2- стальной корпус, 3- изолирующий порошок c высокой теплопроводностью, 4- заглушка. б) – пленочное термосопротивление, 1 – пленочный терморезистор, 2- диэлектрическая подложка.
ГОСТ 6651-2009 устанавливает НСХ на платиновые, медные и никелевые терморезисторы в виде таблиц, где приведены температуры и соответствующие им сопротивления терморезисторов. В других источниках НСХ приведены в относительных единицах Wt=(Rt)/R0 где Rt – сопротивление при текущей температуре, R0 – сопротивление при 0°С.
Достоинствами металлических терморезисторов является относительно не высокая стоимость, малая погрешность измерения, хорошая воспроизводимость характеристик, что обуславливает их широкое применение.
К недостаткам следует отнести их малое номинальное сопротивление (50Ом,100Ом). Благодаря этому соединительные провода влияют на погрешность измерения увеличивая ее. Для уменьшения влияния сопротивления соединительных проводов необходимо применять 3-х, 4-х проводные линии подключения и мостовые схемы включения этих сенсоров. Пример 3-х проводной схемы подключения показан на рисунке хх
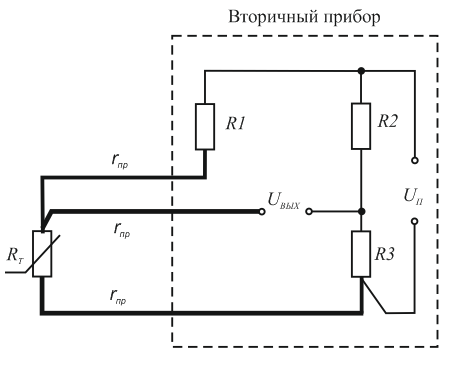
Рис 3х проводная схема подключения терморезистивного сенсора. RT – терморезистор, rпр – сопротивление соединительного провода.
Идея компенсации состоит в том, что подверженные не контролируемому изменению сопротивления соединительных проводов включают в разные плечи моста и изменения их сопротивления в этом случае не приводит к изменению выходного сигнала.
В этом случае условия, когда UВЫХ равно нулю (условия баланса моста) записываются так:

Если температура окружающей среды меняется, сопротивление проводов меняется на одну и ту же величину (поскольку провода равной длины) и будет добавлено в обе части уравнения и не вызовет изменений выходного сигнала.
Полупроводниковые терморезисторы делятся на металлооксидные (NTC) и кремниевые (KTY).Терморезисторы изготавливаются из материалов с высоким температурным коэффициентом сопротивления, который на порядки выше, чем ТКС металлов и металлических сплавов. Для наиболее широко используемых терморезисторов ТКС составляет от −2,4 до −8,4 К-1, номинальное сопротивление от 1 до 106 Ом.
По типу зависимости сопротивления от температуры металлооксидные терморезисторы различают с отрицательным (термисторы) и положительным (позисторы) температурным коэффициентом сопротивления. Термисторы изготавливают на основе оксидов металлов - CuO, MnO (медно-марганцевые, маркируются ММТ), СoO (кобальто-марганцевых КМТ), для позисторов используют титанат бария BaTiO3. У позисторов с ростом температуры растёт их сопротивление; у термисторов увеличение температуры приводит к падению их сопротивления.
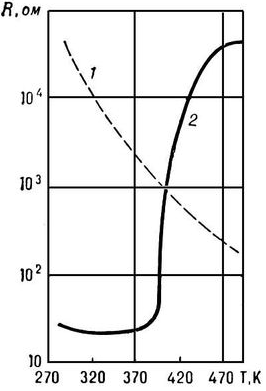
Рис Зависимость сопротивления полупроводниковых терморезисторов от температуры. 1- для термистов, 2- для позисторов.
Условно терморезисторы классифицируют как низкотемпературные (предназначенные для работы при температуpax ниже -100°С), среднетемпературные (от -100°С до 230°С) и высокотемпературные (выше 230…600°С). Существуют терморезисторы, предназначенные для работы при температурах от 600°С до 1000°С.
Отличительной особенностью полупроводниковых терморезисторов является нелинейность их характеристики. Это затрудняет их взаимозаменяемость. По этой причине они, как правило, используются для измерений в узком диапазоне температур, в котором их характеристику можно считать линейной.
Кроме металлооксидных существуют кремниевые терморезисторы (KTY), в основе работы которых лежит зависимость распределения объемного сопротивления полупроводника (кремния) от температуры. Рабочий диапазон таких датчиков –50...150°С, типовое значение сопротивления 1...2 кОм, погрешность 1—3%. Эти сенсоры обладают практически линейной характеристикой и являются альтернативой более дорогим платиновым пленочным сенсорам.
| Металлооксидные NTC термисторы | Полупроводниковые KTY датчики | Термопары | Платиновые терморезисторы на керамической подложке |
| Диапазон температуры измерения -100…300°C, некоторые модели до 500 °C | Диапазон температуры измерения -55…300°C | Диапазон температуры измерения -200…1800°C | Диапазон температуры измерения -196…1000°C |
| Нелинейные выходные характеристики Отсутствие их международных стандартов | Более линейные характеристики, чем у NTC термисторов, погрешность не менее 0.6°C | Наличие международного стандарта типов термопар | Высокая линейность характеристик, установленная стандартом DIN EN 60751 |
| Диапазон измерений зависит от типа термистора, стандартный диапазон 200 К | Диапазон измерений 200 К, стандарт: -55…+150°C | Диапазон измерений -40…1700°C (зависит от типа термопары), требуется компенсация холодного спая | Диапазон измерений стандартный: -70…+500°C, высокий: -40…1000°C |
| Дрейф сопротивления: 0.35% через 100 ч при температуре 150°C | Дрейф сопротивления: 0.45% через 1250 ч при температуре 150°C | Зависит от строения термопары | Дрейф сопротивления:0.04% через 1000 ч при температуре 500°C |
| Точность сопротивления ± 1%, ±0.2°C в узком диапазоне температур | Точность ссч опротивления ± 5%, максимальная точность ±0.5% | Точность соответствует классу 2, зависит от типа термопары | Точность соответствует DIN EN 60751, класс B: ± 0.21% при +100°C± 0.33% при +500 °C |
| Высокая чувствительность для узких температурных диапазонов, значительное изменение сопротивления на градус Кельвина, чем у платиновых и полупроводниковых датчиков | Высокая чувствительность, около 15 ohm/K | Диапазон чувствительности от мкВ/K до мВ/K, зависит от типа термопары | Чувствительность стабильна во всем диапазоне температур, напр., менее 4 Ом/К для датчика 1000 Ом |
| Типы: эпоксидная или стеклянная изоляция; в корпусах DO-35, SMD модели, для автоматической сборки | Типы: стеклянный корпус, SMD и DO-35 корпуса | Типы: Термопары с неогранической изоляцией, голые проводники | Типы: базовые элементы с проводами, SMD, SOT223 и TO92 корпуса |
Магниторезистивный сенсор до5кГц
Магниторезистивные датчики используют магниторезистивный эффект, который проявляется как свойство токонесущих магниточувствительных материалов изменять свое сопротивление под воздействием внешнего магнитного поля. В зависимости от физического и типа материала магниторезистивные датчики различают
Полупроводниковые магниторезисторы (используют эффект Гаусса)
Анизотропные магниторезисторы AMR (на основе пермаллоевой пленки спла железа и никеля)
ГМР магниторезисторы
Рассмотрим свойства магниторезисторов на примере AMR
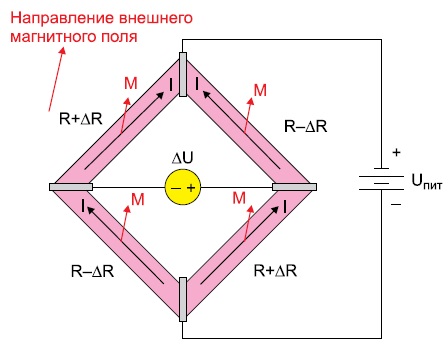
Принцип работы иллюстрируется рисунком ь
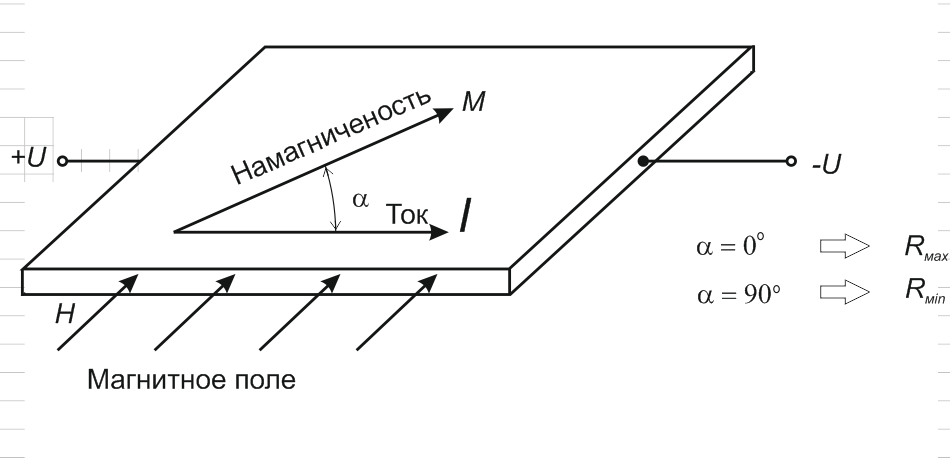
Рис.
Принцип работы магниторезистивных сенсоров основан на так называемом AMR –эффекте, который заключается в том, что при изменении угла между векторами тока и намагниченности изменяется средняя длина пробега свободных электронов, что в конечном итоге влияет на сопротивление.
Этот эффект проявляется в тонких пленках из пермаллоя (NiFe). Если через пленку из такого материала пропустить ток и поместить ее во внешнее магнитное поле, сопротивление пленки будет изменяться в зависимости от угла между направлением тока I и вектором намагниченности М. При совпадении вектора М c направлением тока сопротивление пленки максимально, если угол составляет 90° - оно минимально. Следует отметить, что вектор магнитного поля должен лежать в плоскости пленки. В этом заключается отличие от эффекта Холла, для которого вектор магнитного поля должен быть перпендикулярен плоскости сенсора.
Сопротивление магниторезистора можно рассчитать по формуле:
 ()
()
Здесь DRMAX – максимальное значение отклонения сопротивления, равное 2.5%.
Из выражения () следует, что выходной сигнал сенсора определяется только взаимным положение сенсора и внешнего магнитного поля и не зависит от напряженности, магнитных дрейфов в следствии изменения температуры, старения, механических износов.
Благодаря своей чувствительности к направлению магнитного поля относительно вектора тока магниторезистивные сенсоры позволяют измерять как линейные, так и угловые перемещения, положения объекта относительно магнитного поля земли, детектировать наличие магнитного поля. Они обладают высокой чувствительностью и позволяют измерять самые малые изменения магнитного поля. Для улучшения линейности выходной характеристики изготавливают многослойные магниторезисторы, в которых слои пермаллоя чередуются cо слоями металла. Для преобразования изменяющегося под действием магнитного поля сопротивления в напряжение магниторезисторы соединяют по мостовой схеме.
Магниторезистивные сенсоры входят в сосав датчиков контроля перемещений объектов в робототехнике, измерения слабых магнитных полей (системы навигации), измерения частоты вращения различных агрегатов, измерения угловых координат, построения бесконтактных датчиков тока, концевых выключателей. Достоинством магниторезистивных сенсоров является так же их способность работать на высоких частотах – порядка 5 кГц.
Тензометрическийсенсор. Принцип работы тензометрического сенсора основан на эффекте изменения активного сопротивления некоторых материалов (металлов и полупроводников) при их деформации. На рисунке т принц
Дата добавления: 2016-12-09; просмотров: 3300;
Поиск по сайту
Узнать еще
- Деформационные измерительные преобразователи давления, основанные на методе прямого преобразования
- Деформационные измерительные преобразователи основанные на методе уравновешивающего преобразования
- Деформационные манометры
- Деформационные манометры.
- Деформационные преобразователи
- ДЕФОРМАЦИОННЫЕ ПРОЦЕССЫ В ЗОНЕ РЕЗАНИЯ
- Деформационные швы (температурные, осадочные)

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
