Регулирование частоты и активной мощности в энергосистеме
Основная задача регулирования нагрузки в энергосистеме состоит в том, чтобы приводить выработку электроэнергии в соответствии с непрерывно меняющимся потреблением, обеспечивая при этом минимальные суммарные затраты, связанные с производством электроэнергии. Сложность решения данной задачи состоит в том, что практически невозможно в каждый момент времени определить суммарную мощность, потребляемую всеми потребителями в энергосистеме. По существу единственным источником информации о величине несоответствия выработки электроэнергии ее потреблению является отклонение частоты в энергосистеме от номинального значения. Задачи регулирования мощности и частоты в системе решаются совместно службой диспетчерского управления и системой автоматического регулирования частоты и активной мощности. Эта задача решается в несколько этапов.
На первом этапе, на основании статистических данных по энергосистеме за предыдущие периоды работы, а также на основании заявок и планов работы различных потребителей разрабатываются планируемые графики нагрузки энергосистемы. Эти графики разрабатываются на длительную перспективу с учетом возможных уровней изменения нагрузки потребителей за этот период, а также суточные и недельные.
На втором этапе, на основании анализа состояния энергогенерирующего оборудования, его экономических показателей, а также уровня потребления тепловой нагрузки проводится распределение нагрузки между электростанциями (подробно о методах распределения нагрузки между станциями и агрегатами будет сказано ниже). Далее разрабатываются предварительные плановые графики работы электростанций, которые выдаются последним в виде графиков плановых заданий.
Если бы фактическое потребление энергии соответствовало бы полностью плановому, то выполнение плановых графиков обеспечило бы поддержание заданных параметров (частоты и напряжения) в энергосистеме. В реальных условиях эксплуатации потребление электроэнергии, как правило, отличается от планового, кроме этого в силу объективных причин (например, отказов) генерация мощности может отличаться от плановой. Все эти перечисленные факторы в первую очередь и приводят к отклонению основных параметров (частоты и напряжения) в системе от нормы. Регулирование мощности таким образом состоит в покрытии неплановых отклонений потребляемой мощности, что по существу является третьим этапом регулирования нагрузки.
В реальной жизни в каждый момент времени в энергосистеме происходят постоянные колебания нагрузки, связанные с непрерывным включением и выключением потребителей или генераторов и линий электропередачи. Эти колебания нагрузки приводят к колебаниям частоты в энергосистеме, которые имеют разную амплитуду и период колебания. Среди них можно выделить низкочастотные колебания большой амплитуды, период которых измеряется минутами, и наложенные на них высокочастотные колебания малой амплитуды с периодом в несколько десятых секунды или секунд. Эти отклонения частоты фактически являются свидетельством нарушения баланса мощностей в системе. Таким образом, регулирование частоты состоит по существу в покрытии неплановых отклонений потребляемой мощности.
В целом регулирование осуществляется путем изменения мощности энергоблоков в зависимости от отклонения частоты по статической характеристике. На этом этапе участвуют все энергоблоки. Участие в первичном регулировании определяется статической характеристикой регулирования скорости энергоблоков, представляющей собой график зависимости равновесных значений частоты вращения ротора турбины n или соответствующей ей частоты в энергосистеме f от мощности турбины N (рис. 2.1).
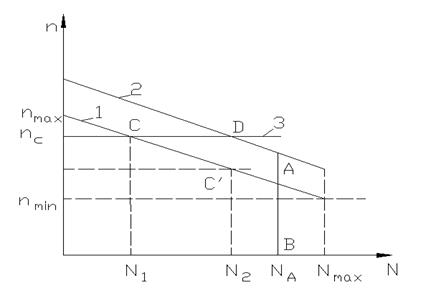
Рис. 2.1. Статистические характеристики регулирования блока.
Наклон этой характеристики определяется коэффициентом неравномерности
d= (nmax – nmin) / no,
где nmax и nmin –максимальное и минимальное значение частоты вращения, соответствующие холостому ходу и полной нагрузке; n0 - номинальная частота вращения.
Пересечение статической характеристики блока 1 с характеристикой сети 3 (линией постоянной частоты fс(nc) в сети определяет рабочую точку блока С, которой соответствует мощность блока N1. При отклонении частоты в энергосистеме до f¢с(n¢c) изменяется положение рабочей точки на характеристике 1. Она смещается в точку С` и, соответственно, меняется мощность блока, направленная таким образом, чтобы замедлить изменение частоты и тем самым определить новое устойчивое состояние системы.
В энергосистеме параллельно работают Z энергетических агрегатов 1,2 – Z со статическими характеристиками регулирования a1b1, a2b2, azbz (рис. 2.2).
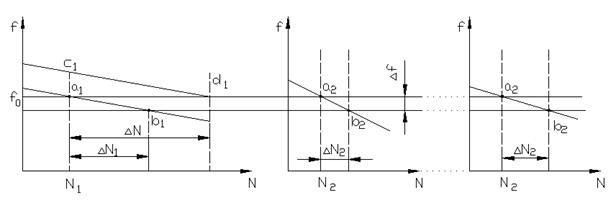 Рис. 2.2 Статистические характеристики агрегатов при регулировании частоты в энергосистеме.
Рис. 2.2 Статистические характеристики агрегатов при регулировании частоты в энергосистеме.
В исходном установившемся режиме с частотой fo пересечением статических характеристик агрегатов с характеристикой сети fo = idem определяются рабочие точки агрегатов a1, a2, …, az , которым соответствуют значения мощностей N1, N2, …,Nz. Пусть в некоторый момент времени к энергосистеме подключился новый потребитель. Его подключение, изменив структуру энергосистемы, уменьшило общее сопротивление электрической сети. Поскольку мощность, отдаваемая генераторами, в этот момент времени еще равна исходной, подключение дополнительного потребителя понижает напряжение электрического тока и вследствие этого уменьшает мощность, получаемую от сети ранее включенными потребителями. Вступающие при этом в работу системы АРВ генераторов, изменяя токи возбуждения, восстанавливают исходное значение напряжения, что сопровождается увеличением токов в сети и возвращением мощностей, получаемых ранее включенными потребителями, к исходным значениям. Дополнительно включенный потребитель забирает из сети мощность, которая распределяется между генераторами обратно пропорционально сопротивлениям электрических цепей, связывающих их с этим потребителем. Так как турбоагрегаты вырабатывают еще исходные значения мощностей, роторы турбоагрегатов замедляют свое вращение и частота в энергосистеме снижается.
Регуляторы скорости паровых, газовых и гидравлических турбин распределяют дефицит мощности между агрегатами приемной системы обратно пропорционально их коэффициентам неравномерности, переводя эти агрегаты к новым режимам, определяемым рабочими точками b1, b2, …, bz (рис. 2.2.). При этом отклонение частоты Δf ограничивается некоторым довольно узким интервалом, определяемым статическими характеристиками регулирования агрегатов. таким путем отдельные агрегаты осуществляют первичное регулирование частоты в энергосистеме.
Первичное регулирование частоты, обладающее определенным статизмом (неравномерностью энергосистемы), принципиально не может обеспечить восстановление нормативного постоянного значения частоты при отклонениях нагрузки.
Вторичное регулирование частоты обеспечивает восстановление заданного ее значения. С этой целью в системе выделяются специальные энергоблоки предназначенные для вторичного регулирования. Сетевой регулятор частоты, выполняемый, как правило, пропорционально-интегральным, воздействуя на АСР (автоматическая система регулирования) агрегатов специально выделенных регулирующих электростанций смещает их характеристики (рис.2. 2) a1b1 в положение c1d1 таким образом, чтобы вернуть номинальную частоту в системе. По мере восстановления частоты агрегаты станций, не привлекаемых ко вторичному регулированию, но участвовавших в первичном регулировании (агрегаты II-z ), возвращаются к исходному (до возмущения) режиму, определяемому рабочими точками a2, …, az. Обычно, Энергоблоки регулирующих станций стремятся держать загруженными так, чтобы они имели достаточный регулировочный диапазон в сторону как возможного разгружения, так и нагружения.
При завершении вторичного этапа регулировании частоты, регулировочный диапазон энергоблоков в одну из этих сторон уменьшается. Поэтому в дальнейшем служба оперативного диспетчерского управления (ОДУ) перераспределяет нагрузки между станциями не участвующими во вторичном регулировании таким образом, чтобы восстановить регулировочный диапазон энергоблоков, участвующих во вторичном регулировании. Этот процесс перераспределения нагрузки называемого третичным регулированием. На данном этапе стремятся добиться оптимального распределения нагрузок между агрегатами энергосистемы, обеспечивающими максимальную эффективность.
С увеличением или уменьшением частоты вращения генераторов той энергосистемы, где произошло возмущение, изменяется взаимный фазовый угол φ между эквивалентными роторами связанных между собой энергосистем. При этом изменяется мощность, передаваемая по межсистемным связям к возмущенной энергосистеме или от нее. Изменение перетока мощности по межсистемным связям обеспечивает помощь соседних систем возмущенной в регулировании частоты, благодаря чему объединение энергосистем облегчает решение задачи регулирования частоты. Вместе с тем небольшие колебания частоты в отдельных частях энергообъединения могут вызвать большие отклонения перетоков мощности, соизмеримые с пропускной способностью межсистемных связей, что выдвигает проблему сохранения устойчивости параллельной работы связанных энергосистем.
Дата добавления: 2019-09-30; просмотров: 1458;
Поиск по сайту
Узнать еще
- V.VII. Зависимость ширины и формы выхода слоя на поверхности от его истинной мощности, угла падения и формы рельефа
- Автоматическая подстройка частоты
- Автоматическое ограничение повышения частоты
- Автоматическое ограничение снижения частоты
- АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
- Автоматическое регулирование
- Автоматическое регулирование числа оборотов двигателя
- Административно-правовое регулирование в агропромышленном комплексе

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
