Конструирование захватного устройства
Конструирование предполагает разработку узлов и деталей, которая ведется путем выбора конструктивных (технических) решений из конечного числа альтернатив.
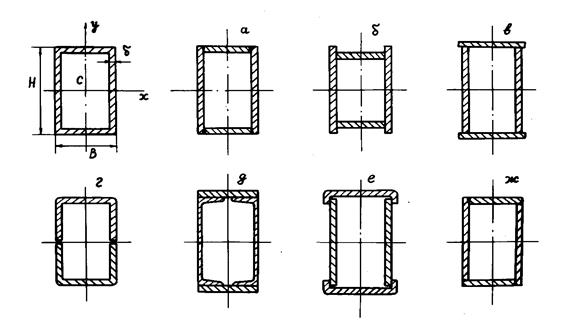
Для уяснения сути конструирования рассмотрим задачу выбора формы сечения рычага. На рис. 2.3представлено пять конкурирующих сечений. Реализация сечения "а"связана с необходимостью снятия фасок для лучшей прочности швов. Дополнительная механическая обработка сверяемых элементов конструкции нежелательна. Высокая прочность шва может быть получена в схеме "б" за счет смещения стенок без механической обработки (снятия фасок). Но недостаток этой схемы состоит в том, что при этом уменьшается момент инерции. От высоты полок момент инерции сечения зависит в квадрате.
|
| Рис. 2.3. Конкурирующие формы сечения рычага захватного устройства |
Указанного недостатка можно избежать, если реализовать схему б, когда сварка ведется по наружным углам. Момент инерции при этом возрастает, но больше получается имасса. Сечения а, б, в имеют тот недостаток, что сварные швы наложены в области максимально напряженных волокон. Этого недостатка можно избежать, если сечения компоновать из двух штампованных половин (рис. 2.3, г). В этом случае шов прокладывается по линии нейтральных волокон, и сечение практически не ослабляется сваркой. Это будет самое "легкое" сечение. Но облегчение конструкции здесь сопряжено с усложнением технологии – необходимо штамповать половинки рычага из достаточно толстой листовой стали толщиной 5…8 мм. Относительно легкая конструкция получается при реализации сечения "д". В этом случае боковины штампуются из тонкого стального листа, а полки привариваются сверху и снизу.
Разумеется, что можно продолжить сравнение и других форм сечений. Но всегда будем иметь конечное число сравниваемых вариантов, среди которых надо отыскать наилучший в определенном смысле (по условиям прочности, по металлоемкости, по технологичности и т.п.).
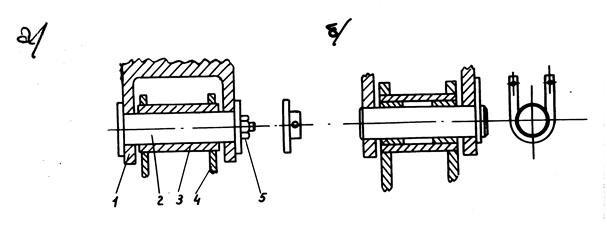
Разработка основного шарнира подвеса рычага к корпусу заключается в обосновании сочленения втулка-палец. Конструктивно такое сочленение может быть выполнено различным образом. Предположим, что проушины на корпусе литые и толщина проушин такова, что давление пальца на проушину в норме. Тогда может быть реализована либо схема (рис. 2.4, а), либо схема (рис. 2.4, б). Схема (рис. 2.4, а) имеет два существенных недостатка: втулка не подлежит ремонту (вварена в конструкцию); палец имеет "шляпку" для фиксации, которую надо формировать либо ковкой, либо на токарном станке (потеря металла в стружку). Кроме того, нельзя признать удачным фиксацию пальца с помощью резьбового соединения. От последнего недостатка легко избавиться, заменив резьбовые соединения шплинтом. От первых двух недостатков свободно сочленение, показанное на рис. 2.4, б. У этой схемы втулка сопряжения рычага с пальцем запрессовывается и подлежит ремонту. Палец не имеет буртика (шляпки). Шайба с прорезью надежно фиксирует палец в проушине. Некоторым недостатком является наличие болтов крепления шайбы.
|
| Рис. 2.4. Возможные варианты шарнира подвески рычага |
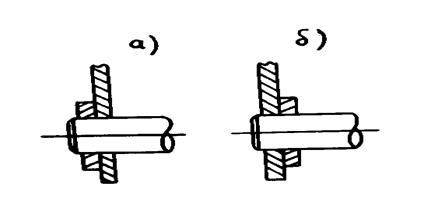
Если проушина крепления рычага к корпусу сварная, то в этом случае необходимо усилить место у отверстий. Это усиление может быть выполнено приварной шайбой либо снаружи (рис. 2.5, а), либо изнутри (рис. 2.5, б).
|
| Рис. 2.5. Возможные варианты крепления проушины рычага к корпусу |
Приварная шайба снаружи увеличивает плечо сил реакции, что при данном поперечном моменте ведет к уменьшению нагрузки на проушину. Вместо шайбы может быть запрессована втулка. Такую конструкцию целесообразно применять в схеме (рис. 2.4, б), когда при ремонте заменяются втулки.
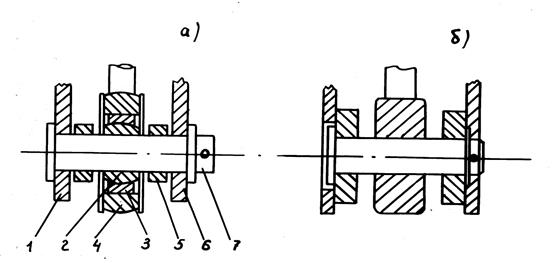
Шарнир сопряжения рычага со штоком гидроцилиндра имеет иное конструктивное оформление. Это обусловлено тем, что ушко гидроцилиндра стандартное и под него необходимо сконструировать пару ушко-палец-проушина рычага. Стандартное ушко имеет сферическую втулку, которая с помощью специальной втулки монтируется в проушине. Положение последней фиксируется либо боковыми шайбами, либо иным способом.
Для того чтобы усилие от штока гидроцилиндра передавалось по центру втулки, приходится устанавливать распорные втулки.
Иногда требуется сочленить палец c проушиной заподлицо. Это можно сделать так, как это показано на рис. 2.6, б. Две шайбы привариваются к проушине рычага изнутри, а сами стенки рычага имеют несколько большее отверстие. Схема (рис. 2.6, б) хорошо работает на прочность – уменьшается изгибающий момент, действующий от усилия на штоке.
|
| Рис. 2.6. Возможные варианты сочленения пальца c проушиной |
2.3. Оптимальная компоновка гидропривода стрелы манипулятора
Компоновка гидропривода стрелы манипулятора предполагает определение положения точек сочленения гидроцилиндра с колонной и со стрелой. Обозначим оси шарниров этих точек соответственно О1 и О2 (см. рис. 2.7).
Положение шарниров исчерпывающим образом определяется заданием четырех величин: a, b, c, d. Эти величины должны быть выбраны исходя из требований (условий) компоновки. Примем в качестве условия оптимальности максимальное использование рабочего хода штока гидроцилиндра при перемещении стрелы из одного крайнего положения в другое. Такая задача проста с точки зрения ееформализации и в то же время не лишена здравого смысла, так как всегда следует стремиться максимально использовать потенциальные возможности. При этом условие оптимальности записывается в виде логического равенства
 (2.17)
(2.17)
где  – максимальная длина гидроцилиндра со штоком;
– максимальная длина гидроцилиндра со штоком;
 – минимальная длина гидроцилиндра;
– минимальная длина гидроцилиндра;
 – рабочий ход штока, реализуемый в данной кинематической схеме.
– рабочий ход штока, реализуемый в данной кинематической схеме.
Условие (2.17) означает, что ход штока реализуется полностью, т.е. разность  между возможным итребуемым ходом равна нулю.
между возможным итребуемым ходом равна нулю.
Функциональное равенство (2.17) можно записать в виде следующих равенств:
 (2.18)
(2.18)
Для того чтобы практически воспользоваться условиями оптимальности (2.18), необходимо записать эти условия в виде функции выбираемых параметров a, b, c, d.
Как получить явную зависимость между параметрами цилиндра , и параметрами подвески a, b, c, d?
Ответ на этот вопрос сводится к способу определения длины отрезка между двумя точками эвклидова пространства.
Определим координаты шарниров О1 и О2 в двух крайних положениях стрелы в системе координат O1X1Z1 (рис. 2.7):
 (2.19)
(2.19)
Для длины отрезков О1О2 в двух крайних положениях определяются в принятой системе координат следующим образом:
 (2.20)
(2.20)
Возвращаясь к условиям (2), получаем следующие функциональные зависимости:
 (2.21)
(2.21)
Два уравнения (2.21) содержат четыре неизвестные величины, подлежащие определению (a, b, c, d).
Для устранения неопределенности необходимо присоединить к уравнениям (2.21) какие-нибудь две связи, налагаемые на неизвестные.
Наиболее естественно задаться величинами a, d , определяющими положение шарниров относительно осей манипулятора и колонны. Желательно, чтобы оси шарниров располагались по возможности ближе к этим осям. Это следует из того обстоятельства, что шарниры должны размещаться вне контуров стрелы и колонны, причем чемближе будет шарнир к соответствующим поверхностям, тем меньше будет металлоемкость проушин и меньше скачки изгибающих моментов в сечениях стрелы и колонны.
Напомним, что скачок изгибающего момента равен произведению составляющей усилие на штоке гидроцилиндра вдоль продольной оси на расстояние точки шарнира от этой оси.
Задавшись  (2.22)
(2.22)
и присоединив равенства (2.22) к уравнениям (2.21), получаем замкнутую систему уравнений.
При этом возникает следующая проблема вычислительного характера. Если возвести левые и правые части уравнений (2.21) в квадрат, то получим систему двух квадратных уравнений, которые должны решаться совместно.
Покажем, как можно построить более оригинальную вычислительную процедуру. Зададимся величиной "с" и решим квадратное уравнение относительно "а"
 (2.23)
(2.23)
Подставим найденные значения во второе уравнение (2.21) и получим невязку
 (2.24)
(2.24)
При этом поиск решения сводится к вычислению функций  (с) и минимизации невязки на нуль
(с) и минимизации невязки на нуль
 (2.25)
(2.25)
Искомое решение можно получить играфически. Для этого зададимся рядом значений "с"(три-четыре точки) и для каждого из них сначала находим из квадратного уравнения величину "  ", а затем значение невязки
", а затем значение невязки  . Построив графики (рис. 2.8), при = 0 найдем "сопт.", а по "сопт." найдем "аопт.".
. Построив графики (рис. 2.8), при = 0 найдем "сопт.", а по "сопт." найдем "аопт.".
Подчеркнем еще раз, что найденное решение получено из условия максимального использования хода штока (при фиксированных шарнирах решение дает самый короткий гидроцилиндр).
Рассмотрим теперь более сложную задачу. Полагаем, что величины b и d могут выбираться в некоторых ограниченных областях их определения В и Д, а величины а и с по-прежнему неограниченны и определяются в соответствии с уравнениями (2.21).
Наличие принципиальной возможности выбора величин b и d необходимо подкрепить соответствующей математической зависимостью. Для этого выберем в качестве критерия оптимальности усилие на штоке гидроцилиндра, представляющего собой функцию
 (2.26)
(2.26)
При некотором угле  усилие на штоке гидроцилиндра достигает наибольшего значения. Искомые параметры подвески гидроцилиндра а, b, c, d должны быть выбраны так, чтобы максимальное значение требуемого усилия было бы минимальным, что может быть записано в виде следующей логической схемы:
усилие на штоке гидроцилиндра достигает наибольшего значения. Искомые параметры подвески гидроцилиндра а, b, c, d должны быть выбраны так, чтобы максимальное значение требуемого усилия было бы минимальным, что может быть записано в виде следующей логической схемы:



 (2.27)
(2.27)
Построим в соответствии с логической схемой (2.27) алгоритм поиска оптимального решения.
Для данного класса манипулятора известен расчетный момент (грузовой момент) на максимальном вылете, зная который, легко найти момент, передаваемый через усилие на штоке гидроцилиндра:
 (2.28)
(2.28)
Но момент для каждого угла есть величина переменная. При изменении изменяется и плечо  . Поэтому в общем случае имеем зависимость
. Поэтому в общем случае имеем зависимость
 (2.29)
(2.29)
Пересчет внешнего момента в зависимости от угла затруднений не вызывает.
Остановимся на определении плеча  в функции угла
в функции угла  .
.
Для определения плеча обратимся к треугольнику ОО1О2, стороны ОО1 и ОО2 которого суть векторные величины  .
.
Удвоенная площадь этого одной стороны равна  , а с другой – модулю векторного произведения
, а с другой – модулю векторного произведения  . В свою очередь модуль векторного произведения равен определителю:
. В свою очередь модуль векторного произведения равен определителю:
 (2.30)
(2.30)
а расстояние О1О2 с координатами шарниров связано зависимостью
О1О2  (2.31)
(2.31)
Тогда из условия
получаем искомую функцию координат
 (2.32)
(2.32)
Подставляя вместо координат x2, z2 их выражения
 , (2.33)
, (2.33)
получим явную функцию плеча  от угла .
от угла .
В итоге приходим к логической схеме
 (2.34)
(2.34)
Процедура, соответствующая логической схеме (2.34), может быть представлена в следующем виде. Задаемся b и d в своих областях их определения ирешаем ранее изложенную задачу (отыскиваем а и с). Для этого варианта подвески вычисляем отношение  и находим его максимум.
и находим его максимум.
Затем задаемся другой парой чисел b и d, вычисляем a, с и для нее находим свой максимум .
И так поступаем до тех пор, пока параметры b и d не примут граничных значений. Остается из всех вариантов отобрать тот, для которого максимум  имеет наименьшее значение. Это и будет оптимальным решением, а параметры a, b, c, d – оптимальными параметрами.
имеет наименьшее значение. Это и будет оптимальным решением, а параметры a, b, c, d – оптимальными параметрами.
Естественно, что указанная вычислительная процедура может быть реализована на ЭВМ (велик объем вычислений). Решение задачи можно упростить, если предполагать как гипотезу, что максимальное усилие наштоке гидроцилиндра имеет место на максимальном вылете манипулятора. В этом случае отпадает надобность в построении функции  , а достаточно максимизировать плечо на максимальном вылете манипулятора.
, а достаточно максимизировать плечо на максимальном вылете манипулятора.
Логическая схема вычислений принимает следующий простой вид:
 (2.35)
(2.35)
где  ;
;
В данном случае реализуется алгоритм, изложенный при решении первой задачи. Отличие состоит лишь в том, что сравниваются между собой несколько вариантов, отличающихся значениями b и d в их областях определения.
Дата добавления: 2016-11-26; просмотров: 847;
Поиск по сайту
Узнать еще
- II. Особенности политического устройства Ирана
- Table 1. Функции ГИС для лесного хозяйства и лесоустройства
- VI. КОМБИНАЦИОННЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- VI. ПОСЛЕДОВАТЕЛЬНОСТНЫЕ ЦИФРОВЫЕ УСТРОЙСТВА
- XLII. ПОДВЕСНЫЕ И ПРИЦЕПНЫЕ УСТРОЙСТВА
- А. Электронные устройства на ОУ
- Автоматические контрольные устройства
- Активный контроль заготовок до обработки. Блокирующие устройства

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
