Принципы устройства
В последние годы в новых моделях промышленных роботов роль приводов исполнительной системы все чаще отводится электрическим сервосистемам. Это объясняется тем, что электрические сервосистемы, уступая гидравлическим в мощности выходного воздействия, обладают такими важными преимуществами, как сравнительно низкая стоимость, простота конструкции, отсутствие загрязнения рабочих помещений, низкий уровень шума, а также высокая надежность. Исполнительными элементами электрических сервосистем, как правило, служат электродвигатели постоянного тока, так как именно эти двигатели обладают хорошей управляемостью и позволяют сравнительно легко добиться высокой точности работы сервосистемы. С недавних пор большое внимание стали уделять применению бесколлекторных сервомоторов. Причина популярности этих моторов - малое потребление энергии и простота в обслуживании.
На рис. 3.7 показана структурная схема аналоговой сервосистемы управления приводом манипулятора. Основными элементами системы являются усилитель постоянного тока, сервомотор постоянного тока, а также потенциометр, который используется для формирования сигнала обратной связи. Как следует из рисунка, величина угла θ1, заданная на входе в качестве целевого угла поворота манипулятора, преобразуется в соответствующий по величине сигнал υ1. Из величины υ1 вычитается υ2 - сигнал обратной связи, сформированный потенциалом и по величине соответствующий реальному значению угла поворота манипулятора. Разность напряжений е = υ1 - υ2 передается на вход сервоусилителя постоянного тока, а оттуда в усиленном виде поступает в обмотку сервомотора постоянного тока, заставляя его вращаться. Вращение сервомотора вызывает соответствующее вращение манипулятора, причем скорость движения манипулятора уменьшается за счет установки понижающей шестерни между сервомотором и поворотным механизмом манипулятора. Текущее значение угла поворота манипулятора преобразуется потенциометром в соответствующее напряжение υ1, которое в качестве сигнала обратной связи вычитается из входного напряжения υ1, а разность напряжений вновь поступает на вход сервоусилителя. Таким образом, текущее значение угла поворота манипулятора θ2 постепенно становится практически равным заданному на входе целевому значению θ1.
Рис. 3.7. Управление движением манипулятора с помощью электрической сервосистемы. 1 - входное задающее значение угла θ1; 2 - потенциометр для измерения входного задающего значения угла θ1; 3 - усилитель постоянного тока; 4 - входное напряжение ν1, 5 - э. д. с. е = υ1- υ2; 6 - напряжение обратной связи ν2; 7 - сервомотор постоянного тока; 8 - выходное значение угла θ2≈ θ1; 9 - редуктор скорости вращения; 10 - потенциометр для измерения величины выходного угла
♦♦♦ Заметим, что в процессе управления происходит усиление вращательного момента, приложенного к поворотному механизму манипулятора. Так же как и в рассмотренной ранее системе управления, исходный сигнал υ1 поступает от компьютера или какого-либо другого управляющего устройства, вынесенного непосредственно из контура управления приводов. Такой подход оказывается весьма распространенным в практике построения сервосистем.
Электрический сервомотор постоянного тока, по существу, ничем не отличается от любого другого электродвигателя, предназначенного для преобразования электрической энергии в механическую. Приставка "серво" используется лишь для того, чтобы подчеркнуть, что при проектировании и изготовлении двигателей данного типа особое внимание уделялось обеспечению таких свойств, как, хорошая управляемость входного электрического сигнала выходными механическими параметрами - углом поворота и скоростью вращения - и очень малое время срабатывания. Большинство двигателей постоянного тока обладает превосходной управляемостью по скорости вращения, а вот для уменьшения времени срабатывания приходится прибегать к различным конструктивным хитростям. В частности, удлинение якоря приводит к уменьшению момента инерции, и в результате сокращается время реакции двигателя на внешний сигнал. Среди методов управления скоростью вращения сервомотора постоянного тока наибольшее практическое применение находят якорное управление, а также управление с последовательной или параллельной обмоткой возбуждения.
Применяемые в системах управления приводами потенциометры по своему устройству очень похожи на потенциометры, используемые для регулировки громкости в радиоприемниках и телевизорах, только при их проектировании и изготовлении повышенное внимание уделяется обеспечению точности показаний и линейности характеристик. Чтобы увеличить срок службы сервосистем, в робототехнике применяют потенциометры бесконтактного типа. В самых последних моделях промышленных роботов начинают применяться цифровые потенциометры - поворотные кодирующие средства. Сервосистемы с цифровыми элементами относятся к типу цифровых сервосистем. По мере увеличения выпуска высококлассных моделей промышленных роботов с управлением от цифровых вычислительных машин будут шире использоваться цифровые сервосистемы.
Структурная блок-схема цифровой системы управления показана на рис. 3.8. Тахогенератор, применяемый здесь для преобразования скорости вращения в электрический сигнал, относится к одному из видов электрических генераторов, которые используются в обычных аналоговых сервосистемах. Назначение этого тахогенератора состоит в том, чтобы помимо обратной связи по позиции (углу вращения) обеспечить в системе управления обратную связь по скорости движения. Системы управления с такой двойной обратной связью по сравнению с обычными системами с одним контуром позиционной обратной связи позволяют добиться более плавного приближения манипулятора к заданной позиции, Отмеченная особенность иллюстрируется на рис. 3.9; здесь система управления с одной только позиционной обратной связью названа жестким управлением, а система управления с двойной обратной связью - мягким управлением или плавным управлением.
Рис. 3.8. Структурная блок-схема цифровой системы управления
Рис. 3.9. Сервосистемы с плавным и жестким управлением. 1 - жесткое управление: 2 - плавное управление
Сервоусилители
Внешний задающий контур сервомотора постоянного тока обычно называют сервоусилителем. Применение сервоусилителей в системах управления скоростью вращения вала электромотора обусловлено двумя факторами. Во-первых, способность транзисторов пропорционально усиливать величину аналогового сигнала дает возможность с помощью слабых входных сигналов управлять работой достаточно мощных моторов; во-вторых, переключательные свойства транзисторов и тиристоров позволяют регулировать поступающее в обмотку мотора напряжение путем преобразования аналогового сигнала в импульсы соответствующей величины. Второй из перечисленных факторов, а именно использование транзисторных переключателей в системах управления скоростью, обеспечивает уменьшение потерь энергии при торможении или разгоне вала электромотора. Поэтому такие переключатели являются незаменимыми элементами систем управления автономными роботами, для которых особое значение приобретает увеличение времени работы без подзарядки бортовых источников питания. В дальнейшем ограничимся изложением лишь основных принципов использования транзисторов в качестве усилителей.
На рис. 3.10 приводятся два основных варианта электрических схем задающего контура электродвигателей постоянного тока. В левой схеме (рис. 3.10, а) использован способ управления по напряжению, а в правой (рис. 3.10, б) - по току. Для той и другой схемы входным управляющим сигналом является напряжение Vi.
Рис. 3.10. Принципиальная схема задающего контура электромотора постоянного тока. а - контур, управляемый напряжением; б - контур, управляемый током
Схема на рис. 3.10, а соответствует случаю, когда усилитель подключается с заземленным (общим) коллектором, а электромотор является нагрузкой для эмиттера. При таком подключении, поскольку падение напряжения VBE на участке между базой и эмиттером транзистора приблизительно равно нулю, практически все входное напряжение оказывается приложенным к полюсам электродвигателя, т. е. V0 = Vi.
Таким образом, управляя величиной входного напряжения Vi, можно управлять напряжением V0 на клеммах двигателя и тем самым добиться необходимых изменений скорости вращения вала.
При подключении усилителя по схеме, показанной на рис. 3.10, б, электромотор выступает в качестве нагрузки уже для коллектора. В этом случае сила тока iE, проходящего через эмиттер, определяется выражением
Так как падение напряжения на эмиттере VBE по-прежнему остается близким к нулю, величина iE оказывается приблизительно равной i0, т. е.
или

Следовательно, в данной схеме с помощью входного напряжения можно непосредственно управлять силой тока i0, протекающего через обмотку электромотора.
На практике величина коэффициента усиления, достижимая при любой из двух вышеописанных схем, часто оказывается недостаточной. Для большего усиления входного сигнала в одном задающем контуре применяют еще один или два дополнительных усилителя. Пример схемы подключения дополнительных усилителей приводится на рис. 3.11. Показанную на этом рисунке группу транзисторов можно рассматривать как один составной транзистор, при этом вся схема превращается в обычный задающий контур, управляемый током.
Рис. 3.11. Задающий контур с высоким коэффициентом усиления
♦♦♦ Заметим, что ни одна из приведенных схем не может быть использована для вращения двигателя в другую сторону.
Основные принципы работы задающих контуров для двухсторонних реверсивных систем управления скоростью вращения вала иллюстрируются на рис. 3.12. Благодаря специфике свойств транзисторов данная схема включения имеет следующую особенность. Поскольку, как и в предыдущих случаях, падение напряжения на участке база-эмиттер практически равно нулю, а ток через коллектор не проходит, эта схема хотя и является реверсивной, но имеет зону нечувствительности для некоторой окрестности нулевого значения управляющего напряжения Vi. Характеристика работы двухстороннего задающего контура с зоной нечувствительности показана на рис 3.12, б. Чтобы уменьшить ширину зоны нечувствительности и, таким образом, обеспечить линейность рабочей характеристики, оказывается эффективным добавить цепи смещения, состоящие из одного диода и одного сопротивления (рис. 3.13). Следует иметь в виду,, что чрезвычайно трудно подобрать диоды, имеющие вольт-амперную характеристику, которая абсолютно совпадает с характеристикой база- эмиттер транзистора. Кроме того, всегда существует опасность, что из-за ненулевой обратной проводимости реального транзистора не весь ток будет проходить через цепь смещения. Именно поэтому для настройки задающего контура на работу с линейной двухсторонней характеристикой приходится помимо диода включать в схему со стороны эмиттера небольшое по величине сопротивление (рис. 3.13).
Рис. 3.12. Принципиальная схема и рабочая характеристика реверсивного сервоусилителя. а - принципиальная схема реверсивного сервоусилителя; б - рабочая характеристика
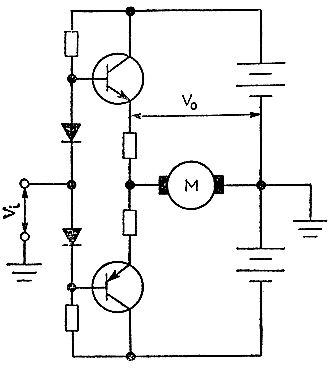
Рис. 3.13. Схема компенсации зоны нечувствительности, возникающей из-за разброса параметров диодов и тока смещения
Рассмотренный в качестве иллюстрации основных принципов работы двухсторонний задающий контур на практике не обеспечивает нужного усиления, поэтому в реальных сервомоторах используются различные составные схемы задающего контура. Схема одного из распространенных способов построения составного контура приводится на рис. 3.14.
Рис. 3.14. Задающий контур, построенный на основе схем Дарлингтона
Дата добавления: 2021-02-19; просмотров: 208;
Поиск по сайту
Узнать еще
- II. ПЕРЕФЕРИЙНЫЕ УСТРОЙСТВА
- III. Части речи и принципы их классификации
- IV УСТРОЙСТВА ФИЛЬТРАЦИИ СИГНАЛОВ
- IV. Критерии и принципы обеспечения безопасности
- IV. Основные принципы этикета государственного служащего
- VIII. Принципы развивающего обучения.
- А.7 Устройство и принципы действия адсорбционных аппаратов
- Аварии на объектах обустройства

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
