Основные элементы управления манипуляторами робототехники. Сервомеханизмы
Типы сервомеханизмов
Классификация сервомеханизмов может быть проведена по целому ряду признаков. Прежде всего сервомеханизмы подразделяются по типу исполнительных устройств - на электрические, гидравлические и пневматические (табл. 3.1). Исполнительными устройствами (приводами) соответственно являются электромотор, гидравлический двигатель или гидравлический цилиндр и пневматический цилиндр. Поскольку в современных конструкциях гидравлических сервомеханизмов важную роль играют также и электрические элементы, такие сервомеханизмы часто называют электрогидравлическими. Другой распространенный способ классификации основывается на методах обработки входных сигналов и управляющей информации. В зависимости от того, в аналоговой или в цифровой форме осуществляется обработка поступающей информации, различают два типа сервомеханизмов - аналоговый и цифровой.
Таблица 3.1. Сравнительная характеристика трех типов сервосистем
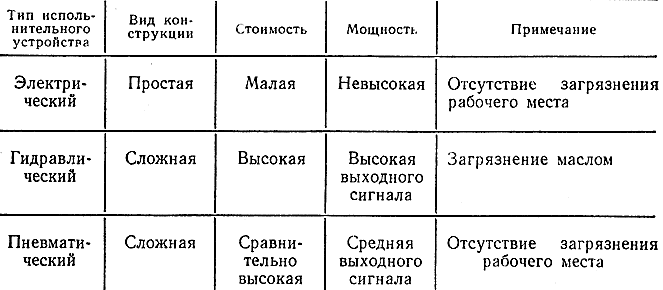
Рис. 3.1. Принцип работы сервомеханизма (для случая, когда управляемой величиной является угол θ)
Рис. 3.2. Структурные блок-схемы систем автоматического управления, а - разомкнутая система управления; б - замкнутая система управления
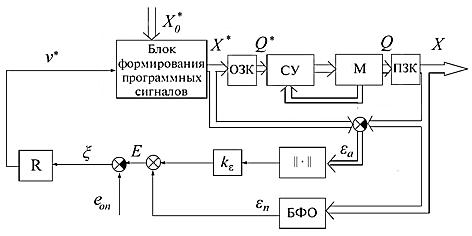
Рисунок. Обобщенная структурная схема системы автоматического формирования
желаемой скорости движения СТС манипулятора по заданной траектории.
Системы управления манипулятором промышленного робота.
| Рис. 3.3. Способы управления манипулятором промышленного робота. а - ручное управление в релейном режиме; б - замкнутая автоматическая система управления с компьютером в контуре управления. 1 - позиционная обратная связь, реализуемая с помощью органов зрения человека-оператора; 2 - панель управления; 3 - манипулятор робота; 4 - релейный сигнал управления привода электродвигателем; 5 - компьютер; 6 - задающее напряжение р1на вход электродвигателя привода; 7 - потенциометр; 8 - сигнал позиционной обработки связи |
Рис. 3.4. Принцип работы сервосистемы промышленного робота, управляемого от компьютера
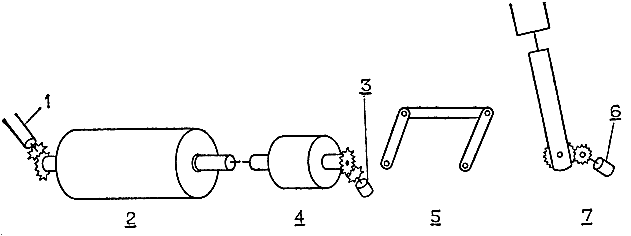
Рис. 3.5. Различные способы размещения датчиков для измерения выходных значений угла и скорости вращения вала управляемого привода. 1 - тахогенератор; 2 - электромотор; 3 - потенциометр А; 4 - редуктор; 5 - механизм передачи усилия (кинематическая цепь); 6 - потенциометр В; 7 - манипулятор
Рис. 3.6. Применение преобразования Лапласа для решения систем дифференциальных уравнений
Дата добавления: 2021-02-19; просмотров: 244;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- B. Департаменты и управления функционального характера.
- II. Основные положения
- II. Основные характеристики микроскопа.
- II. Языкознание и его основные разделы.
- III. Основные направления развития воспитания
- III. Основные требования к организации рассмотрения обращений граждан
- III. Основные функции ГФС России

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
