Конструкция и принцип действия и регулировка механизма движения нитепритягивателя машины 97-А кл. ОЗЛМ
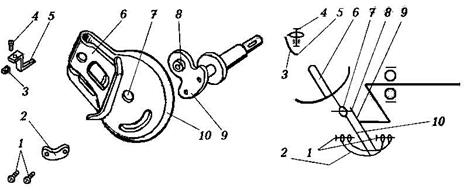
Конструкция. В машине 97-А кл. применяется кулачковый вращающийся нитепритягиватель 10(рис. 34). Отверстием 7 он надет на цилиндрический выступ 8 пальца кривошипа 9 и через прокладку 2 винтами 1 прикреплен к приливу пальца кривошипа 9. К фронтальной доске винтом 4 и гайкой 3 прикреплен нож 5, предназначенный для обрезки нитки при ее обрыве, чтобы устранить ее наматывание на кулачок 6 нитепритягивателя 10.
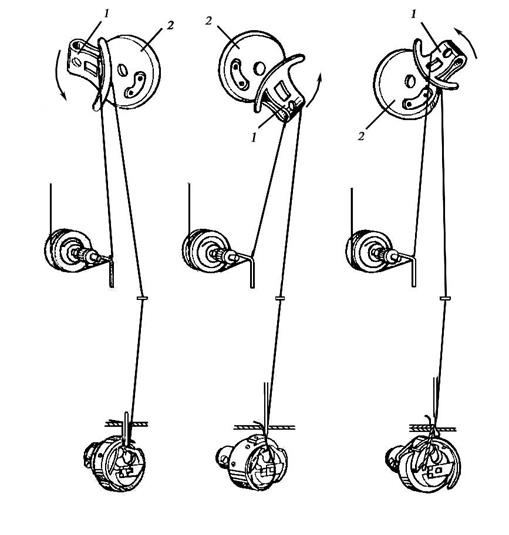
Принцип действия. Рассматривая работу нитепритягивателя, мы видим, что при движении кулачка нитепритягивателя 2 по верхней, левой и нижней частям траектории движения пальца кривошипа 1 (рис. 35, а) происходит подача нитки игле и челноку. В начале движения кулачка по правой части траектории движения пальца кривошипа (рис. 35, б) начинает выбираться нитка из челночного комплекта; в конце движения (рис. 35, в) происходит затягивание стежка.
 Регулировка. Своевременность подачи нитки или затягивания стежка регулируется поворотом нитепритягивателя 10(см. рис. 34) после ослабления винтов 1: при повороте нитепритягивателя 10 против часовой стрелки затягивание стежка начнется раньше.
Регулировка. Своевременность подачи нитки или затягивания стежка регулируется поворотом нитепритягивателя 10(см. рис. 34) после ослабления винтов 1: при повороте нитепритягивателя 10 против часовой стрелки затягивание стежка начнется раньше.
Карта № 4-3
Дата добавления: 2020-10-25; просмотров: 715;
Поиск по сайту
Узнать еще
- I. Понятие о принципах обучения, их взаимосвязь.
- II. Ситуационные (нестандартные) движения
- III. Механизм действия ионизирующих излучений на биологические структуры
- III. Механизмы, средства и методы психологического воздействия.
- III. Общий принцип сочетания методов в процессе обучения.
- III. Части речи и принципы их классификации
- IP (Internet Protocol) – протокол межсетевого взаимодействия
- IV. Критерии и принципы обеспечения безопасности

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
