ПРИНЦИПЫ ОПТИМАЛЬНОЙ ЛИНЕЙНОЙ ФИЛЬТРАЦИИ СИГНАЛА НА ФОНЕ ПОМЕХ
Выделение сигнала из помех является одной из важнейших задач, которые необходимо решить при разработке практически любой системы передачи информации. Критерий качества такого выделения сильно варьируется в зависимости от назначения системы. Так, при передаче аудио- или видеосигнала важно обеспечить минимально возможное искажение его формы, а в радиолокационной аппаратуре — установить факт наличия отраженного сигнала и определить момент его прихода.
Помимо критериев качества, различными являются также наши знания о структуре полезных сигналов и шумов и, соответственно, используемые для их представления математические модели. Поэтому не существует единственно «оптимального» устройства, во всех случаях обрабатывающего сигнал наилучшим образом. Понятие оптимальности имеет смысл только в связи с конкретной постановкой задачи, т. е. для конкретной комбинации критерия качества, моделей сигналов и шумов.
В данной главе рассматриваются некоторые классические задачи обработки сигналов и соответствующие оптимальные фильтры.
5.1. СОГЛАСОВАННАЯ ФИЛЬТРАЦИЯ ДЕТЕРМИНИРОВАННОГО СИГНАЛА
Пусть форма обрабатываемого сигнала заранее известна, и нам нужно определить лишь факт присутствия сигнала на фоне шумов.
В этом случае фильтр должен вместо сохранения формы сигнала обеспечить его максимальный (по сравнению с шумом) уровень на выходе. Критерием качества обработки в данном случае может служить отношение сигнал/шум, определяемое как

где |s(t)|max — максимальное абсолютное значение сигнала, σ — среднеквадратичное значение шума.
Итак, теперь можно сформулировать задачу об оптимальной фильтрации детерминированного (полностью известного) сигнала. Пусть на вход фильтра поступает аддитивная смесь сигнала и шума:
где s1(t) — детерминированный сигнал, который нужно обнаружить; n1(t) — стационарный нормальный центрированный белый шум с двусторонней спектральной плотностью мощности W0. На выходе линейного фильтра также будет присутствовать аддитивная смесь сигнала s2(t) и шума n2(t):
Требуется найти такой линейный фильтр, который обеспечит в некоторый момент времени to максимальное отношение сигнал/шум на выходе:

Как было показано в §4.1, детерминированная составляющая выходного сигнала фильтра в момент t может быть рассчитана по следующей формуле:

где h(t) — импульсная характеристика фильтра.
В курсе математики доказывается неравенство Коши-Буняковского, согласно которому

причем максимум левой части (равенство) достигается только в том случае, если функции f(х) и g(x) пропорциональны друг другу:

Применив неравенство (5.4) к правой части формулы (5.3), имеем
Равенство, согласно (5.5), будет достигаться, если

где А — постоянный коэффициент, имеющий размерность В-1 с-1= Гц/В (ведь импульсная характеристика имеет размерность частоты, т. е. 1/с). Выполнив замену переменной t = t0 – τ, формулу (5.6) можно переписать в виде

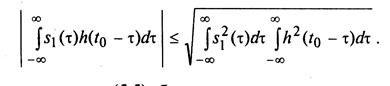
Фильтр, обладающий такой импульсной характеристикой, называется согласованным фильтром для сигнала s1(t). Как видно из (5.7), импульсная характеристика согласованного фильтра представляет собой сдвинутую на t0 и зеркально перевернутую во времени копию входного сигнала (рис. 5.1).
Если входной шум n1(t) является белым, то согласованный фильтр оказывается также и оптимальным, т. е. реализующим условие (5.2). С доказательством этого факта можно ознакомиться, например, в [3, гл. 13].
Поскольку импульсная характеристика физически реализуемой цепи должна равняться нулю при t < О, значение t0 не может быть меньше длительности входного сигнала, а так как tо соответствует
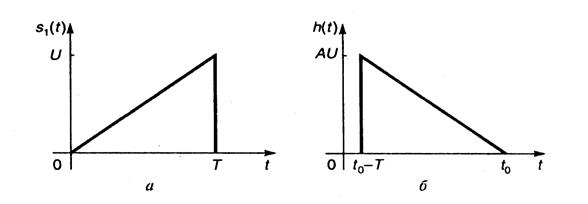
Рис. 5.1. Сигнал (а) и импульсная характеристика согласованного с ним фильтра (б)
максимальному выходному сигналу, этот максимум достигается после окончания воздействия полезного сигнала s1(t) на вход фильтра, т. е. для обеспечения максимального отклика фильтр должен обработать весь входной сигнал.
Получим выражение для комплексного коэффициента передачи согласованного фильтра. Преобразование Фурье импульсной характеристики (5.7) дает
Используем замену переменной t' = t0 — t. С учетом этого

Получившийся интеграл представляет собой спектральную функцию сигнала s1(t) на частоте -ω. Но согласно свойствам спектра вещественного сигнала S1(—ω) =  (ω), поэтому окончательно для коэффициента передачи согласованного фильтра имеем
(ω), поэтому окончательно для коэффициента передачи согласованного фильтра имеем

Полученной формуле можно дать наглядную физическую трактовку. Рассмотрим, какие преобразования производит согласованный фильтр с фазовым спектром сигнала. Пусть фазовый спектр входного сигнала равен φ1(ω):
Согласно (5.8) фаза коэффициента передачи согласованного фильтра может быть представлена как

Таким образом, фазовый спектр выходного сигнала будет иметь вид

а это означает, что в момент t0 все спектральные составляющие сигнала складываются на выходе синфазно, образуя пик выходного отклика. Это называется компенсацией начальных фаз. Механизм компенсации начальных фаз иллюстрируется на рис. 5.2.
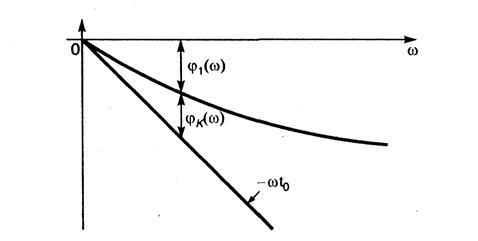
Рис. 5.2. Механизм компенсации начальных фаз при согласованной фильтрации
Модуль коэффициента передачи, как следует из (5.8), повторяет .форму модуля спектральной плотности сигнала s1(t):
Таким образом, коэффициент передачи велик на тех частотах, где сосредоточена основная часть энергии полезного сигнала, и мал там, где мала спектральная плотность. Сочетание компенсации начальных фаз с увеличением амплитуды сильных спектральных составляющих сигнала и обеспечивает оптимальность согласованного фильтра для регистрации сигнала на фоне белого шума.
5.2. ОТНОШЕНИЕ СИГНАЛ/ШУМ НА ВХОДЕ И ВЫХОДЕ СОГЛАСОВАННОГО ФИЛЬТРА
Определим отношение сигнал/шум на входе и выходе согласованного фильтра, воспользовавшись определением (5.1). В качестве модели для n1(t) мы использовали белый шум, дисперсия которого бесконечно велика, поэтому

Для того чтобы найти выходное отношение сигнал/шум, необходимо предварительно определить вид полезного выходного сигнала. Сигнал на выходе линейной стационарной цепи с импульсной характеристикой h(t) определяется как
Подставим сюда выражение (5.7) для импульсной характеристики:

где  — корреляционная функция сигнала s1(t).
— корреляционная функция сигнала s1(t).
Таким образом, выходной сигнал согласованного фильтра представляет собой (с точностью до масштабного множителя А) сдвинутую во времени на t0 корреляционную функцию сигнала s1(t). Как известно, максимальное значение корреляционной функции детерминированного сигнала достигается при τ = 0 и равно его энергии:
где  — энергия сигнала S1(t). Итак, максимальное
— энергия сигнала S1(t). Итак, максимальное
значение сигнала на выходе согласованного фильтра достигается при t=tо и равно АЕ1.
Теперь необходимо рассчитать уровень шума на выходе. Спектральная плотность мощности шума на выходе линейной цепи может быть получена путем умножения спектральной плотности мощности входного шума на квадрат модуля коэффициента передачи:

где W0 — двусторонняя спектральная плотность мощности входного белого шума. Дисперсия определяется через интеграл от выходного спектра шума:

Но согласно равенству Парсеваля (1.57]
Таким образом, окончательно для среднеквадратичного значения шума получаем

Теперь можно получить выходное отношение сигнал/шум:

Итак, отношение сигнал/шум на выходе согласованного фильтра не зависит от формы обрабатываемого сигнала, а определяется лишь его энергией и спектральной плотностью мощности входного белого шума.
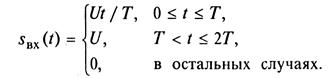
Пример. Сигнал в виде несимметричного трапециевидного импульса (рис. 5.3, а) обрабатывается с помощью согласованного фильтра. Спектральная плотность мощности белого шума равна W0 = 3*10-12 В2с, половина длительности сигнала Т= 9 мкс. Определим, при какой амплитуде импульса на выходе фильтра будет достигнуто отношение сигнал/шум, равное 10.
Для решения данной задачи прежде всего необходимо определить энергию обрабатываемого сигнала, а это, в свою очередь, требует аналитической записи сигнала:
Теперь можно рассчитать интересующую нас энергию:
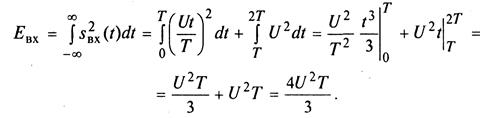
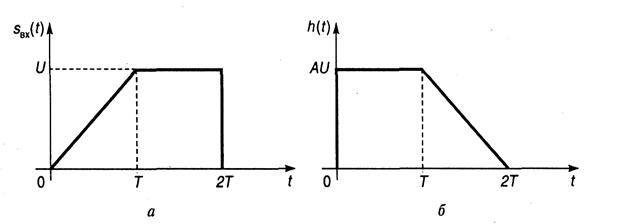
Рис. 5.3. Трапециевидный импульс (а) и импульсная характеристика согласованного с ним фильтра (б)
Чтобы получить выходное отношение сигнал/шум, воспользуемся формулой (5.9):

Осталось лишь выразить искомую амплитуду U через исходные данные задачи:
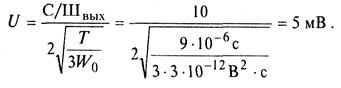
Итак, для получения требуемого отношения сигнал/шум на выходе амплитуда входного импульса должна быть равна 5 мВ. На рис. 5.3, б показана импульсная характеристика фильтра, согласованного с данным сигналом.
5.3. ПРИМЕНЕНИЕ СОГЛАСОВАННЫХ ФИЛЬТРОВ
Рассмотрев идею согласованной фильтрации детерминированных сигналов, обсудим возможные области применения таких фильтров и некоторые связанные с этим вопросы.
Повышение разрешения по дальности в локационных системах.
Напомним вкратце принцип действия радиолокационных систем. Передатчик излучает зондирующий импульс, он доходит до цели, отражается от нее и, многократно ослабленный, в смеси с шумом поступает на вход приемника.
Для обнаружения цели нужно зафиксировать факт присутствия отраженного сигнала на входе, а для определения расстояния до цели — измерить задержку между зондирующим и отраженным импульсами.
Так как форма излучаемого импульса известна, для обнаружения отраженного сигнала нужно использовать согласованный фильтр, позволяющий максимизировать отношение сигнал/шум на выходе.
Если имеются две близко расположенные цели, для их разрешения необходимо, чтобы два отраженных сигнала воспринимались раздельно. Поэтому желательно иметь выходной сигнал согласованного фильтра в виде как можно более узкого пика. Этого можно достичь, уменьшая длительность излучаемого импульса, но при этом падает его энергия и, следовательно, отношение сигнал/шум при приеме. Чтобы энергия не уменьшалась, необходимо одновременно с укорочением импульса увеличивать его амплитуду. Однако это нельзя делать бесконечно — электрическая прочность элементов выходного каскада передатчика имеет предел.
Но существует и иной путь решения проблемы. Вспомним, что выходной сигнал согласованного фильтра по форме совпадает с корреляционной функцией обнаруживаемого сигнала, а последняя, в , свою очередь, связана преобразованием Фурье с энергетическим спектром. Таким образом, для получения узкого пика на выходе согласованного фильтра необходимо расширять спектр сигнала. Как известно, эффективная ширина спектра сигнала и его длительность связаны соотношением неопределенности (см. § 1.5)

Сигналы, для которых соотношение неопределенности (5.10) близко к равенству, называются простыми. Однако поскольку ширина спектра определяется внутриимпульсной структурой сигнала, существуют сигналы с той же энергией, для которых

Такие сигналы называют сложными. Само произведение эффективных значений ширины спектра и длительности называют базой сигнала:
Соответственно, простые сигналы называют также сигналами с малой базой, а сложные — сигналами с большой базой.
Сложные сигналы. Таким образом, можно увеличить разрешение по дальности, не уменьшая длительности сигнала, за счет введения внутриимпульсной модуляции. Из-за расширения спектра корреляционная функция (которая по форме совпадает с выходным сигналом согласованного фильтра) сужается.
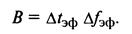
Сложным сигналом является рассмотренный в § 2.6 ЛЧМ-радиоимпульс. Другими примерами сложных сигналов могут служить, в частности, коды Баркера. График сигнала, манипулированного 13-элементным кодом Баркера, показан на рис. 5.4, а, а его корреляционная функция — на рис. 5.4, б. Пунктиром на рис. 5.4, б изображен график корреляционной функции прямоугольного импульса с такими же длительностью и энергией.
Из рисунка видно, что корреляционная функция представляет собой узкий пик, окруженный боковыми лепестками малого уровня. Коды Баркера обеспечивают минимально возможный относи-
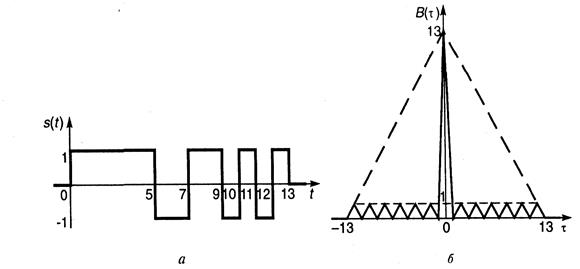
Рис. 5.4. Сложный сигнал:
о — сигнал, манипулированный 13-элементным кодом Баркера, б — его корреляционная функция
тельный уровень боковых лепестков, равный 1/N, где N — число элементов кода. К сожалению, такие коды существуют лишь для длин 2, 3, 4, 5, 7, 9, 11 и 13 элементов..
Есть и другие классы сигналов с «хорошими» корреляционными функциями.
Скрытная передача сигналов. Тот факт, что отношение сигнал/шум на выходе согласованного фильтра определяется лишь энергией полезного сигнала и не зависит от его формы, позволяет «замаскировать» сигнал, «спрятав» его в шумах.
.Действительно, если сильно уменьшить амплитуду полезного сигнала, соответственно увеличив при этом его длительность, чтобы сохранить энергию постоянной, сигнал перестанет визуально выделяться на фоне шумов (рис. 5.5, а). Так как энергия сигнала не изменилась, отношение сигнал/шум на выходе согласованного фильтра останется прежним.
Однако если сигнал имеет простую форму, т. е. небольшую базу, такая «маскировка» во временной области приведет к сильному
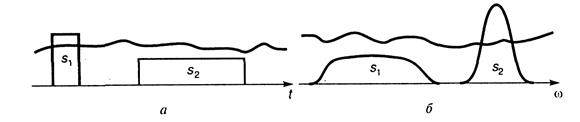
Рис. 5.5. Сигналы с малой базой: маскировка во временной области (о) приводит к легкому обнаружению в частотной области (б) и наоборот

Рис. 5.6. Сигнал с большой базой может быть замаскирован одновременно во временной (а) и частотной (б) областях
сужению спектра сигнала. Так как энергия остается неизменной, на тех частотах, где сосредоточен спектр сигнала, его спектральная плотность будет значительно превышать (по модулю) спектральную плотность шума (рис. 5.5, б). Такой сигнал замаскирован во временной области, но легко обнаруживается в спектральной области.
Если одновременно с удлинением сигнала ввести внутриимпульсную модуляцию, можно избежать сужения спектра и «скрыть» сигнал под шумами как во временной, так и в спектральной области (рис. 5.6, о, б).
К применяемым на практике сложным радиосигналам относятся:
• частотно-модулированные (ЧМ) радиосигналы;
• фазоманипулированные (ФМн) радиосигналы. §
Для ЧМ-сигналов наиболее распространены следующие законы изменения частоты:
• квадратичная ЧМ;
• линейная ЧМ (ЛЧМ);
• V-образная ЧМ.
Соответствующие этим законам графики зависимости мгновенной частоты от времени показаны на рис. 5.7, а, а графики самих \сигналов — на рис. 5.7, б. На рис. 5.8 показан вид корреляционной функции сигнала с линейной частотной модуляцией.
Рис. 5.7. Сложные сигналы с различными законами изменения частоты
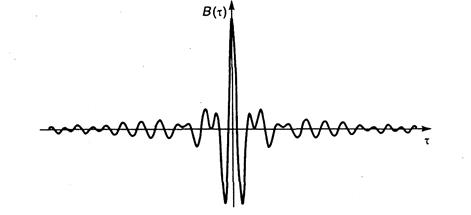
Рис. 5.8. Корреляционная функция сигнала с линейной частотной модуляцией
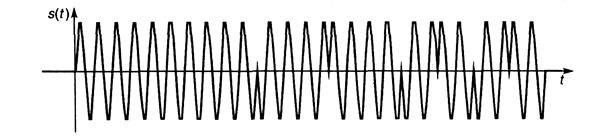
Рис. 5.9. Радиосигнал, манипулированный по фазе 13-элементным кодом Баркера
В качестве примера ФМн-радиосигнала на рис. 5.9 показан сигнал, манипулированный по фазе 13-элементным кодом Баркера.
Коррелятор. В случае применения согласованного фильтра для обнаружения сигнала приемная система должна выглядеть так, как показано на рис. 5.10. Сигнал, получаемый на выходе согласованного фильтра, сравнивается с некоторым порогом, и в случае превышения порога принимается решение о наличии полезного сигнала на входе.
Однако при использовании сигналов сложной формы согласованный фильтр трудно реализовать. В этом случае можно исполь-

Рис. 5.10. Обнаружитель детерминированного сигнала на основе согласованного фильтра
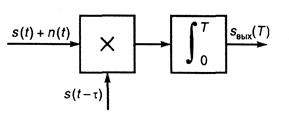
Рис. 5.11. Коррелятор
звать показанное на рис. 5.11 устройство, называемое корреля-пором.
Оно включает в себя перемножитель, на один вход которого подается принимаемый сигнал s(t) + n(t), а на другой —сформированный в приемном устройстве опорный сигнал s(t — τ), форма которого повторяет форму обнаруживаемого сигнала. После дикла интегрирования на выходе будем иметь

где А — некоторая константа.
Если задержка между принимаемым и опорным сигналами отсутствует (τ = 0), а время интегрирования Т равно длительности |сигнала s(t), то мы получим

Легко убедиться, что это совпадает с выходным сигналом согласованного фильтра в момент окончания полезного сигнала на входе. Таким образом, коррелятор может давать на выходе то же, что и согласованный фильтр, и, следовательно, его заменять. Однако при этом необходимо знать время прихода полезного сигнала на вход, что невозможно (если время прихода сигнала известно, не имеет смысла его обнаруживать).
Замечание 1
Говорят, что согласованный фильтр инвариантен к моменту прихода входного сигнала, а коррелятор неинвариантен к моменту прихода входного сигнала.
Решить эту проблему можно, построив многоканальную схему и подавая в разные каналы опорный сигнал с разной задержкой по времени (рис. 5.12).
На выходах корреляторов разных каналов, согласно (5.11), будут формироваться отсчеты корреляционной функции BS1(τ) для разных значений τ. При наличии полезного сигнала на входе выходной сигнал того канала, опорный сигнал которого имеет минимальную задержку относительно принимаемого, будет максимален.
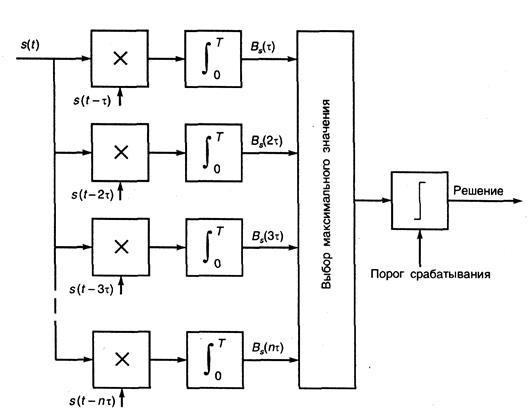
Рис. 5.12. Многоканальный коррелятор
Поэтому для обнаружения сигнала необходимо после выполнения цикла интегрирования сравнить между собой выходные сигналы всех каналов, выбрать из них максимальный и сравнить его с порогом (см. рис. 5.12). В случае превышения порога принимается решение о наличии полезного сигнала на входе, а номер канала, соответствующий максимуму, дает оценку времени его прихода.
Для сложных сигналов реализовать схему, показанную на рис. 5.12, часто оказывается проще, чем согласованный фильтр (см. рис. 5.10).
Необходимое число каналов и временной сдвиг опорного сигнала между соседними каналами определяются формой корреляционной функции обнаруживаемого сигнала и общими требованиями к системе (возможным диапазоном времени прихода принимаемого сигнала и необходимой точностью измерения этого времени).
Замечание 2
Для радиосигналов, имеющих быстроосциллирующее внутреннее заполнение, такая система сильно усложняется,
так как временной сдвиг опорного сигнала между соседними каналами в данном случае будет определяться именно перио дом этого заполнения, что приведет к резкому увеличению необходимого числа каналов.
5.4. ОПТИМАЛЬНАЯ ФИЛЬТРАЦИЯ ПРИ НЕБЕЛОМ ШУМЕ
В § 5.1 был рассмотрен согласованный фильтр, осуществляющий
оптимальную обработку детерминированного сигнала в том случае, «ели шум является белым. Теперь рассмотрим более общий случай, когда шумовой случайный процесс имеет произвольную спектральную ПЛОТНОСТЬ МОЩНОСТИ W1(ω).
Простейшее и само собой напрашивающееся решение состоит в том, чтобы предварительно «обелить» шум с помощью фильтра,
коэффициент передачи которого K1(ω) выбран так, чтобы компенсировать неравномерность спектра входного шума (рис. 5.13):
и, следовательно,

где W0 — произвольная константа.
Полезный сигнал s1(f) на выходе этого фильтра будет, очевидно, иметь спектральную плотность, равную

Итак, на выходе «обеляющего» фильтра мы имеем белый шум со спектральной плотностью мощности W0 и измененный полезный сигнал s1'(t). Так как шум белый, можно использовать рассмотренный в § 5.1 фильтр, согласованный с сигналом s1(t), комплексный коэффициент передачи которого, согласно (5.8), равен

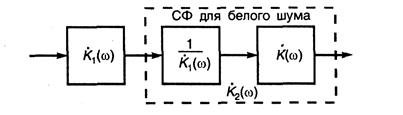
Рис. 5.13. Структура оптимального фильтра для детерминированного сигнала в случае небелого шума
где tо' — длительность сигнала s1(t) на выходе первого фильтра; to'  t0 (t0 — длительность входного сигнала).
t0 (t0 — длительность входного сигнала).
Общий коэффициент передачи полученной таким образом системы будет равен

Воспользовавшись (5.12), окончательно имеем

Фильтр К2(ω), безусловно, оптимален для обнаружения сигнала s1'(t) в белом шуме, но еще неизвестно, является ли полученная таким образом составная схема в целом оптимальной для решения первоначально поставленной задачи, т. е. для обнаружения сигнала s1'(t) в шуме со спектром W1(ω). Докажем оптимальность схемы рис. 5.13 методом «от противного».
Предположим, что существует фильтр с коэффициентом передачи K(ω), обеспечивающий при подаче на вход аддитивной смеси сигнала s1(t) и шума со спектральной плотностью W1(ω) большее выходное отношение сигнал/шум, чем схема, показанная на рис. 5.13. Представим коэффициент передачи такого фильтра в виде
Пусть K1(ω) является коэффициентом передачи «обеляющего» фильтра, т. е. удовлетворяет условию (5.12). На выходе этого фильтра будет получен сигнал S1'(t) и белый шум со спектральной плотностью W0, т. е. те же условия, что и на выходе первого фильтра на рис. 5.13.
Так как отношение сигнал/шум на выходе, согласно сделанному предположению, должно быть больше, чем для рассмотренной схемы (см. рис. 5.13), то фильтр с комплексным коэффициентом передачи
К(ω) /К1(ω) обеспечивает при подаче на вход аддитивной смеси сигнала s1(t) и белого шума большее отношение сигнал/шум, чем фильтр, согласованный с сигналом s1(t), что невозможно. Полученное противоречие доказывает, что схема, показанная на рис. 5.13, имеющая коэффициент передачи (5.14), действительно является оптимальной для обнаружения детерминированного сигнала в шуме с известной спектральной плотностью мощности.
Рассчитаем для данного случая выходное отношение сигнал/шум. Так как второй фильтр согласован с сигналом s1(t), то, в соответствии с (5.9), это отношение может быть представлено как

где Е  (t)dt — энергия сигнала s1(t), a Wo — спектральная
(t)dt — энергия сигнала s1(t), a Wo — спектральная
плотность белого шума после «обеляющего» фильтра.
Согласно равенству Парсеваля энергия сигнала s1'(t) может быть рассчитана и в спектральной области:
Подставив сюда выражения (5.13) для спектра S1(ω) и (5.12) для коэффициента передачи К1(ω), имеем

Подставив этот результат в (5.15), окончательно получаем

Таким образом, в общем случае выходное отношение сигнал/шум определяется «взвешенной» в частотной области энергией обрабатываемого полезного сигнала; весовая функция при этом обратно пропорциональна спектральной плотности мощности шума.
Замечание
Легко видеть, что при W(ω) = const формула (5.16) превращается в полученное ранее для случая белого шумя выражение (5.9).
5.5. КВАЗИОПТИМАЛЬНАЯ ФИЛЬТРАЦИЯ ДЕТЕРМИНИРОВАННОГО СИГНАЛА
Во многих случаях точная реализация согласованного фильтра оказывается сложной, а подчас и неразрешимой задачей. В таких ситуациях можно использовать следующий подход: выбрать относительно узкий класс физически и конструктивно реализуемых фильтров и отыскать в пределах этого класса такие значения параметров фильтра, которые обеспечивают максимальное отношение сигнал/шум на выходе. Это отношение, разумеется, окажется заведомо хуже, чем при использовании согласованного фильтра. Однако при обработке сигналов простой формы проигрыш может быть невелик. Выбранный указанным образом фильтр называется квазиоптимальным.
Рассмотрим конкретный пример — отыщем квазиоптимальный фильтр для обработки прямоугольного импульса (рис. 5.14). Класс рассматриваемых фильтров ограничим простейшими интегрирующими RС-цепями (см. рис. 4.2). У такой цепи имеется единственный параметр — постоянная времени τ = RC, которую нам и нужно оптимизировать, чтобы добиться максимального отношения сигнал/шум на выходе, определяемого согласно (5.1).
Импульсная характеристика интегрирующей RС-цепи была получена в §4.4 (см. формулу (4.19)), а прохождение через такую цепь прямоугольного видеоимпульса было проанализировано в § 4.5 (см. пример 1 и формулу (4.25)). Выходной сигнал цепи показан на рис. 5.14 пунктирной линией.
Легко видеть, что максимальное значение выходного сигнала достигается в момент t = Т и равно

Теперь необходимо рассчитать среднеквадратичное значение выходного шума, что проще сделать, используя спектральный метод.
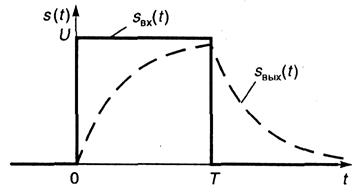
Рис. 5.14. Прохождение прямоугольного импульса через интегрирующую RC-цепъ
Комплексный коэффициент передачи интегрирующей
ЛС-цепи с постоянной времени τ равен (см. § 4.4)
При подаче на вход белого шума с двусторонней спектральной плотностью мощности W0 выходной случайный процесс будет иметь спектральную плотность мощности, рассчитываемую как

Дисперсия выходного шума, согласно теореме Винера— Хинчина, пропорциональна интегралу от спектральной плотности мощности (5.17):

Произведем замену переменной х = ωτ и учтем, что

Итак, искомое среднеквадратичное отклонение выходного шума составляет

Теперь можно записать выражение для отношения сигнал/шум:

Для получения квазиоптимального фильтра нам необходимо отыскать то значение постоянной времени τ, при котором выходное отношение сигнал/шум максимально. Перепишем (5.19) в следующем виде:

Величина U2T равна энергии входного прямоугольного импульса, поэтому первый множитель в (5.20) представляет собой, согласно (5.9), отношение сигнал/шум на выходе согласованного фильтра. Следовательно, оставшаяся часть (5.20) является безразмерным множителем, характеризующим проигрыш квазиоптимального фильтра согласованному. Как видно из (5.20), этот проигрыш зависит от соотношения τ/T между постоянной времени RС-цепочки и длительностью импульса. Обозначим это отношение буквой х. С учетом сказанного нам необходимо найти максимум следующей функции:

К сожалению, приравнивание к нулю производной функции (5.21) приводит к трансцендентному уравнению, не имеющему аналитического решения. График функции f(x) приведен на рис. 5.15. Использование численных методов решения уравнений позволяет определить, что максимальное значение функции f(х) достигается при х = 0,7959 и равно 0,9025.
Итак, для получения максимального отношения сигнал/шум на выходе при обработке смеси прямоугольного импульса и белого шума постоянная времени интегрирующей RС-цепи должна составлять примерно 0,8 от длительности импульса. Проигрыш согласованному фильтру составляет при этом около 10 %.
Как отмечалось в §5.1, форма импульсной характеристики согласованного фильтра повторяет форму обрабатываемого сигнала, перевернутого во времени. Поэтому разумно предположить, что для получения лучших результатов форма импульсной характеристики квазиоптимального фильтра должна быть «похожа» на форму обрабатываемого сигнала. Таким образом, можно ожидать, что от интегрирующей RС-цепи можно получить меньший проигрыш согласованному фильтру при обработке не прямоугольного, а треугольного несимметричного импульса (на рис. 5.16 приведены графики такого импульса и импульсной характеристики RС-цепи). Проверим это.
Поскольку на входе действует все тот же белый шум, можно
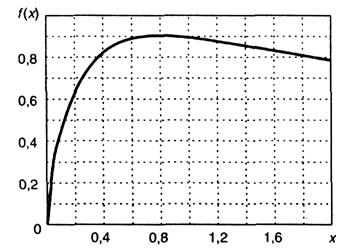
Рис. 5.15. Зависимость проигрыша интегрирующей RС-цепи согласованному фильтру от соотношения между постоянной времени цепи и длительностью обрабатываемого прямоугольного импульса
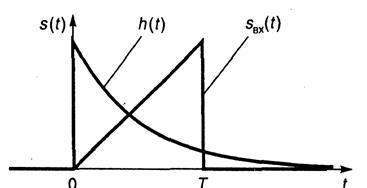
Рис. 5.16. Входной треугольный импульс и импульсная характеристика интегрирующей RС-цепи
воспользоваться уже полученным результатом (5.18) для среднеквадратичного значения выходного шума. Заново необходимо рассчитать лишь пиковое значение выходного сигнала.
На интервале времени от 0 до Т выходной сигнал рассчитывается как

При t > Т выходной сигнал равен

! Графики входного и выходного сигналов приведены на I рис. 5.17. Максимальное значение выходного сигнала, так же как и : в случае прямоугольного импульса, достигается при t = Т. Согласно (5.22) и (5.23), это максимальное значение равно

Теперь можно рассчитать выходное отношение сигнал/шум:

Перепишем (5.24) таким образом, чтобы выделить в нем множитель, равный отношению сигнал/шум на выходе согласованного фильтра. Прежде всего заметим, что энергия нашего треугольного импульса равна
С учетом этого можно записать (5.24) в следующем виде:
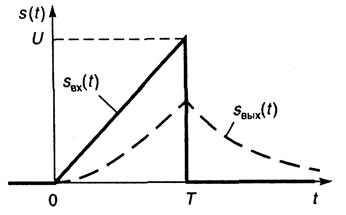
Рис. 5.17. Прохождение треугольного
импульса через интегрирующую
ЛС-цепь
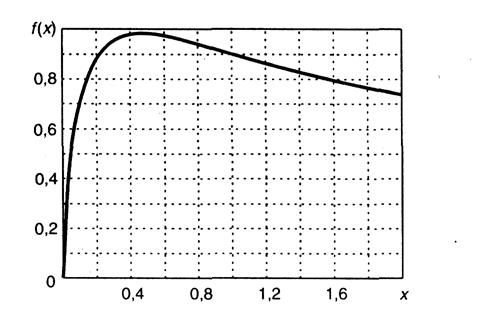
Рис. 5.18. Зависимость проигрыша интегрирующей RС-цепи согласованному фильтру от соотношения между постоянной времени цепи и длительностью обрабатываемого треугольного импульса
Первый множитель в (5.25) представляет собой отношение сигнал/шум на выходе согласованного фильтра, а оставшаяся часть характеризует проигрыш квазиоптимального фильтра согласованному, зависящий от отношения τ/T. Обозначив это отношение буквой х, запишем функцию проигрыша:

Как и в случае прямоугольного импульса, максимум выражения (5.26) невозможно найти аналитически. График этой функции приведен на рис. 5.18. Численное решение уравнения Дх) = 0 показывает, что максимум достигается при х = 0,4653 и равен 0,9841.
Итак, для квазиоптимальной фильтрации треугольного импульса постоянная времени интегрирующей RС-цепи должна составлять 0,47 от длительности импульса. Проигрыш согласованному фильтру при этом равен 1,6 %.
Благодаря тому, что импульсная характеристика интегрирующей RС-цепи ближе по форме к треугольному импульсу, чем к прямоугольному, в случае треугольного сигнала мы получили лучшее приближение к согласованному фильтру (проигрыш составил 1,6 % вместо 10 %).
В заключение отметим, что столь малый проигрыш согласованному фильтру в рассмотренных примерах был получен лишь благодаря простой форме обрабатываемых сигналов. Для сложных сигналов реализовать квазиоптимальные фильтры в виде простых цепей и обеспечить при этом малый проигрыш согласованном; фильтру не представляется возможным.
5.6. ОПТИМАЛЬНАЯ ФИЛЬТРАЦИЯ СЛУЧАЙНЫХ СИГНАЛОВ
Рассмотрим теперь другую задачу обработки сигналов. Пусть случайным является не только шум, но и полезный сигнал. Такая ситуация часто встречается, поскольку, строго говоря, любой сигнал, несущий какую-либо информацию, является случайным. Входной сигнал в этом случае можно записать следующим образом:
где  (t) — полезный случайный сигнал, n(t) — шум. Оба случайных процесса будем считать нормальными, стационарными, центрированными (M{ (t)} = M{n{t)} = 0) и статистически независимыми друг от друга. Двусторонние спектральные плотности мощности процессов (t) и n(t) равны соответственно W
(t) — полезный случайный сигнал, n(t) — шум. Оба случайных процесса будем считать нормальными, стационарными, центрированными (M{ (t)} = M{n{t)} = 0) и статистически независимыми друг от друга. Двусторонние спектральные плотности мощности процессов (t) и n(t) равны соответственно W  (ω) и Wn(ω).
(ω) и Wn(ω).
Изменим также и критерий качества обработки — пусть нам нужно по возможности очистить полезный сигнал (t) от шумов. Тогда мерой качества может служить ошибка воспроизведения полезного сигнала на выходе:
Так как предполагается, что рассматриваемый фильтр является линейной цепью с постоянными параметрами, то выходной сигнал Sвых(t) и сигнал ошибки e(t) также будут стационарными случайными процессами. Поэтому логично требовать минимальной дисперсии ошибки:
Дисперсия процесса e(t) связана с его математическим ожиданием и средним квадратом следующим образом:

Ясно, что М{е} = О, так как M{SВЬ1Х} = 0 (линейная цепь не нарушает центрированности процесса) и М{ }=0. Поэтому
где Rе(τ) — корреляционная функция сигнала ошибки e(t), a We(ω) — его спектральная плотность мощности.
Так как We(ω) 0, то стремление минимизировать D(e) означает необходимость минимизировать площадь под кривой We(  )
)
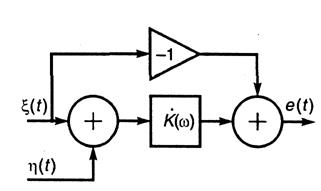
Рис. 5.19. Формирование сигнала ошибки при фильтрации случайного процесса
На рис. 5.19 приведена структурная схема, демонстрирующая формирование сигнала ошибки e(t). Эта схема линейна, поэтому коэффициенты передачи для сигнала (/) и шума n(t) можно легко определить, представив, что один из случайных процессов на входе отсутствует. Рассмотрим два варианта:
1) пусть n(t) = 0 (шум на входе отсутствует); для полезного сигнала (t) коэффициент передачи равен K(ω) - 1;
2) пусть ξ(t) = 0 (полезный сигнал на входе отсутствует); для шума n(t) коэффициент передачи равен
| <== предыдущая лекция | | | следующая лекция ==> |
| Primavera Project Planner (P3) | | | Прогноз МРП эксплуатации скважин на периодическом режиме |
Дата добавления: 2020-10-25; просмотров: 952;
Поиск по сайту
Узнать еще
- A — отношение сигнал/помеха.
- III. Части речи и принципы их классификации
- IV УСТРОЙСТВА ФИЛЬТРАЦИИ СИГНАЛОВ
- IV. Критерии и принципы обеспечения безопасности
- IV. Основные принципы этикета государственного служащего
- VIII. Принципы развивающего обучения.
- Z-преобразование синусной компоненты выходного сигнала связано с Z-преобразованием входного сигнала следующим соотношением
- А - с прямолинейной спинкой; б - с криволинейной спинкой; в - с канавкой удлиненной формы

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
