Исследование влияния отклонения напряжения на работу асинхронного двигателя
Изменения электрических нагрузок на промышленных предприятиях являются причиной отклонений и колебаний напряжения у потребителей электрической энергии. Отклонения напряжения оцениваются разностью фактического и номинального значения при детерминированом процессе или разностью среднего значения (математического ожидания) и номинального, усредненной за некоторый период времени.
Время усреднения обычно принимают равным рабочей смене, одним или нескольким суткам, неделе и даже месяцу. Если не принимаются меры по поддержанию отклонения напряжения в установленных ГОСТ 13109-87 (от –5 % до +5 % от Uн), то это приводит к народнохозяйственному ущербу.
У асинхронных двигателей составляющие ущерба связываются с дополнительными потерями в их элементах активной мощности, дополнительным потреблением реактивной мощности, сокращением срока службы изоляции, снижением производительности механизмов. Значение ущерба также зависит от коэффициента загрузки двигателя.
Рассмотрим влияние отклонения напряжения на составляющие и полные потери активной мощности в двигателе. Суммарные потери мощности в асинхронном двигателе SАРдв (в дальнейшем будем называть просто потерями) состоят из магнитных потерь в пикете магнитопровода статора SРст, потерь в меде обмотки статора SР1, потерь в меди обмотки ротора SР2, механических потерь SРмех и дополнительных потерь SРдоп
 (1)
(1)
В свою очередь
DР1 = З × I1 × r1,
где I1 – ток статора; r1– сопротивление обмотки статора.
DРст = DР0 – (DР10 + DРмех – DРдоп),
где DР10 – потери мощности в статорной обмотке при холостом ходе.
где I0 – ток в обмотке статора при холостом ходе.
В практических расчетах допускается принимать:
DРдоп = 0,005Рн;
DРмех = 0,01Рн.
При номинальном напряжении на зажимах двигателя потери DРст, DРмех и DРдоп не зависят от нагрузки, а потери DР1 и DР2 изменяют свою величину в зависимости от нагрузки.
При изменении же напряжения на зажимах двигателя DРст, DР1, DР2 зависят от изменения подводимого напряжения. Не учитывая падения напряжения в обмотке статора, можно считать
 (2)
(2)
где Е1 – ЭДС статорной обмотки; W1 – число витков статорной обмотки; f1 – частота тока питающей сети; Коб – обмоточный коэффициент; Фм – максимальный магнитный поток двигателя.
При уменьшении U1 в n раз уменьшается Е1, а, следовательно, магнитный поток Фм и магнитная индукция Вм двигателя во столько же раз. Потери в стали DРст, пропорциональные В2, уменьшаются в n2 раз (3)
 (3)
(3)
где s - постоянная зависящая от сорта стали.
Ток холостого хода I0, определяемый по кривой намагничивания и зависящий от магнитного потока Ф, будет уменьшаться. Вращающий момент асинхронного двигателя М может быть определен по формуле (4)
 (4)
(4)
где См – электромеханическая постоянная двигателя;  – приведенное значение тока ротора к току статора; cosY2 – косинус угла сдвига фаз между
– приведенное значение тока ротора к току статора; cosY2 – косинус угла сдвига фаз между  ; Е2 – ЭДС ротора.
; Е2 – ЭДС ротора.
При работе двигателя с нагрузкой, не превышающей номинальную, т.е. с малым скольжением, можно принять  » 1. Тогда потери в роторе будут состоять только из потерь в меди его обмотки
» 1. Тогда потери в роторе будут состоять только из потерь в меди его обмотки
 (5)
(5)
где  – приведенное сопротивление обмотки ротора.
– приведенное сопротивление обмотки ротора.
Уменьшение магнитного потока двигателя Ф в выражении (4) при моменте двигателя М = const вызовет увеличение тока и  , следовательно, потерь
, следовательно, потерь  . Скорость вращения ротора n2 при этом уменьшится и двигатель будет работать на новой механической характеристике с увеличением скольжения.
. Скорость вращения ротора n2 при этом уменьшится и двигатель будет работать на новой механической характеристике с увеличением скольжения.
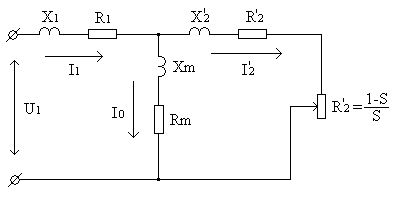
Рассмотрим далее изменение потерь в меди обмотки статора DР1. Из курса электрических машин известно, что ток статора I1 определяется геометрической суммой тока холостого хода I0 и приведенного значения тока ротора (рис. 1)
 (6)
(6)
Из этого выражения следует, что в зависимости от соотношения токов  и I2 между собой, ток I1 может возрастать или уменьшаться, соответ
и I2 между собой, ток I1 может возрастать или уменьшаться, соответ
| Ф |
| Рис. 1. Схема замещения и векторная диаграмма асинхронного двигателя |
| I¢2 |
| . |
| I0 |
| . |
| I1 |
| . |
| U1 |
| . |
| I1 r1 |
| . |
| jI1 x1 |
| . |
| E1 – E2 |
| . . |
| j1 |
| j¢ |
ственно будут возрастать или уменьшаться потери DР1 при изменении U1.
Так как в режиме холостого хода двигателя ток в обмотке статора  равен току холостого хода
равен току холостого хода  , то при изменении питающего напряжения сети можно проследить изменение электрических потерь в обмотке статора:
, то при изменении питающего напряжения сети можно проследить изменение электрических потерь в обмотке статора:
 (7)
(7)
Для определения I1 опытным путем снимается характеристика холостого хода двигателя. По опыту х.х. и каталожным данным двигателя расчетным путем определяются следующие его параметры. По данным опыта х.х. определяются значения коэффициентов мощности для разных значений напряжения U1 по формуле:
 (8)
(8)
где Р0 и I0 – значения мощности и тока х.х. для разных значений U1 (табл. 1).
По тригонометрическим таблицам находятся sinj0 для тех же значений U1.Затем определяется приведенное значение тока ротора
где  – коэффициент загрузки;
– коэффициент загрузки;  – кратность максимального момента; для практических целей можно принять
– кратность максимального момента; для практических целей можно принять
Кm » 2,;  – кратность напряжения на зажимах двигателя (в расчетах принимается U1 в пределах от 1,15 Uн до 0,8Uн).
– кратность напряжения на зажимах двигателя (в расчетах принимается U1 в пределах от 1,15 Uн до 0,8Uн).
По найденным значениям  определяют
определяют  , и угол
, и угол  для всех коэффициентов загрузки заданного интервала изменений. Принятый интервал изменений Кз = (0,5-1,0). Для указанных Кз и Кн определяется значение тока статора из выражения
для всех коэффициентов загрузки заданного интервала изменений. Принятый интервал изменений Кз = (0,5-1,0). Для указанных Кз и Кн определяется значение тока статора из выражения
 (9)
(9)
Из этих же условий определяется номинальное значение приведенного тока ротора  по формуле
по формуле
 (10)
(10)
где I1н – номинальный ток статора исследуемого двигателя при Uн;  – номинальный коэффициент мощности асинхронного двигателя при Uн и I1н (I1н и – каталожные данные).
– номинальный коэффициент мощности асинхронного двигателя при Uн и I1н (I1н и – каталожные данные).
Находится значение приведенного тока ротора 
 (11)
(11)
Величина приведенного активного сопротивления обмотки ротора  определяется по формуле
определяется по формуле
 (12)
(12)
где  – коэффициент, учитывающий соотношение сопротивлений цепи статора под нагрузкой и при холостом ходе; Iк– ток короткого замыкания двигателя; DРмех = 0,01Рн;
– коэффициент, учитывающий соотношение сопротивлений цепи статора под нагрузкой и при холостом ходе; Iк– ток короткого замыкания двигателя; DРмех = 0,01Рн;  – номинальное скольжение двигателя;
– номинальное скольжение двигателя;  – синхронная скорость вращения асинхронного двигателя;
– синхронная скорость вращения асинхронного двигателя;  – номинальная скорость двигателя.
– номинальная скорость двигателя.
По найденным значениям  определяются потери в меди ротора DР2 по формуле (5) и потери в меди статора DР1 по формуле
определяются потери в меди ротора DР2 по формуле (5) и потери в меди статора DР1 по формуле
 (13)
(13)
По данным опыта х.х. определяются потери в статорной обмотке при холостом ходе
 (14)
(14)
Потери в стали находятся из выражения
DРст = Р0 – (DР10 + DРmax + DРдоп), (15)
где DРдоп = 0,005 Рн.
Потери механические и дополнительные принимаются неизменными и равными
DРмех + DРдоп = 0,015Рн. (16)
Опытно-расчетный метод позволяет определить отдельные составляющие и суммарные потери мощности в асинхронном двигателе при различных значениях U1 и коэффициентах загрузки.
Дата добавления: 2020-10-14; просмотров: 801;
Поиск по сайту
Узнать еще
- II. Отклонения расположения поверхностей
- II. Психологические приемы влияния на партнера.
- II. Темы рефератов, ориентированные на исследование и анализ методологических идей и концепций крупнейших представителей современной философии и естествознания.
- III. Исследование личностных особенностей подростков
- III. ПРИЕМ НА РАБОТУ
- Im7im9im11Исследование памяти
- PEST-анализ состоит в выявлении и оценке влияния факторов макросреды на результаты текущей и будущей деятельности предприятия.
- VI. 1. ПЕРВИЧНОЕ ВЫЯВЛЕНИЕ ДЕТЕЙ С ОТКЛОНЕНИЯМИ В РАЗВИТИИ С ИСПОЛЬЗОВАНИЕМ ПЕДАГОГИЧЕСКОГО НАБЛЮДЕНИЯ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
