И построение траекторий точек звеньев
Основные задачи кинематического исследования плоских механизмов
В разделе кинематики изучается движение отдельных звеньев машин без учета действующих на них сил. Любое движение звена характеризуется перемещением его в пространстве, скоростью и ускорением движения его точек. Отсюда вытекают основные задачи кинематического исследования механизмов:
1. Построение кинематических схем и последовательного ряда положений механизма.
2. Построение траекторий точек механизма.
3. Определение скоростей и ускорений любой точки механизма.
4. Определение угловых скоростей и угловых ускорений звеньев механизма.
Существует несколько методов кинематического исследования механизмов:
1) г р а ф и ч е с к и й и г р а ф о а н а л и т и ч е с к и й – эти методы характеризуются большой наглядностью и обычно дают возможность решить все основные задачи кинематического исследования с достаточной точностью;
2) а н а л и т и ч е с к и й м е т о д – совершенно необходим в случаях, когда графоаналитическим методом нельзя получить требуемую точность решения (например, при малых перемещениях ведомых звеньев);
3) э к с п е р и м е н т а л ь н ы й м е т о д – осуществляется в производственных условиях для исследования сложных механизмов, механизмов со звеньями криволинейной формы.
Определение положений звеньев механизма
и построение траекторий точек звеньев
Для определения положений звеньев механизма строят его кинематическую схему в заранее выбранном масштабе. Под масштабом подразумевается отношение действительной величины, выраженной в соответствующих единицах, к длине отрезка, изображающего эту величину, выраженную в миллиметрах. При построении кинематических схем и планов положений механизмов (рис. 2.1) определяется масштаб длин, показывающий число метров натуральной величины, соответствующей одному миллиметру чертежа, м/мм:
 , (2.1)
, (2.1)
где  - действительная длина кривошипа, м;
- действительная длина кривошипа, м;
О1А – длина отрезка, изображающего кривошип на чертеже, мм.
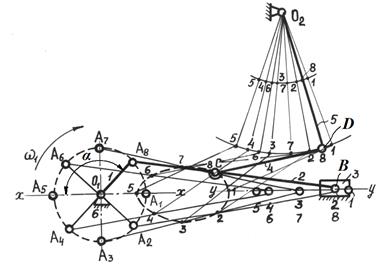
Рис. 2.1
При построении планов скоростей и ускорений на чертеже приходится откладывать значения скорости и ускорения в некотором масштабе. Например, если вектор вычисленной скорости точки  , м/с, на плане скоростей изображен в виде отрезка
, м/с, на плане скоростей изображен в виде отрезка  произвольной длины, мм, то, поделив значение скорости
произвольной длины, мм, то, поделив значение скорости  на длину этого отрезка, найдем масштаб плана скоростей, м/с·мм -1:
на длину этого отрезка, найдем масштаб плана скоростей, м/с·мм -1:
 . (2.2)
. (2.2)
Аналогично найдем масштаб плана ускорений, м/с·мм -1:
 , (2.3)
, (2.3)
где  - вычисленная величина ускорения точки А, м/с2;
- вычисленная величина ускорения точки А, м/с2;
 - масштабное значение ускорения точки А, мм.
- масштабное значение ускорения точки А, мм.
Истинные значения скорости и ускорения любой точки механизма получают из их масштабных значений путем умножения последних на соответствующий масштаб.
2.2.1. Построение планов положений механизмов
Планом положения механизма называется чертеж, изображающий расположение его звеньев в какой-то определенный момент движения. Отсюда следует, что план положения представляет собой кинематическую схему механизма, вычерченную для заданного положения механизма.
Планы положений механизмов, включающих в себя двухповодковые группы, строятся методом засечек.
Рассмотрим это на примере.
Пример 1: построить положения механизма (см. рис. 2.1) для заданного угла поворота α ведущего звена при  = 0,200 м;
= 0,200 м;  = 0,860 м;
= 0,860 м;  = 0,360 м;
= 0,360 м;
 = 0,460 м;
= 0,460 м;  = 0,600 м; α = 135°.
= 0,600 м; α = 135°.
Для построения плана принимаем, что длину кривошипа на схеме будет изображать отрезок О1А8, длина которого равна 25 мм. Тогда масштаб плана находим по формуле (2.1)  Затем вычисляем длины других отрезков, изображающих звенья механизма, которые будем откладывать на чертеже, мм:
Затем вычисляем длины других отрезков, изображающих звенья механизма, которые будем откладывать на чертеже, мм:
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  .
.
Построение плана начинаем с нанесения элементов неподвижного звена (точек опор О1 и О2 и линии хода ползуна у - у ). Под углом α = 135° к х - х из точки О1 проводим ось ведущего звена и от точки О1 откладываем на ней отрезок О1А8, равный длине кривошипа (  мм).
мм).
Затем определяем положение точки В. Для этого из точки А8 радиусом А8В делаем засечку на линии хода ползуна у – у. На звене А8В находим положение точки С. Для того, чтобы найти положение точки D, проводим дуги: из точки С – радиусом СD, из точки О2 – радиусом О2D. Точка их пересечения будет точкой D.
2.2.2. Построение траекторий точек
Задача сводится к тому, чтобы по данному положению механизма найти ряд других его последовательных положений (см. рис. 2.1).
Траектории движущихся точек наряду со скоростями и ускорениями представляют собой важную кинематическую характеристику.
Бывают случаи, когда траектории движения в механизме играют самостоятельную первостепенную роль и своим видом определяют назначение механизма, например, эллипсограф, прямолинейно-направляющие механизмы и др.
Траектории строят методом засечек и методом шаблонов.
Метод засечек. В ТММ условно звенья рассматриваются как материальные твердые тела, то есть связь между отдельными точками звена сохраняется неизменной во время его движения.
Пример 2: задан плоский кривошипно-шатунный механизм (см. рис. 2.1) с ведущим звеном О1А8 (кривошипом), траекторией центра шарнира А8 которого является окружность радиуса О1А8.
Разделив траекторию точки А8 на несколько равных частей (в примере на 8 частей: А1, А2, …, А8), раствором циркуля, равным длине звена А8В (она постоянна во время работы механизма), выполняем засечки из точек А1, А2, …, А8 на линии движения ползуна В (звено 3) вдоль оси у - у. При этом получаем положения точки В – В1, В2, …, В8. Далее следует определить траекторию точки С, которая делит шатун на две части – АС и СВ. Соединив тонкими линиями точки А с соответствующими им точками В, получим положения шатуна: А1В1, А2В2, …, А8В8. Проведя циркулем дуги АС и ВС из соответствующих точек А (А1, А2, …, А8) или В (В1, В2, …, В8) на положениях шатуна, отмечаем точки С1, С2, …, С8, соединив которые, получаем траекторию точки С.
Затем определяется траектория точки D. Эта точка общая у двух звеньев СD и О2D. Находясь на звене О2D, точка D описывает дугу радиуса О2D. Из соответствующих положений точки С (С1, С2, …, С8) циркулем делаем засечки радиуса СD и в местах пересечения с дугой радиуса О2D отмечаем точки D – D1, D2, …, D8.
Дата добавления: 2020-10-01; просмотров: 433;
Поиск по сайту
Узнать еще
- F. Построение диаграмм сумм рангов
- І. Построение дисперсионного комплекса.
- А. Построение эпюр М и Q
- А. Построение эпюр М и Q
- Аксиоматическое построение теории вероятностей
- Аналог относительного ускорения точек звена
- Аппроксимация модели объекта в виде n последовательных звеньев
- Биомеханический резонанс активных звеньев человека

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
