МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ОБЪЕКТА УПРАВЛЕНИЯ.
Математической моделью динамической системы принято называть совокупность аналитических выражений и алгоритмов, однозначно определяющих развитие процессов в системе, т. е. ее движение. В зависимости от типа сигналов различаются непрерывные и дискретные модели систем. В зависимости от используемых операторов - линейные и нелинейные, временные и частотные модели. К временным относятся модели, в которых аргументом является время (непрерывное или дискретное). Это дифференциальные и разностные уравнения, записанные в явном виде или в операторной форме. Частотные модели предусматривают использование операторов, аргументом которых является частота соответствующего сигнала.
Аналитические модели вход-выход (ВВ) - это описание связи входных и выходных сигналов динамической системы, которое применяется как для отдельных блоков, так и всей системы управления в целом. Для обозначения входных и выходных сигналов воспользуемся обозначениями, характерными для объекта управления, где входным сигналом является управляющее воздействие u(t), а выходным регулируемая переменная y(t). В этом разделе рассматриваются непрерывные временные модели, описывающие связи входных и выходных переменных динамической системы с помощью обыкновенных дифференциальных уравнений соответствующего порядка.
Система линейных уравнений объекта. В общем случае модель одноканального объекта управления описывается нелинейным дифференциальным уравнением (системой уравнений), связывающим входной сигнал управления u(t) и выходной сигнал состояния объекта y(t):
F(y', y", …, y(n), u', u", …, u(m)) = 0. (3.2.1)
Уравнение описывает динамическое состояние ОУ на некотором временном интервале t≥to, и связывает входные сигналы u(t) и их производные u(n)(t) с выходными сигналами y(t) и их производными y(n)(t). Значения у(to) = уо, у'(to) = у'о, ... , y(n)(to) = у(n)о называются начальными значениями (условиями), а число г = n-m ≥ 1- относительной степенью модели.
Классом дифференциальных уравнений, удобным для проведения исследований, являются линейные дифференциальные уравнения. Переход к линейным дифференциальным уравнениям выполняется операцией линеаризации, при которой переменные уравнения (3.2.1) заменяются новыми переменными – отклонениями от некоторого номинального режима (y=y-yн, u= u-uн), начало координат переносится в точку номинального режима, а функция F раскладывается в ряд Тейлора в окрестностях этой точки по частным производным. В результате линеаризации получаем следующую систему линейных уравнений в отклонениях:
A0(t)y(n) + A1(t)y(n-1) +…+ An(t)y = B0(t)u(m) + В1(t)y(m-1) +…+ Bm(t)u. (3.2.2)
Порядок системы уравнений равен n по порядку производной y(n)(t), n ≥ m, так как при n < m системы технически нереализуемы. Так как все частные производные представляют собой либо постоянные матрицы, либо матрицы, зависящие только от времени, то полученное уравнение есть либо система линейных дифференциальных уравнений с постоянными коэффициентами (Aj(t) = aj = const, Bj(t) = bj = const), либо система с переменными коэффициентами, в зависимости от номинальной траектории.
В случае постоянных коэффициентов система называется стационарной. Как правило, входные и выходные величины объекта - скалярные функции, при этом уравнение (3.2.2) принимает вид:
a0y(n) + a1y(n-1) +…+ any = b0u(m) + b1y(m-1) +…+ bmu. (3.2.3)
где aj, bj – постоянные коэффициенты (параметры) модели, a0 > 0, b0 > 0, n - порядок модели, 0 ≤ m < n. Решение уравнений таких стационарных объектов относительно y(t) является главным объектом исследований в классической теории автоматического управления.
Система, для которой u(t)≡ 0, называется автономной. Описание автономной системы дается однородным дифференциальным уравнением вида
a0y(n) + a1y(n-1) +…+ any = 0. (3.2.3')
Передаточная функция системы. Основной метод исследования линейных систем с постоянными коэффициентами - преобразование Лапласа. При нулевых начальных условиях, после преобразования Лапласа уравнения вида (3.2.3), получаем:
L[a0y(n) + a1y(n-1) +…+ any] = L[b0u(m) + b1y(m-1) +…+ bmu].
(a0p(n) + a1p(n-1) +…+ an)Y(p) = (b0p(m) + b1p(m-1) +…+ bm)U(p). (3.2.4)
Y(p) = L[y(t)] =  exp(-pt) y(t) dt,
exp(-pt) y(t) dt,
U(p) = L[u(t)] = exp(-pt) u(t) dt.
Для линейного уравнения преобразование Лапласа отношения выходного сигнала Y(p) к входному сигналу U(p) при нулевых начальных условиях не зависит от самих сигналов и называется передаточной функцией системы W(p).
Y(p) = U(p) (b0p(m) + b1p(m-1) +…+ bm) /(a0p(n) + a1p(n-1) +…+ an),
W(p) = (b0p(m) + b1p(m-1) +…+ bm) /(a0p(n) + a1p(n-1) +…+ an), (3.2.5)
Y(p) = W(p) U(p).
Передаточная функция W(p) зависит только от самих дифференциальных уравнений и обладает свойством линейности:
Если Y(p) = Y1(p) + Y2(p), то U(p) = W(p)Y1(p) + W(p)Y2(p) = U1(p)+U2(p).
Если Y(p) = сY(p), то U(p) = W(p) Y(p) = с W(p) Y(p).
В общем случае замкнутая система регулирования с обратной связью рассматривается в структурной форме, приведенной на рис. 3.2.1, где используются следующие обозначения сигналов:
Y(p) = W(p)e(p); W(p) = W1(p)W2(p);
Yос(p) = Wос(p)Y(p); e(p)=U(p)-Yoc(p).
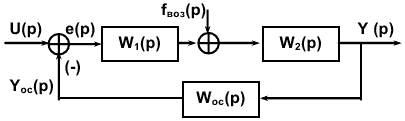
Рис. 3.2.1.
Выражение выходного сигнала состояния системы через входной сигнал управления:
Y(p)=W(p)(U(p)-Wос(p)Y(p);
Y(p)(1± W(p)Wос(p))=W(p)U(p).
Отсюда главная передаточная функция замкнутой системы:
Wзс(p) = Y(p)/U(p) = W(p)/[1 ± W(p) Woc(p)].
Знак плюс или минус определяется типом обратной связи (отрицательная или положительная). Соответственно, выходной сигнал с учетом сигнала дестабилизирующего воздействия f(t), который суммируется с правой частью выражения (3.2.3):
Y(p)=Wзс(p)U(p) + Wf(p)f(p),
где Wf(p) – передаточная функция по возмущению. В замкнутой системе передаточная функция по возмущению определяется как отношение выходной величины, преобразованной по Лапласу, к функции возмущающего воздействия, преобразованной по Лапласу при нулевых начальных условиях. Возмущающее воздействие может быть приложено к любой точке системы.
Wf(p) = Y(p)/f(p) = W2(p)/[1+Woc(p)W(p)].
Передаточная функция по ошибке:
We(p) = e(p)/U(p) = 1/[1 + W(p) Woc(p)].
Передаточная функция по ошибке - основное средство исследования точности САУ. C учетом возмущающего воздействия:
e(p)=We(p)U(p) + Wef(p)f(p),
где Wef(p) - передаточная функция по ошибке и возмущению (от возмущения к ошибке):
Wef(p) = e(p)/f(p) = -W2(p)Woc(p)/[1 + W(p) Woc(p)].
Передаточная функция по обратной связи:
WYoc(p) = Yoc(p)/U(p) = W(p) Woc(p)/[1 + W(p) Woc(p)].
Типовые звенья САУ. Полиномы числителя и знаменателя передаточной функции (3.2.5) можно разложить на простейшие множители по их корням:
W(p) = N(p)/P(p) = m [(p-p1ч)…(p-pmч)] / [(p-p1з)…(p-pnз)], (3.2.6)
где μ = b0 /a0 – константа, piч – множество корней числителя N(p)=0, piз – множество корней знаменателя P(p)=0. Корни числителя передаточной функции называют нулями, корни знаменателя – полюсами. Комплексно сопряженные корни объединяются в квадратурные полиномы с вещественными коэффициентами: (p-α+jβ)(p-α-jβ) = p2-2αp+β2+α2.
После такого представления в числителе и знаменателе будет некоторое количество скобок первого и второго порядка с вещественными числовыми коэффициентами, каждую из которых можно рассматривать, как элементарную передаточную функцию, практически реализуемую в силу вещественности коэффициентов. Если вынести из всех скобок свободные члены и объединить их произведение в общий множитель К, то получим уравнение:
W(p) = K [W1(p)…Wz(p)], (3.2.7)
где z=n+m, если все корни вещественные, z < n+m, если есть комплексные корни. Коэффициент К принято называть коэффициентом усиления системы. Заметим, что W(0) = К = bm/an, т.е. его числовое значение равно коэффициенту усиления на нулевой частоте ("постоянном токе").
Классификация звеньев производится по виду их передаточных функций, независимо от исполнения (механические, гидравлические, электрические и пр.). Передаточные функции типовых звеньев, из которых синтезируются системы, обычно имеют числитель или знаменатель, равный единице. Ниже приводятся выражения передаточных функций основных типовых звеньев систем:
1. К - Усилительное звено.
2. p - Дифференцирующее звено.
3. 1/p - Интегрирующее звено (интегратор).
4. K/(Tp+1) - Инерционное (апериодическое) звено.
5. K/(T2p+2dTp+1) - Колебательное звено.
6. K(Tp+1) - Форсирующее звено.
7. K(T2p+2dTp+1) - Форсирующее звено 2-го порядка.
Здесь Т – определенный временной коэффициент (постоянная времени). Звенья 2, 6 и 7 не реализуются в строгом теоретическом смысле, существуют только их приближения.
Типовые входные воздействия. Для оценки динамических свойств системы и отдельных звеньев принято исследовать их реакцию на типовые входные воздействия. Наиболее распространенными типовыми воздействиями являются ступенчатое, импульсное и гармоническое. Любой сигнал u(t), имеющий сложную форму, можно разложить на сумму типовых воздействий ui(t) и на основании принципа суперпозиции получить результирующее изменение выходной величины y(t) в виде суммы реакций системы на каждую из составляющих.
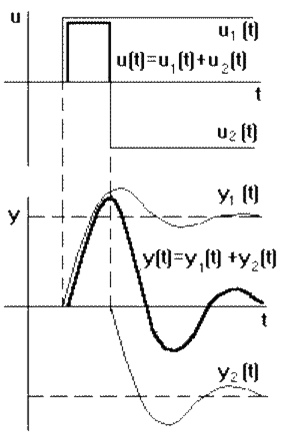
Рис. 3.2.1.
Единичная ступенька.Особое значение в теории автоматического управления имеет ступенчатое воздействие 1(t) = 1 при t≥0, 1(t) = 0 при t<0 (сигнал u1(t) на рис. 3.2.1). Все остальные воздействия могут быть сведены к нему. Так, например, импульсный сигнал может быть представлен двумя ступенчатыми сигналами одинаковой величины противоположными по знаку, поданными один за другим через интервал времени Dt(сигнал u(t) на рис. 3.2.1).
Преобразование Лапласа для единичной ступеньки:
1(p) = exp(-pt) dt = 1/p. (3.2.8)
Линейно нарастающее воздействие (t(t)=t при t≥0, t(t) = 0 при t<0) представляет собой интеграл по времени от единичной ступеньки:
t(t) =  1(t) dt, 1(t) = d t(t) /dt.
1(t) dt, 1(t) = d t(t) /dt.
Преобразование Лапласа:
t(p) = t exp(-pt) dt = 1/p2. (3.2.9)
Экспоненциальная функция exp(at). Преобразование Лапласа:
L[exp(at)] = exp(at) exp(-pt) dt = 1/(p-a). (3.2.10)
Выражение справедливо и при любом комплексном α.
Гармонические воздействия sin ωt и соs ωt.
На основе формулы Эйлера exp(jωt) = cos ωt + j sin ωt соответственно имеем cos ωt = Re exp(jωt), sin wt = Im exp(jwt). Преобразования Лапласа:
L[sin ωt] = L[Im ejωt] = Im L[ejωt] = Im (1/(p-jω)) = Im((p+jω)/(p2+ω2)) =
= Im(p/(p2+ω2)+jω/(p2+ω2)) = ω/(p2+ω2).
L[cos ωt] = Re L(ejωt) = Re (1/(p-jω)) = Re((p+jω)/(p2+ω2)) = p/(p2+ω2).
Дельта - функция δ(t) - математическая модель очень короткого конечного воздействия большой мощности (единичный импульс). Определение δ(t)-функции даётся через интеграл свёртки с любой другой интегрируемой функцией x(t):
 d(t-t0) x(t) dt = x(t0).
d(t-t0) x(t) dt = x(t0).
Отсюда, при x(t)=1:
d(t) dt = 1, d(t) exp(-pt) dt = 1, L[d(t)] = 1. (3.2.11)
Единичный импульс физически представляет собой очень узкий импульс, ширина которого стремится к нулю, а высота - к бесконечности, ограничивающий единичную площадь. Дельта - функция связана с единичной ступенчатой и линейно-нарастающей функцией выражением:
d(t) = d1(t) /dt = d2 t(t) /dt2.
| <== предыдущая лекция | | | следующая лекция ==> |
| | | Анализ поглотителей времени |
Дата добавления: 2020-05-20; просмотров: 188;
Поиск по сайту
Узнать еще
- IV. Структурно-иерархическая модель личности Реймонда Кеттела
- Аварии на объектах обустройства
- Аварии на пожаро- и взрывоопасных объектах
- Аварии на химически опасных объектах
- АВТОРИТАРНАЯ МОДЕЛЬ
- АДАПТИВНАЯ ИНТЕРПРЕТАЦИОННАЯ МОДЕЛЬ ННМ
- Адаптивное управление с авторегрессивной моделью
- Актуальность и значимость создания доступного объекта социальной инфраструктуры.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
