Дистанционные гиромагнитные компасы
Гироскопические дистанционные компасы в последнее время получают все большее распространение.
Принципиальная схема одного из дистанционных гиромагнитных компасов дана на фиг. 146.
Дистанционный гиромагнитный компас ДГМК представляет собой гирополукомпас, показания которого корректируются магнитным компасом типа ПДК.
В комплект прибора входит:
а) гирополукомпас;
б) магнитный датчик типа ПДК;
в) усилитель;
г) два указателя;
д) соединительная коробка;
е) кнопка согласования;
ж) преобразователь.
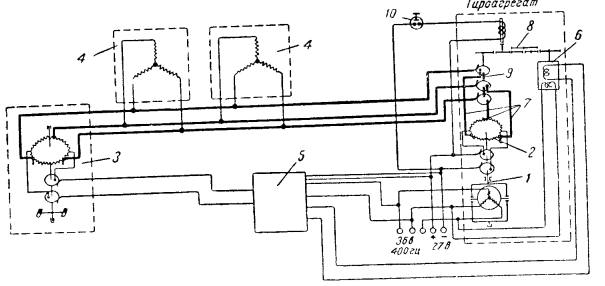
Фиг 146. Принципиальная схема дистанционного гиромагнитного компаса ДГМК-3: 1- внешняя рамка свободного гироскопа; 2 - кольцевой потенциометр; 3 - магнитный датчик ПДК-45; 4 - указатели; 5 - усилитель, 6 - электродвигатель; 7 - щетки, 8 - редуктор; 9 - контактные кольца, 10 - кнопка согласования
На оси внешней рамки свободного гироскопа 1 закреплен кольцевой потенциометр 2 типа ПДК, к двум диаметрально расположенным точкам которого подводится постоянное напряжение 27 в. По потенциометру скользят три щетки, расположенные под углом 120°. Положение щеток относительно токоподводов определяет величину потенциала каждой щетки. Щетки через контактные кольца 9 и токосъемные пружины связаны одновременно с потенциометром магнитного датчика 3 и двумя указателями 4.
Если углы между щетками и токоподводами гироагрегата и соответственно щетками и токоподводами магнитного датчика отличаются на 90°, то разность потенциалов на токоподводах датчика равна нулю. Если же разность между этими углами не равна 90°, то на токоподводах датчика возникает разность потенциалов, которая подается на вход усилителя 5. Снимаемое со вторичной обмотки выходного трансформатора усилителя напряжение подается на управляющую обмотку электродвигателя 6 гироагрегата, который поворачивает щетки потенциометра гироагрегата в сторону уменьшения угла рассогласования.
Таким образом, показания указателя зависят от положения щеток относительно токоподводов потенциометра магнитного датчика.
При этом указатели показывают компасный курс с погрешностью не более ±2°.
Рассогласование между положением щеток потенциометра гироагрегата и магнита датчика может быть вызвано двумя причинами:
а) Прецессией гироскопа в азимуте.
Так как гироскоп в азимуте не корректируется, то он может прецессировать под действием сил трения и всегда имеющейся некоторой несбалансированности внутренней рамки. Эта прецессия гироскопа компенсируется соответствующим движением щеток потенциометра гироагрегата. Так как скорость прецессии гироскопа при всех условиях не превышает 1 град/мин, а скорость отработки щеток выбрана приблизительно равной 3 град/мин, то прецессия гироскопа в азимуте не может вызвать рассогласования системы. Кроме того, указанная скорость отработки щеток обеспечивает независимые от колебаний магнитной системы датчика ПДК показания указателями осредненного компасного курса.
б) Увлечением картушки магнитного датчика.
Динамические погрешности магнитного датчика ПДК, возникающие при перегрузках самолета, увлекают картушку магнитного датчика, вызывая рассогласование системы. При этом электродвигатель 6 гироагрегата поворачивает щетки потенциометра в сторону уменьшения рассогласования, и в показаниях указателя появляется ошибка. Но так как возникающие перегрузки, в частности при виражах, обычно бывают кратковременными и гироскоп за это время практически сохраняет свое положение в пространстве неизменным, а скорость отработки щеток невелика (3 град/мин), то ошибка за каждую минуту виража в среднем не превышает 2,5°.
Большие погрешности, свойственные магнитным компасам, и необходимость точного определения курса самолета, возникающая при решении ряда задач, заставляют искать новые решения определения курса самолета. Одним из таких решений является создание приборов, основанных на непосредственном измерении магнитного поля Земли, т. е. создание индукционных компасов.
Дистанционные индукционные компасы
Дистанционный индукционный компас состоит из:
1) индукционного датчика;
2) нескольких указателей (в том числе один главный);
3) усилителя;
4) инвертора;
5) арретира.
Главной частью прибора является индукционный датчик, который помещают в крыле самолета или в хвостовой части фюзеляжа для изоляции от возмущающего влияния ферромагнитных масс и электрических токов.
Чувствительный элемент датчика состоит из трех пар стержней (фиг. 147), изготовленных из материала с высокой магнитной проницаемостью (пермаллой). Каждая пара стержней несет на себе две обмотки, одна из которых служит для магнитного возбуждения стержней, а другая — для обнаружения изменения направления стержней относительно магнитного поля Земли.
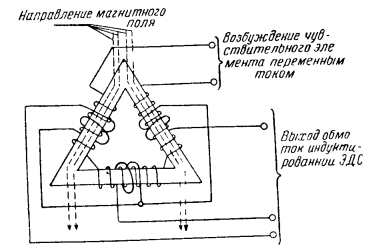
Фиг. 147. Схема чувствительного элемента индукционного датчика
Обмотки возбуждения соединены последовательно и питаются переменным током частотой 500 гц.
Переменные магнитные потоки, создаваемые этими токами в стержнях каждой пары, имеют взаимно противоположные направления. Поэтому во вторичных обмотках они не индуктируют ЭДС, а только вызывают изменение магнитной проницаемости стержней.
Благодаря периодическому изменению магнитной проницаемости горизонтальная составляющая магнитного поля Земли создает в стержнях пульсирующие магнитные потоки, что приводит к появлению во вторичной обмотке электродвижущих сил, величина которых зависит от расположения стержней относительно магнитного меридиана.
Наибольшей величины ЭДС достигает в обмотке стержня, расположенного параллельно линиям поля (север — юг). В обмотках перпендикулярных полю (восток — запад) ЭДС не возникает, так как их витки не пересекаются магнитным полем.
Каждому курсу самолета соответствует определенное соотношение ЭДС трех обмоток. Это обстоятельство и используется для измерения курса самолета.
Чувствительный элемент датчика смонтирован на гироскопе с тремя степенями свободы. Собственная ось гироскопа расположена в вертикальной плоскости.
Гироскоп обеспечивает горизонтальность положения чувствительного элемента и вместе с тем при изменении курса самолета не мешает ему поворачиваться вместе с самолетом вокруг вертикальной оси.
Схема отработки курса таким компасом показана на фиг. 148.
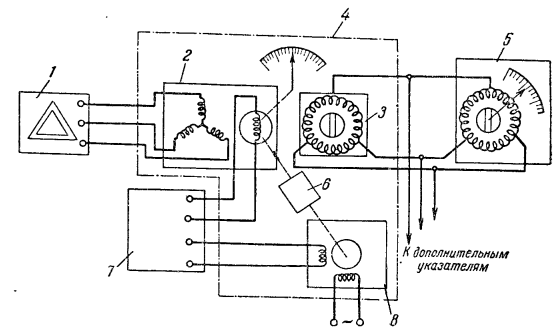
Фиг. 148. Электрическая схема дистанционного индукционного компаса: 1 - датчик; 2 - сельсин; 3 - магнесин; 4 - главный указатель; 5 - дополнительный указатель; 6 - редуктор; 7 - усилитель; 8 - асинхронный электродвигатель
В главном указателе 4 имеется сельсин 2, принимающий сигналы ЭДС чувствительного элемента.
Вторичная обмотка индукционного датчика питает статорную обмотку сельсина 2. В обмотке ротора сельсина при этом наводится ЭДС равнодействующим магнитным потоком всех трех обмоток статора. Следовательно, результирующая ЭДС роторной обмотки будет иметь разное угловое направление в зависимости от соотношения ЭДС обмоток датчика (т. е. в зависимости от курса).
Так как ЭДС ротора сельсина невелика, то она усиливается в электронном усилителе 7, и затем усиленные сигналы подаются на одну из обмоток двухфазного асинхронного двигателя 8 механизма отработки курса.
Вторая обмотка двигателя питается переменным током такой же частоты, получаемым непосредственно от инвертора. Фаза тока, питающего вторую обмотку, неизменна.
Электродвигатель 8 через редуктор 6 вращает стрелку главного указателя 4 и ротор сельсина 2. Когда ротор сельсина повернется так, что его обмотка будет перпендикулярна результирующему магнитному потоку статора, ЭДС в сельсине исчезнет, электродвигатель 8 остановится и стрелка прибора укажет курс самолета.
Всякое изменение курса сопровождается изменением направления магнитного потока; при этом электродвигатель вновь будет возбужден и установит ротор и стрелку прибора в новое положение, соответствующее новому курсу.
Механизм отработки курса одновременно с вращением ротора сельсина 2 вращает ротор магнесина 8, предназначенного для передачи показаний дополнительным указателям 5.
Дополнительные указатели имеют принимающий магнесин со стрелкой на роторе.
Так как датчик компаса не имеет подвижных чувствительных элементов, вызывающих инерционные погрешности, и удален от ферромагнитных масс, создающих девиации, то он дает показания с большой степенью точности; это привело к широкому его применению на средних и тяжелых самолетах.
Большим преимуществом индукционного компаса с чувствительным элементом, стабилизированным в плоскости горизонта, является отсутствие карданной ошибки.
При конструировании индукционного дистанционного компаса следует помнить, что применяемая в нем весьма точная гироскопическая вертикаль должна быть установлена в центре тяжести самолета (для обеспечения достаточной точности показаний), а магнитный индукционный датчик — в месте, где компасные девиации малы. Практически в центре тяжести самолета магнитные девиации не будут наименьшими.
Недостатком, ограничивающим применение дистанционного индукционного компаса, является его сложность и громоздкость.
Дата добавления: 2024-12-16; просмотров: 552;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
