Диапазон 862 - 870 МГц
Диапазон 868 - 870 МГц не является диапазоном ISM, хотя он и разрешен CEPT для неспецифических устройств SRD. Прилежащие к этому диапазону частоты используются в беспроводной и сотовой телефонии, которые чувствительны к помехам. Ситуация в этом диапазоне сложна и прорабатываются различные предложения по дополнительному выделению для устройств SRD частот в области 862 - 868 МГц. Мы рассмотрим и текущее, и перспективное положение в этом диапазоне.
В настоящее время диапазон 868 - 870 МГц разбит на пять поддиапазонов: 868 - 868,6 МГц, 868,7 - 869,2 МГц, 869,3 - 869,4 МГц, 869,4 - 869,65 МГц и 869,7 - 870 МГц. Из всех поддиапазонов один - 869,4 - 869,65 МГц, допускает наибольший уровень мощности в 500 мВт ERP и, поэтому, наиболее приемлем для RFID. Полоса равна 250 кГц, а скважность не должна превышать 10%. Вне этого диапазона уровень ERP излучения должен быть не более 250 нВт.
Таблица 4.15. Ширина спектра и пределы излучаемой мощности на частоте 869,525 МГц согласно регламенту CEPT/ETSI в настоящее время.
|
Так как европейские нормы значительно ниже, чем в США, рассматривается предложение для неспецифических устройств SRD снизить требования в диапазоне 865 - 868 МГц. Предлагается, чтобы устройства RFID в этом диапазоне функционировали либо на фиксированных частотах, либо с дискретной перестройкой частоты на 15 каналах по 200 кГц. Для того чтобы предотвратить помехи в соседних диапазонах, предлагается снижение предела мощности на краях диапазона. Эти предложения представлены в табл. 4.16.
| Частота | Мощность (ERP) | ~ Мощность (EIRP) | Детектор |
| 865 - 865,6 МГц | 100мВт | 164 мВт | Квазипиковый |
| 865,6 - 867,6 МГц | 2Вт | 3,28 Вт | Квазипиковый |
| 867,6 - 868 МГц | 500 мВт | 820 мВт | Квазипиковый |
| 865 - 868 МГц^ | 250 нВт | 410 нВт | Квазипиковый |
Диапазон 915 МГц
В Регионе 2 частоты 902 - 928 МГц назначены в качестве диапазона ISM. Этого нет ни в Европе, ни в Японии. Однако Канада, Австралия, Новая Зеландия и большинство стран Латинской Америки разрешают работать или в этом, или в близких диапазонах. Диапазон 915 МГц широко используется большим числом устройств, включая сенсоры движения и беспроводные телефоны.
В США существует три направления использования этого диапазона. Первое направление ограничивается применением в сенсорах охранных устройств, второе - для работы радиоустройств с распределенным спектром SS в режимах прямой последовательности DS и скачкообразной перестройки частоты FH, и третье - для узкополосных применений. Мы рассмотрим только режим FH и узкополосное применение, хотя, как отмечалось в главе 3, используется и режим DS.
В диапазоне 915 МГц общие требования для систем с FH заданы FCC 15.24. Эти нормы применяются также в диапазонах 2,45 и 5,8 ГГц. Частоты каналов должны быть разнесены более чем на 25 кГц или на ширину полосы 20 дБ. Перескок частоты должен быть табличным, псевдослучайным, а использование каждой частоты должно быть в среднем одинаковым. Входная полоса приемника должна быть согласована с шириной спектра излучения и должна перестраиваться в соответствии с частотой передатчика. При отстройке на 100 кГц мощность должна быть на 20 дБ ниже мощности на основной частоте. Спектральные компоненты вне диапазона должны соответствовать FCC 15.209. В системах FH отсутствует необходимость перескока частоты во всем диапазоне в течение каждого сеанса излучения, однако, если сеанс продолжителен, перескоки должны быть. Для того чтобы определить и избежать появления других пользователей на частоте канала, возможен предварительный анализ занятости частоты, однако других специальных мер для избежания возникновения коллизий не требуется.
В диапазоне 902 - 928 МГц каналы могут занимать или до 250 кГц полосы 20 дБ, или от 250 до 500 кГц. Системы, которые используют полосу до 250 кГц, должны иметь, по крайней мере, 50 перескоков частоты и среднее время работы на канале 0,4 с в течение 20 с.
| Таблица 4.17. Ширина полосы и пределы мощности для систем FH в диапазоне частот 902-928 МГц согласно регламенту FCC.
|
Системы, имеющие, по крайней мере, 50 перескоков частоты, могут работать с пиковой мощностью на входе антенны до 1 Вт. Системы с числом перескоков от 25 до 50 могут работать с пиковой мощностью на входе антенны до 0,25 Вт. Если используются антенны с усилением более 6 дБи, соответственно должна быть снижена пиковая мощность на входе антенны. При этом мощность EIRP должна сохраняться.
Согласно FCC 15.249 в диапазоне 902 - 928 МГц также могут работать устройства без перескока частоты. Напряженность поля на основной частоте не должна превышать 50 В/м, а на гармониках - 500 мкВ/м на 3 м. Вне диапазона излучение не должно превышать 500 мкВ/м на 3 м.
| Таблица 4.18. Пределы мощности для узкополосного использования в диапазоне 902 - 928 МГц согласно регламенту FCC.
|
Диапазон 2,45 ГГц
Во всем мире этот диапазон принят в качестве диапазона ISM и поэтому широко используется большим числом устройств. Основными источниками помех здесь являются СВЧ устройства, другие типы ISM устройств, а также беспроводная связь.
В Европе для систем RFID, работающих в этом диапазоне, параметры оговариваются специально. В соответствии с СЕРТ 70-03 мощность неспецифических устройств SRD в диапазоне 2,4 - 2,4835 ГГц не может превышать 10 мВт EIRP, однако в дополнении 11 указано, что для применений RFID этот диапазон может использоваться с 2001 года. В настоящее время проект ETSI EN 300440-1 дает специальную маску для систем RFID, работающих в этом диапазоне. Так в диапазоне 2,446 - 2,454 ГГц мощность EIRP не должна превышать 27 дБм (« 500 мВт). С таким уровнем мощности аппаратура в режимах FH и CW может использоваться как внутри, так и вне помещений. В этом же диапазоне для систем с перескоком частоты внутри помещений предел мощности EIRP равен 36 дБм (« 4 Вт). Также определено, что при более высоком уровне мощности, ширина ДНА не должна превышать 90 ° в горизонтальной плоскости и иметь уровень боковых лепестков не более - 15 дБ. Перескок частоты должен иметь не менее 20 каналов со средним временем работы на канале не более 0,4 с.
| Таблица 4.19. Диапазоны и пределы мощности для систем с перескоком частоты в диапазоне 2,45 ГГц согласно регламенту CEPT/ETSI.
|
| ** Для систем FH или CW внутри и снаружи помещений. |
В США системы RFID в этом диапазоне могут работать как с перескоком частоты, так и без него. Общие требования к системам с перескоком частоты в этом диапазоне совпадают с требованиями в диапазоне 902 - 928 МГц. Однако ширина диапазона, число каналов и другие детали отличаются. В этом диапазоне системы могут работать по крайней мере на 75 каналах или, в особых случаях по крайней мере на 15 каналах. При работе на 75 каналах полоса на уровне 20 дБ не должна превышать 1 МГц, а среднее время работы на одной частоте не должно превышать 0,4 с за период 30 с. Если система использует по крайней мере 15 не перекрывающихся каналов с общим перекрытием 75 МГц, полоса на уровне 20 дБ может превышать 1 МГц. В этом режиме среднее время работы на одной частоте должно быть равным 0,4 с за время, которое занимает перестройка частоты во всем диапазоне. При работе на 75 каналах мощность на выходе антенны не должна превышать 1 Вт. При работе с большим, чем 75, числом каналов, она не должна превышать 0,125 Вт. Если усиление антенны превышает 6 дБи, мощность на выходе антенны должна уменьшаться на соответствующую величину. Требования к фиксированной связи «точка - точка» немного отличны.
| Частота | Число каналов | Ширина полосы (20 дБ) | Мощность (EIRP) | Детектор |
| 2,4 - 2,4835 ГГц | < 75 | 1 МГц | 4 Вт | Среднего значения |
| 2,4 - 2,4835 ГГц | < 15 | > 1 МГц (перекрытие 75 МГц) | 500 мВт | Среднего значения |
| 2,4 - 2,4835 ГГц ^ | 75 нВт | Среднего значения |
Согласно FCC 15.249 системы в этом диапазоне могут работать и без перестройки частоты. Основным ограничением является непревышение напряженности основного излучения 50 мВ/м на 3 м и непревышение напряженности поля на гармониках 500 мкВ/м на 3 м. Измерения должны проводиться с использованием детектора среднего значения при условии, что пиковая напряженность поля не должна превышать установленные пределы более чем на 20 дБ.
| Таблица 4.21. Диапазоны и пределы мощности для узкополосного использования в диапазоне 2,45 ГГц согласно регламенту FCC.
|
Стандарты для радиоэлектронных устройств (RCR STD), введенные Ассоциацией радиопромышленности и бизнеса ARIB, в документах RCR STD-1 и STD-29 устанавливают пределы для систем RFID диапазона 2,45 ГГц. STD-1 устанавливает пределы для автомобильных идентификационных систем, а STD-29 - для радиостанций малой мощности. STD-29 устанавливает пределы для узкополосных устройств с выходной мощностью антенны 10 мВт и усилением 20 дБи. Предполагается, что STD-29 установит нормы для систем с перестройкой частоты. Пределы могут быть эквивалентными существующим пределам для беспроводных систем локальной связи - мощность 10 мВт и усиление антенны 2,14 дБи.
Диапазон 5,78 ГГц.
Этот диапазон во всем мире принят в качестве диапазона ISM. В последнее время он загружен локальными беспроводными сетями, однако не так плотно, как диапазон 2,45 ГГц.
В Европе мощность EIRP неспецифических SRD не должна превышать 25 мВт. Специальных указаний по приложениям RFID в этом диапазоне нет. Паразитные излучения свыше 1 МГц должны быть менее 1 мкВт .
| Таблица 4.23. Диапазоны и пределы мощности для неспецифических SRD в диапазоне 5,78 ГГц согласно регламенту CEPT/ETSI.
|
В США, как и в диапазонах 915 и 2450 МГц, устройства могут работать с распределенным спектром или в обычном узкополосном режиме. В диапазоне 2450 МГц к устройствам с перестройкой частоты применяются такие же требования, как и в диапазоне 915 МГц. Системы с перестройкой частоты в этом диапазоне могут работать по крайней мере на 75 каналах; при этом полоса на уровне 20 дБ не должна превышать 1 МГц, а среднее время работы на одной частоте не должно превышать 0,4 с за период 30 с. Мощность на выходе антенны не должна превышать 1 Вт, а если усиление антенны превышает 6 дБи, мощность должна уменьшаться на величину превышения. Требования к фиксированной связи «точка - точка» в диапазонах 915 и 2450 МГц различны.
| Таблица 4.24. Диапазоны и пределы мощности для режима с перестройкой частоты в диапазоне 5,78 ГГц согласно регламенту CEPT/ETSI.
|
В обычном узкополосном режиме согласно требованиям FCC 15.249, напряженность основного электрического поля не должна превышать 50 мВ/м, а напряженность на гармониках - 500 мкВ/м на 3 м. Эти нормы проверяются при помощи детектора среднего значения, а при использовании пикового детектора указанные нормы не должны превышаться более чем на 20 дБ.
| Таблица 4.25. Диапазоны и пределы мощности для узкополосного режима в диапазоне 5,78 ГГц согласно регламенту FCC.
|
В Японии напряженность излучения в диапазоне 5,78 ГГц не должна превышать 35 мкВ/м на расстоянии 3 м.
Из рассмотрения возможных частотных диапазонов, предельных напряженностей поля и мощностей излучения в Европе, США и Японии можно сделать вывод, что для систем RFID наиболее подходят диапазоны < 135 кГц, 13,56 кГц и 2,45 ГГц. В Европе и США также приемлемы диапазоны 125 кГц и 900 МГц. Другие диапазоны могут использоваться только отдельными администрациями, например, диапазон 6,78 МГц удобен для использования в Европе, но не в США, и наоборот - диапазон 5,78 ГГц удобен для использования в США, но не в Европе.
При выборе диапазона частот должны учитываться не только доступность, предельная напряженность поля и мощность излучения, но и многие другие факторы. При этом необходимо учитывать не только распространение и поведение электромагнитных волн в окружающей среде, но и вопросы проектирования и производства, а также конкретные пользовательские требования к аппаратуре RFID.
5 О дальности действия систем RFID
Одним из основных параметров систем RFID является дальность действия. В индуктивных или емкостных системах, функционирующих в ближней зоне поля, дальность действия невысока - она достигает единиц - десятков сантиметров. Причиной тому является резкое спадание напряженности электрического (обратная кубическая зависимость) и магнитного (обратная квадратичная зависимость) полей с расстоянием в совокупности с необходимостью соблюдения строгих требований по электромагнитной совместимости (регламентов) и санитарных норм. При этом возможности увеличения дальности таких систем практически уже исчерпаны.
Дальность действия систем RFID, функционирующих в дальней зоне электромагнитного поля в зависимости от типа метки - чиповая или бесчиповая, пассивная или полуактивная - может составлять от единиц до десятков метров. По сравнению с системами ближней зоны дальность увеличивается за счет менее резкого (линейного) уменьшения напряженности электромагнитного поля.
Кроме положительного эффекта, увеличение дальности действия может приводить к нежелательным последствиям. Так, в частности, увеличение дальности действия приводит к расширению зоны считывания аппаратуры и может снижать ее быстродействие из-за необходимости разрешения коллизий сигналов от большого числа меток. Кроме того, могут появиться проблемы электромагнитной совместимости с другим радиоэлектронным оборудованием, например, с близко расположенными считывателями других систем RFID. Следовательно грамотный выбор параметров, влияющих на дальность действия, может повысить эффективность функционирования систем RFID в целом.
5.1. Энергетическое и модуляционное уравнения дальности
Рассмотрим зависимость дальности действия наиболее широко распространенного в мире типа аппаратуры - с совмещенной приемной и передающей антенной считывателя и пассивными чиповыми метками от характеристик и параметров этой аппаратуры. Дальность действия таких систем описывается двумя уравнениями.
RЕ = ( kE ·P ·GR ·Ae /4πS )½,
где Re - энергетическая дальность считывания метки,
P - мощность генератора считывателя,
GR - коэффициент усиления антенны считывателя,
Ae и S - эффективная площадь антенны и чувствительность метки соответственно,
kE - энергетический коэффициент.
В отличие от известного уравнения радиосвязи в формулу введен энергетический коэффициент kE. Этот коэффициент учитывает соотношение между мощностью сигнала, поступающей в нагрузку антенны (чип), и мощностью, которая по принципу действия технологии RFID отражается меткой и несет информацию об идентифицируемом объекте. Чувствительность S является мощностью на выходе антенны метки, которая гарантирует минимально необходимое энергопитание подсоединенного к антенне чипа.
Второе - «модуляционное» уравнение, описывает обратную линию (reverse line), т.е. прием считывателем отраженного от метки сигнала, модулированного кодами идентификационного номера или данных метки:
Rm = [P •GR2 • λ2 • ∆σ/ (4π)3 - Sr ]1/4 ,
где RM - модуляционная дальность считывания метки,
λ - длина электромагнитной волны сигнала,
∆σ = (σmax - σmin) - вариация ЭПР антенны метки,
SR - рабочая чувствительность приемника считывателя.
Параметры σmax и σmin являются максимальным и минимальным значениями ЭПР, которые обеспечиваются вариацией нагрузки (чипом) и модуляцией обратного рассеяния антенны метки. Специфика уравнения состоит в том, что в технологии RFID оперируют с вариацией ЭПР.
Исключение процесса модуляции ЭПР (т.е. ∆σ = 0 и σmax = σ) приводит это уравнение к традиционному виду уравнения радиолокации. Рабочая чувствительность считывателя SR учитывает соотношение сигнал/шум, необходимое для достижения заданной достоверности считывания (безошибочной идентификации) номера метки. Расчеты показывают, что для 100-битного номера и достоверности считывания метки 0,9999 соотношение сигнал/шум должно быть не менее 20 дБ.
Энергетическое уравнение характеризует максимальную дальность действия аппаратуры RFID с пассивными чиповыми метками, которая достигается при угловом и поляризационном согласовании антенн считывателя и метки, а также при согласовании импедансов антенны и чипа метки. Модуляционное уравнение характеризует максимальную дальность действия аппаратуры RFID с полуактивными метками, у которых энергопотребление чипа обеспечивается элементом питания.
5.2. Зависимость дальности действия от несущей частоты
В настоящее время технологии RFID в UHF и микроволновом диапазонах выделены радиочастоты 433 МГц, 860 - 960 МГц, 2,45 ГГц и 5,78 ГГц. Анализ технических характеристик аппаратуры различных производителей показывает, что дальность ее действия существенно различается в зависимости от диапазона несущих частот. С целью лучшей ориентации системных интеграторов и конечных пользователей в процессе выбора конкретной аппаратуры целесообразно рассмотреть зависимость дальности действия систем RFID от несущей частоты или длины волны сигнала. Для этого примем два предположения:
- Параметры P и GR считывателя будем считать фиксированными. Данное предположение позволяет сравнивать системы с равными энергетическими потенциалами и пространственными зонами считывания.
- Эффективная площадь Ae и вариация ЭПР ∆σ антенны метки пропорциональны квадрату длины волны сигнала λ, т.е. Ae = к1*λ и ∆σ = к2*λ , где к1 и к2 - коэффициенты пропорциональности. Данное предположение справедливо в большинстве практических случаев.
С учетом этого уравнения можно записать в следующем виде:
RЕ ≈λ
RМ ≈λ
Следовательно, при прочих равных условиях дальность действия систем радиочастотной идентификации с пассивными и полуактивными чиповыми метками приблизительно пропорциональна длине волны сигнала. Такой вывод соответствует данным из технических характеристик аппаратуры различных производителей: в диапазоне 900 МГц дальность действия составляет 5...6 м, а в диапазоне 2,45 ГГц - 1,5...2 м, при этом соотношение длин волн этих диапазонов близко к 3. С точки зрения достижения максимальной дальности предпочтителен диапазон 433 МГц. Однако здесь
для обеспечения эффективности излучения требуются слишком большие габариты антенн. Кроме того, в связи с малой шириной выделенного диапазона частот могут возникать проблемы электромагнитной совместимости. По этим причинам в настоящее время наибольшее распространение находят системы RFID UHF диапазона 860 - 960 МГц.
5.3 Зависимость дальности действия от глубины модуляции
Глубина модуляции сигнала в системах RFID не выступает в качестве основной технической характеристики аппаратуры. Этот параметр фигурирует лишь в описаниях радиоинтерфейсов - протоколов обмена командами и данными между считывателем и меткой. Однако глубина модуляции сигнала определяет величину энергетического коэффициента kE, который непосредственно влияет на энергетическую дальность действия RЕ системы. От глубины модуляции зависит и ∆σ - вариация ЭПР антенны метки, что влияет на модуляционную дальность действия Rm аппаратуры. Кроме того, глубина модуляции определяет ширину спектра сигнала, который является важным параметром при обеспечении административных норм электромагнитной совместимости (ЭМС). Проведем раздельный анализ влияния глубины амплитудной модуляции сигнала в прямой линии Mf и в обратной линии Mr на дальность действия аппаратуры RFID. Для проведения количественных оценок будем использовать международный стандарт ISO 18000-6, в котором предписываются номинальные значения глубины модуляции сигнала в прямой линии для варианта А - 30% и для варианта В - 15% или 99%.
В прямой линии Mf является параметром сигнала считывателя. Его величина может изменяться в пределах от 0 до 100%. Можно показать, что коэффициент kE связан с глубиной модуляции зависимостью:
kE = [(1 - Mf)2 + Q • Mf2], (3)
где Q - скважность кодового сигнала.
На рис.5.1 показана зависимость коэффициента kE от глубины модуляции Mf для различных значений Q.
Рис.1. Зависимость коэффициента kE от глубины модуляции Mf.
Согласно IS018000 выбор конкретного значения скважности модулирующего сигнала остается за национальными администрациями, однако практически удобно использовать кодирование с Q * 0,5. При произвольной глубине модуляции и Q = 0,5 энергетический коэффициент kE равен
Из рассмотрения рис.5.1 видно, что в этом случае kE минимален при Mf = 0,65 и согласно уравнению (1) применение модуляции такой глубины с точки зрения энергообеспечения метки наименее выгодно. При величине Mf = 1, соответствующей модуляции ООК, которая реализуется в большинстве систем RFID, kE = 0,5.
Теперь обратимся к уравнению модуляционной дальности. Можно показать, что вариация ЭПР ∆σ= σ • Mr2, где Mr 2- глубина модуляции сигнала на входе антенны метки. Тогда дальность считывания пассивных меток в обратной линии системы RFID примет следующий вид
Также можно показать, что при манипуляции активными импедансами в нагрузке полуволнового вибратора ∆σ << 0,75σmax , т.е. максимально достижимая глубина амплитудной модуляции Mr max = (0,75)2 = 0,866.
В результате расчета для типичных значений параметров стационарного считывателя в диапазоне 900 МГц (P = 1 Вт, Gr = 4, λ = 30 см, SR = - 100 дБВт, kE = 0,5) и меток с антенными в виде полуволновых диполей (Ae = 0,01 м2 , ∆σ = 0,06 м2 , S = 30 мкВт) позволяет получить: энергетическая дальность Re ≈ 7 метров, а модуляционная дальность Rm ≈ 25 метров. Таким образом для грамотного проектирования аппаратуры RFID необходимо оперировать двумя параметрами - энергетической и модуляционной дальностью. При этом дальность действия систем с полуактивными метками существенно больше дальности действия систем с пассивными метками. Повышение дальности, однако, достигается за счет усложнения, удорожания и сокращения срока службы метки. Именно поэтому пассивные метки в настоящее время находят значительно более широкое применение.
5.4 Определение технических параметров аппаратуры
Использование уравнений позволяет в процессе проектирования определять технические параметры аппаратуры RFID, которые обеспечивают необходимую дальность действия.
Первым необходимым условием достижения заданной дальности R действия аппаратуры RFID с пассивными чиповыми метками является выбор параметров, соответствующих энергетическому уравнению. Проектирование считывателя, в результате которого определяются параметры λ, P, GR и SR , мало отличается от проектирования обычных приемных и передающих устройств. Из-за технических и стоимостных ограничений наиболее сложной задачей является проектирование метки (т.е. определение параметров Ae, S и ∆σ). Поскольку S - минимальная рабочая чувствительность чипа, определена его производителями, а число производителей в мире чипов UHF диапазона крайне невелико, в первую очередь проектирование метки сводится к проектированию ее антенны с необходимой эффективной площадью Ae и вариацией ЭПР ∆σ.
На основании энергетического уравнения первое условие обеспечения R > Re можно записать следующим образом:
Ae > 4π R2 S / kE P Gr .
Вообще безразмерная величина (S/P•GR) может являться интегральным параметром, который характеризует эффективность аппаратуры в целом и по которому можно сравнивать системы RFID с пассивными метками различных производителей.
Дальность действия систем RFID с пассивными метками, однако, зависит не только от обеспечения энергопитания чипа. При снижении чувствительности приемника SR или вариации ЭПР метки ∆σ возникает ситуация, когда RM < RE. В этом случае дальность действия системы с пассивной меткой будет определяться модуляционным уравнением.
Тогда, приравняв правые части обоих уравнений, для систем, у которых антенна метки является полуволновым диполем, получим второе условие обеспечения заданной дальности R > RM = RE :
∆σ > kE2*P*SR*Ae*GD /S2,
где Gd - усиление полуволнового диполя.
В результате, исходя из заданной дальности действия R и известных параметров аппаратуры (λ, P, GR , SR и S), можно определить два основных параметра метки: Ae и ∆σ - эффективную площадь и вариацию ЭПР ее антенны соответственно.
Таким образом, использование двух уравнений радиочастотной идентификации позволяет обеспечить проектирование систем RFID с пассивными и полуактивными метками для различных условий применения.
6 Протоколы команд
После рассмотрения электродинамических, связных, административных и аппаратурных ограничений в технологии RFID, необходимо обратиться к алгоритмам и командным протоколам верхнего уровня, которые собственно осуществляют идентификацию меток.
Поскольку метка является простым носителем идентификационного номера, появляется задача точного чтения этого номера. Если в рабочей зоне считывателя находится единственная метка, не требуется никаких команд. При достаточной энергетике метка просто передает свои содержащиеся в ней данные. Однако, если в рабочей зоне считывателя находится множество меток, отвечающих одновременно, их сигналы интерферируют. Такое наложение сигналов в нашем случае называется коллизией, а результаты считывания чаще всего оказываются потерянными. Для избежания коллизий система RFID требует формирования команд, основанных на некоторых протоколах. Такие протоколы обычно называют антиколлизионными протоколами или алгоритмами.
Для того чтобы выбрать необходимый антиколлизионный протокол и команды, следует рассмотреть системные ограничения. Особое внимание следует обратить на надежность коммуникации (связи) и ширину спектра, а также на технические параметры чипа метки, которые непосредственно влияют на потребляемую мощность и стоимость. В первую очередь необходимо сужать ширину спектра, повышать надежность связи и минимизировать требования к чипу метки.
Для того чтобы успешно взаимодействовать с одной меткой среди множества меток, находящихся в поле считывания, необходимо реализовать эксклюзивный канал связи с этой меткой. Для этого существует достаточное количество решений -алгоритмов. После обзора этих алгоритмов мы проанализируем реализацию и ограничения двух наиболее распространенных из них. После этого мы обсудим основные командные требования, связанные с этими алгоритмами.
6.1. Обзор антиколлизионных алгоритмов
По мере увеличения числа маркируемых объектов вероятность одновременно считываемых меток увеличивается. Соответственно возрастает вероятность коллизий сигналов. Поэтому и в настоящее время существует и в будущем возрастает необходимость в эффективных антиколлизионных алгоритмах.
Антиколлизионные алгоритмы, используемые в системах RFID, сходны со способами разрешения конфликтных ситуаций множественного коммуникационного доступа и с различными сетевыми протоколами, включая протоколы Aloha и семейство протоколов CSMA (Carrier Sense Multiple Access). Реализация антиколлизионных алгоритмов в технологии RFID, однако, ограничена низкой потребляемой мощностью и малым объемом, а иногда и полным отсутствием памяти метки. Кроме того, алгоритмы должны быть оптимизированы с учетом малого энергопотребления меток, чтобы не снижать дальность в случае пассивных, или увеличивать срок службы элемента питания в случае активных меток. К тому же из-за того, что метки способны взаимодействовать только со считывателем, использование методов CSMA невозможно. Более того, вариации параметров канала распространения сигнала в беспроводных каналах связи значительно больше аналогичных вариаций в проводных каналах - импульсные шумы крайне неблагоприятно влияют на относительно кратковременные сеансы связи между считывателем и меткой. Сложность алгоритмов также должна быть минимизирована, так как это приводит к увеличению стоимости аппаратуры.
Существует большое разнообразие антиколлизионных методов, которые могут классифицироваться различными способами. Наиболее общими классификационными признаками являются: пространство, частота и время (рис.6.1).
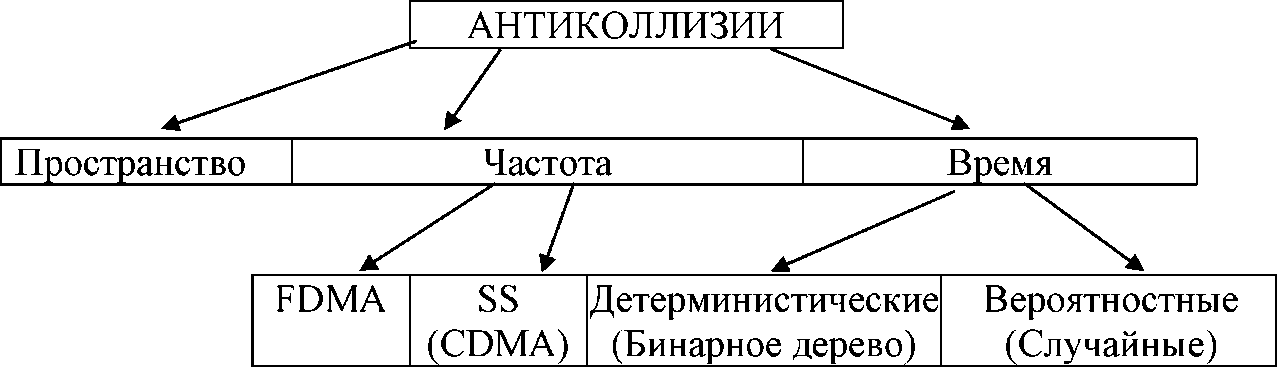 Рис.6.1. Классификация антиколлизионных алгоритмов.
Рис.6.1. Классификация антиколлизионных алгоритмов.
|
В случае пространственных алгоритмов метки обычно локализуются в пространстве таким образом, чтобы обеспечить их последовательное считывание. Это достигается изменением зоны считывания или, в случае пассивных меток, вариацией мощности, излучаемой считывателем. Известен способ, использующий обе эти возможности на основе определения максимального отклика меток на различных расстояниях. Другой способ использует ряд считывателей с малой дальностью действия, такой, которая обеспечивает считывание только одной метки в поле каждого считывателя в данное время. Еще в одном способе разделения меток и их последовательного считывания предлагается триангуляционное использование сверхширокополосной связи с определением местоположения. Основной проблемой пространственных методов является сложность достижения высокой точности определения дальности. Требования к точности определения дальности еще более возрастают с увеличением числа меток в зоне действия считывателя и, соответственно, уменьшением расстояния между ними. В настоящее время считается, что наилучшим является использование пространственных методов в сочетании с частотными и временными методами.
Для обеспечения уверенной беспроводной связи обычно используются частотные методы. Системы FDMA (Frequency Domain Multiple Access) используют разделение общей полосы частот на фиксированное число каналов. В системах RFID низкой стоимости такое решение не применимо, так как при этом потребуются высокостабильные генераторы и селективные полосовые фильтры. Технология Magellan использует комбинацию FDMA и TDMA (Time Domain Multiple Access) методов. Поскольку достоинства такой системы недостаточно обоснованы, не очевидно как это повлияет на технические характеристики и стоимость системы RFID.
Системы CDMA (Code Domain Multiple Access) имеют много преимуществ перед FDMA системами, так как они лучше адаптированы к изменению трафика, имеют большую емкость и простое управление процессом. Системы, основанные на применении CDMA и SS (Spread Spectrum) методов достаточно сложны и дороги. К тому же их использование может ограничиваться частотными ресурсами, предусмотренными в регламентах. Поэтому SS методы, включая FH (Frequency Hopping) и DS (Direct Sequence), могут быть реализованы только в UHF или микроволновом диапазонах, где имеются соответствующие частотные ресурсы.
Подавляющее число антиколлизионных алгоритмов в технологии RFID основано на использовании временных методов, в которых момент передачи сигнала изменяется во времени. Эти алгоритмы подразделяются на детерминистические и вероятностные.
Детерминистический алгоритм реализуется, когда считыватель генерирует запрос или команду, которая возбуждает определенную метку с уникальным идентификационным номером UID (Unique Identification Number). На основании этого номера считыватель или перебирает список известных номеров, или выполняет определенные действия по поиску бинарным способом. Переборные методы особенно эффективны, когда в зоне действия считывателя находится небольшое количество меток. При этом также требуется предварительное знание всех номеров меток.
В настоящее время наиболее широкое применение находят бинарные алгоритмы. Компания TI (Texas Instrument) использует бинарный алгоритм. Существуют различные варианты такого алгоритма. Компания Jacomet и др. предложила относительный алгоритм бинарного поиска. Компания SCS предложила другой вариант этого алгоритма. Некоторые алгоритмы бинарного поиска могут быть достаточно быстродействующими, однако все же они работают достаточно корректно, если в течение поиска в поле считывания не появляются дополнительные метки.
Вероятностные алгоритмы - это такие методы разрешения коллизий, когда метки в поле считывателя генерируют сигналы в случайные моменты времени. Существует большое число решений, когда считыватель различным образом управляет метками. Значительное число способов основывается на протоколе Aloha, предназначенном для множественного сетевого доступа. По этой схеме узел передает пакет после приема пакета. В случае возникновения коллизии узел входит в насыщение и передает пакет снова после случайной задержки. В стробированном варианте протокола Aloha (slotted Aloha) передача пакета производится в течение фиксированного периода, большего некоторого известного постоянного времени. В патенте Furuta описывается вариант такого протокола для бесконтактных персональных карт. Международный стандарт ISO 15693 поддерживает метод, аналогичный стробированному ва
Дата добавления: 2016-06-15; просмотров: 6096;
Поиск по сайту
Узнать еще
- АХ, нелинейные искажения, динамический диапазон усиления
- Биологические эффекты электромагнитного излучения миллиметрового диапазона
- В ультрафиолетовом (УФ), видимом и инфракрасном (ИК) диапазонах
- ВЛИЯНИЕ ФИЗИЧЕСКИХ ХАРАКТЕРИСТИК НА ДИАПАЗОН СКОРОСТЕЙ
- Влияние электромагнитного излучениямиллиметрового диапазона на экспрессию ангиотензина - 2 в клетках эндотелия сосудов при старении
- Влияние электромагнитного излучениямиллиметрового диапазона на экспрессию молекулы адгезии ICAM в клетках эндотелия сосудов при старении
- ВОЗВРАТ К ГРАНИЦАМ ШИРОКОДИАПАЗОННОГО ДНЯ
- Выделение цветовых диапазонов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
