Дифференциальным зубчатым механизмом будем называть зубчато-рычажный механизм, имеющий две или более степеней подвижности и предназначенный для сложения (разложения) скоростей.
Схема одного из возможных дифференциальных механизмов изображена на рисунке 1. Звено Н (от немецкого слова Habel – рычаг), на котором установлены колёса 2 и 2' c подвижной геометрической осью, называется водилом. Звено 2, совершающее сложное движение (вращение вокруг своей оси и вращение вместе с водилом вокруг оси колеса 3), называется сателлитом. Колёса, оси которых совпадают с осью водила, называются центральными.
Для изображённого механизма степень подвижности будет равна

Степень подвижности W механизма показывает, что двум звеньям дифференциала необходимо сообщить независимые движения (задать два закона движения), чтобы получить определённость движения всех остальных звеньев.
Для того, чтобы можно было использовать выражение (5), воспользуемся методом обращённого движения, который позволяет остановить одно звено в механизме, а все остальные звенья изменят свою угловую скорость на одну и туже величину. При этом относительные скорости звеньев в механизме не изменятся.

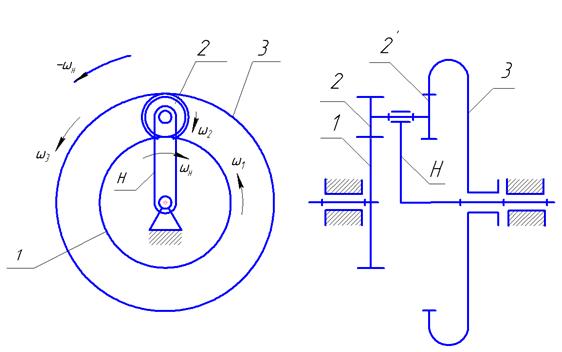
Рисунок 1. Схема дифференциального механизма
Дадим всему механизму (вместе со стойкой) угловую скорость –ωн, тогда угловые скорости звеньев механизма в обращённом движении (ωН) будут равны

Т.е., водило остановится (фактически будет являться стойкой) и мы получим механизм с неподвижными осями колёс. Теперь можно воспользоваться выражением (5).
В общем случае, для любого дифференциального механизма, можно записать (формула Виллиса для дифференциального механизма)
 (6)
(6)
где  - передаточное отношение от k-го звена к l-му в «обращённом» механизме (в предположении, что водило Н неподвижно)
- передаточное отношение от k-го звена к l-му в «обращённом» механизме (в предположении, что водило Н неподвижно)
Планетарные механизмы
Планетарным будем называть зубчато-рычажный механизм, имеющий одну степень подвижности.
Если в предыдущем механизме с W =2 одно из центральных колёс прикрепить к стойке (т.е. сделать неподвижным), то получится планетарный механизм (рисунок 2)
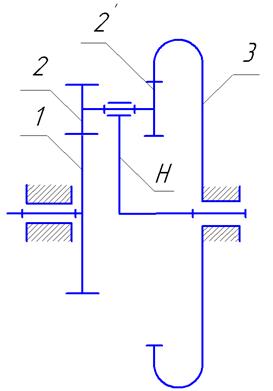
Рисунок 2. Схема планетарного механизма
Степень подвижности этого механизма

В планетарном механизме ω3 = 0, тогда формула Виллиса (6) будет иметь вид
или
 (7)
(7)
Где  - передаточное отношение от колеса 1 к водилу Н.
- передаточное отношение от колеса 1 к водилу Н.
В общем случае для любого планетарного механизма можно определить передаточное отношение от подвижного колеса к водилу (формула (8)).
 (8)
(8)
Где 0 – номер неподвижного центрального колеса, которое называется опорным.
 - передаточное отношение от подвижного колеса k к неподвижному О в «обращённом» движении.
- передаточное отношение от подвижного колеса k к неподвижному О в «обращённом» движении.
По формуле (8) можно определить любое передаточное отношение между подвижными звеньями в планетарном механизме.
- от колеса к колесу  (9)
(9)
- от водила к колесу  (10)
(10)
Кроме аналитического метода определения передаточного отношения в зубчатом механизме по числу зубьев существует и графический метод, который можно посмотреть в литературе [1,2].
Дата добавления: 2022-05-27; просмотров: 182;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
