Биоуправляемые протезы конечностей
К классическим биотехническим системам относятся биоуправляемые протезы конечностей. Идея построения биоуправляемых протезов основана на использовании биотоков, посылаемых организмом в адрес отсутствующих конечностей. Сами по себе биотоки для управления механическими приводами протезов использоваться не могут. Однако они могут быть использованы для анализа средствами вычислительной техники, которые по специально разработанным программам способны организовать адекватное управление исполнительными механизмами.
Существуют два способа управления протезами конечностей - без обратной связи и с ОС.
В первом варианте механические реакции конечностей определяются только импульсной активностью биообъекта и совершаемые движения технически не корректируются в зависимости от совершенного двигательного акта Рисунок.

Информация, посылаемая в адрес отсутствующей части тела, снимается с биообъекта (БО) системой датчиков нейронной активности (ДНА), усиливается усилителями биопотенциалов (УБП) и через аналогово-цифровой преобразователь (АЦП) передается в микропроцессор (МП), где сигналы биоэлектрический активности анализируются, расшифровываются и преобразуются в последовательность сигналов. Эти сигналы способны обеспечить такое управление исполнительными механизмами (ИМ) протеза конечностей (ПК), чтобы движение искусственной конечности как можно более точно повторило траекторию движения, ожидаемую человеком. Передача управляющих сигналов от МП к ИМ осуществляется через ЦАП и УМ. Разомкнутая система (рисунок).
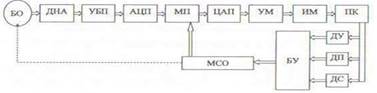 Контур обратной связи начинается с датчиков усилий (ДУ), положения в пространстве (ДП), скорости (ДС) и других датчиков, если они предусмотрены медико-техническими требованиями. Далее информация с датчиков усиливается блоком усилителей (БУ) и передается в модуль сопряжения с объектом (МСО). В МСО информация готовится для обмена с микропроцессором и, по мере готовности, совершается цикл обмена. Таким образом, для коррекции траектории движения микропроцессор будет получать информацию как со стороны биообъекта, так и со стороны протеза, совершающего заданные действия. Эта дополнительная информация позволяет уточнить характер требуемых действий, повышая точность работы исполнительных механизмов.
Контур обратной связи начинается с датчиков усилий (ДУ), положения в пространстве (ДП), скорости (ДС) и других датчиков, если они предусмотрены медико-техническими требованиями. Далее информация с датчиков усиливается блоком усилителей (БУ) и передается в модуль сопряжения с объектом (МСО). В МСО информация готовится для обмена с микропроцессором и, по мере готовности, совершается цикл обмена. Таким образом, для коррекции траектории движения микропроцессор будет получать информацию как со стороны биообъекта, так и со стороны протеза, совершающего заданные действия. Эта дополнительная информация позволяет уточнить характер требуемых действий, повышая точность работы исполнительных механизмов.
Следует отметить, что при кажущейся простоте структурной организации биоуправляемых протезов при их практической реализации возникают достаточно большие проблемы, связанные с расшифровкой команд нейронной активности, ориентированной на реализацию двигательных актов, построением алгоритмов и программ управления исполнительными механизмами, разработкой высокоточных и миниатюрных исполнительных механизмов и т. д. Эти и ряд других трудностей не позволяют широко внедрить в медицинскую практику этот класс протезов. Они редко выходят за рамки лабораторных и опытных образцов.
Дата добавления: 2021-09-07; просмотров: 820;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
