Принцип получения цифровых снимков
В настоящее время цифровые изображения (снимки) в основном получают либо при фотографировании объектов цифровыми камерами, либо путем сканирования их фотографических изображений.
И в том и в другом случаях изображение, сформированное посредством объектива, (Рис 5) попадает не на пленку, а на светочувствительный сенсор (матрицу). Свет улавливается множеством крошечных элементов сенсора (пикселов), каждый их которых формирует электрический заряд, в соответствии с количеством попавшего на него света, а затем заряд преобразуется в код и запоминается в цифровой форме. Pixel от англ. picture element - элемент изображения.
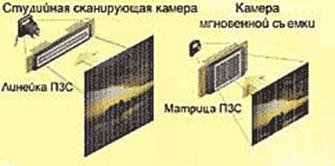
Рис. 5
В производстве сенсоров применяются две технологии: ПЗС (прибор с зарядовой связью, английский вариант названия - ССD — charge-coupled device) и КМОП (комплиментарный металлоксидный полупроводниковый прибор, английский вариант - CMOS). Первая технология старше второй, а потому и сенсоры ПЗС лучше.
ПЗС это монолитный чип представляющий собой совокупность мельчайших датчиков-фотоэлементов, тем или иным способом собранных в единую матрицу.
Появление ПЗС в какой то степени связано с попыткой в начале 60-х годов прошлого века заменить вакуумную передающую трубку твердотельным приемником изображения. Принцип зарядовой связи продемонстрировали экспериментально в 1970 году сотрудники фирмы Bell Laboratories У. Бойл и Дж.Смит, а уже в середине 70-х появились первые коммерческие матрицы производства фирм Fairchild, Bell и RCA в США, а также Phillips в Европе, совместимые с ТВ стандартом (т.е. имеющие разрешение по вертикали 476 и 576 строк – соответственно для американского и европейского стандартов разложения). Ну а вскоре в Японии было налажено массовое производство недорогих ПЗС приемлемого качества для бытовой электроники, и на смену кинокамерам пришли видеокамеры. Революционное воздействие оказали ПЗС на астрономию, где их появление по степени влияния сравнимо разве что с тем, которое оказало применение фотопластинок в качестве средств регистрации вместо человеческого глаза. Ну и, наконец, микроскопия в медицине и биологии, компьютерное зрение и видеоконференции, системы ориентации космических аппаратов и считыватели штрих-кода, телефакс и сканер…- все это стало возможным и доступны благодаря ПЗС.
Для того, чтобы понять, как ПЗС работает, представим себе МОП (металл – окисел – полупроводник) конденсатор. В принципе это просто электрод, отделенный от кремния (полупроводника) слоем диэлектрика. Для определенности будем полагать, что полупроводник p – типа, то есть концентрация дырок в нем в равновесных условиях на несколько порядков больше, чем концентрация электронов. Если на такой электрод (его называют затвором) подать положительный потенциал, электрическое поле, проникая через диэлектрик, отталкивает подвижные дырки и возникает обедненная область – некоторый слой кремния, свободный от основных носителей. При параметрах полупроводниковых подложек, типичных для ПЗС, глубина этой области составляет около 5 мкм. Напротив, электроны, если они каким либо образом окажутся вблизи (например, в результате фотогенерации), притянутся к затвору, и будут накапливаться на границе раздела - окисел-кремний непосредственно под затвором, то есть сваливаться в яму, которая совершенно официально называется потенциальной ямой (рис. 6 а). Электроны частично нейтрализуют электрическое поле, задаваемое в полупроводнике затвором, и возникающий в потенциальной яме заряд будет равен количеству света
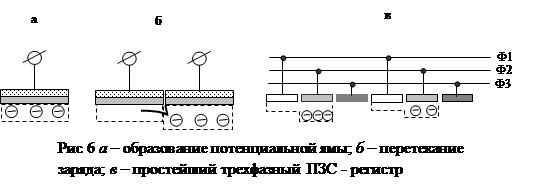 |
попавшего на датчик.
Пусть теперь рядом с затвором расположен еще один, и на него тоже подан положительный потенциал, причем больший, чем на первый (рис. 6 б). Когда затворы расположены достаточно близко, их потенциальные ямы объединяются, и электроны, находящиеся в первой потенциальной яме, перемещаются в соседнюю, т.к. ее потенциал выше. Если имеется цепочка затворов, то можно, подавая на них соответствующие управляющие напряжения, передавать локализованный зарядовый пакет вдоль такой структуры. Важно то, что для управления цепочкой затворов любой длины достаточно трех тактовых шин (рис 6 в). Действительно, для передачи зарядовых пакетов необходимо и достаточно трех электродов: одного передающего (где сформировался заряд), одного принимающего и одного изолирующего, разделяющего пары передающих и принимающих друг от друга. Одноименные электроды таких троек могут быть соединены друг с другом в единую тактовую шину, требующую лишь одного внешнего вывода. Это простейший трехфазный регистр сдвига на ПЗС. Для нормальной его работы в каждый момент времени, по крайней мере, на одной тактовой шине должен присутствовать высокий потенциал, и, по крайней мере, на одной – низкий (потенциал барьера). При повышении потенциала на одной шине и понижении его на шине предыдущей происходит одновременная передача всех зарядовых пакетов под соседние затворы. А за полный цикл (один такт на каждой фазовой шине) происходит сдвиг зарядовых пакетов на один элемент регистра. Такое свойство ПЗС называют самосканированием.
Для локализации зарядовых пакетов в поперечном направлении формируются так называемые стоп каналы – узкие полоски с повышенной концентрацией основной легирующей примеси, идущие вдоль канала переноса (Рис 3). Повышенная концентрация дырок препятствует возникновению потенциальных ям в каналах переноса (чем их больше, тем труднее их отогнать, и электроны там не накапливаются). Для улучшения работы (а неприятности могут возникать из-за нарушения однородности кристаллической решетки подложки) в 1972 году были предложены ПЗС со скрытым каналом. От рассмотренного варианта последний отличается тем, что в поверхностной области кремния создаемся тонкий (не более 0.5 мкм) слой с проводимостью противоположного подложке типа и с такой концентрацией примеси, чтобы он мог полностью обедняться при подаче на него напряжения.
 |
Первые матрицы были с электродами, которые формировались из металла (молибдена), но была большая вероятность замыкания металлических фаз друг на друга (а значит потеря работоспособности матрицы). В 1974 году были предложены электроды из поликристаллического кремния.
Достоинства ПЗС: жесткий растр, который задается с высокой точностью в процессе изготовления, так что геометрические качества изображения зависят только от качества оптики.
Одной из важнейших характеристик светочувствительного сенсора является его физический размер. Размеры сенсора определяются длиной его диагонали, и измеряются в дюймах. Стандартный ряд типоразмеров светочувствительных матриц - 1/3, 1/2, 2/3 дюйма, есть и больше, например 5/3. При одинаковом разрешении (количестве ячеек) матрица большего размера лучше, чем матрица меньшего размера. Она способна воспринять больше ступеней перепадов яркости между абсолютно-белым и абсолютно-черным цветами. Количество этих градаций называется динамическим диапазоном и определяется числами диафрагм: 2, 2.8, 4 и т.д.
Динамический диапазон ПЗС является очень важной характеристикой качества изображения и соответствует понятию фотографической широты пленки.
Другой важный параметр сенсора - его светочувствительность, Она тоже зависит от физического размера сенсора, точнее, от размера ячейки. Обычная светочувствительность эквивалентна 80-200 ISO. Есть модели с очень высокой чувствительностью для специальных съемок. Но чаще всего высокая чувствительность означает низкое разрешение (и более низкое качество снимков с высоким разрешением). Некоторые камеры могут менять чувствительность (автоматически или вручную от 100 до 400, иногда 800 ISO). Увеличение чувствительности происходит на стадии обработки информации с матрицы путем усиления сигнала. Одновременно с полезным сигналом усиливаются и шумы, так что злоупотреблять этим нельзя. В профессиональных матрицах размер ячейки достигает 13 мкм (правильней - квадрат со стороной в 13 мкм), что обеспечивает светочувствительность до 1600 единиц ISO.
Но наиболее важный параметр, это разрешение цифровой камеры. Оно определяется количеством светочувствительных ячеек, расположенных на матрице. Стандартный ряд начинается с 350 тыс. пикселов, что соответствует экранному изображению стандарта VGA — 640x480 пикселов. Фотография хорошего качества (без пробелов, заметных цветных точек, яркая и четкая), снятая с разрешением 350 тыс. пикселов, при печати на струйном принтере получится чуть больше почтовой марки. Сенсор с разрешением 1 млн пикселов позволяет получить отпечаток размером 9x12 см и экранное представление больше, чем XGA - 1024x768 пикселов. Отпечатки еще большего формата - 10x15 см (самый популярный потребительский формат) получатся при разрешении светочувствительной матрицы в 1,3 млн пикселов. Матрицы разрешением в 2,1 млн пикселов и более позволяют получать распечатки фотографий большого формата при умеренном динамическом диапазоне и невысокой чувствительности цифровой камеры. Камеры с матрицами разрешением в 4 млн пикселов и более позволяют печатать фотографии выставочного формата, но с предварительной обработкой в графическом редакторе. Рост разрешения, естественно, приводит к увеличению размера графического файла.
Еще одна немаловажная характеристика светочувствительных матриц - соотношение уровней сигнала и шумов. Это соотношение тесно связано с динамическим диапазоном сенсора. Обычно матрицы с низким динамическим диапазоном имеют высокий уровень шумов (около 10 - I5 дБ). Уровень шума возрастает при увеличении чувствительности сенсора. На практике шумы проявляются в виде различных цветовых искажений и высокой зернистости изображения. Изображение становится структурным (словно создано из отдельных песчинок), на линиях цветовых переходов образуются ореолы - так называемые «факелы».
Производство сенсоров крайне трудоемкая и технологически сложная задача. Выпускают их ограниченное число компаний, а выход годной продукции не превышает 2%. Отсюда и стоимость цифровых фотоаппаратов.
Даже прошедший заводскую отбраковку сенсор имеет «мертвые» участки. То есть некоторые из элементов не работают изначально (слишком малы их размеры, слишком велики технологические допуски при массовом производстве). Поскольку пороки эти микроскопичны, достаточно восполнить недостаток информации с «мертвого» светочувствительного элемента усредненным значением яркости засветки сенсора, полученным с соседних, работающих участков. Эта операция называется коррекцией.
Интерполяция работает так же, но служит не для коррекции изображения, полученного при помощи сенсора, а для программного увеличения его разрешения. К примеру, сенсор с разрешением в 1,3 млн пикселов можно заставить выдать изображение с разрешением в 2 млн пикселов, добавив к истинным точкам дополнительные, построенные по алгоритму усредненных значений. Ясно, что коррекция и интерполяция способствуют снижению качества изображения, которое становится «размытым».
Простой замер интенсивности света, попавшего на ПЗС-матрицу, может породить только черно-белое изображение, поэтому перед ней помещают цветные фильтры.
Самой популярной технологией получения цветного изображения является однокадровая с одной матрицей, состоящая из триад (Рис.4 слева). Перед каждым элементом триады устанавливается микроскопический светофильтр одного из базовых цветов (красный, зеленый, синий). Их сочетание дает полный спектр. Но существуют еще три технологии, применяемые гораздо реже:
1) Схема задней развертки изображения. Она похожа на принципиальную схему планшетного сканера. Сканирующая головка движется вдоль короткой стороны кадрового окна (сверху вниз) и считывает информацию построчно. Сканирующая линейка состоит из трех рядов светочувствительных элементов, каждый из которых закрыт светофильтром одного из базовых цветов (красный, зеленый, голубой). Поскольку сканирование идет построчно (один ряд пикселов за каждый шаг), выдержка становится недопустимо длинной. Подобные фотоаппараты применяются только для специальной съемки в стационарных условиях.
2) Быстрее работают трехкадровые фотоаппараты. В них экспозиция одного кадра производится трижды - через светофильтр базового цвета поочередно. В результате цветопередача получается максимального качества, но быстродействие системы не позволяет снимать движущиеся объекты. Трехкадровые фотоаппараты применяют для съемки архитектуры и репродукций.
3) Альтернативой быстродействующим системам с одной матрицей ПЗС можно считать только фотоаппараты с тремя матрицами (Рис 8 справа),

Рис. 8
каждая из которых фиксирует изображение за своим светофильтром одного из
базовых цветов. Специальная оптическая система (дихроичная призма) расщепляет сфокусированный объективом световой луч и направляет его на все три матрицы. Светофильтры, установленные перед каждой матрицей, пропускают только свою часть цветовой характеристики. После этого с помощью трех сенсоров картинка передается в электронный логический блок камеры, где становится одной фотографией, записанной во флэш-память в виде графического файла. В фотоаппаратах такую схему применяла только фирма Minolta (в дорогих профессиональных фотоаппаратах эта схема встречается чаще). Трехэлементный сенсор усложняет оптическую систему камеры и увеличивает ее габариты.
Применение сразу трех матриц позволяет получить очень высокое качество изображения. Но и втрое повышает стоимость фотоаппарата. Три матрицы устанавливаются в сменные крышки широкоформатных фотоаппаратов, которые стоят десятки тысяч долларов и предназначены исключительно для профессиональной цифровой фотосъемки. В литературе правда отмечается, невысокое разрешение (обычно 350 тыс. пикселов) подобной схемы цветопередачи.
Важной характеристикой матрицы ПЗС является метод считывания состояния ее ячеек. Существуют три типа сенсоров - с построчным, покадровым и построчно-кадровым переносом зарядов, накопленных ячейками матрицы при их засветке. Этот показатель отражает быстродействие сенсора. Значения, собранные по всей площади сенсора, выстраиваются с высокой точностью, создавая своеобразную «карту», на которой четко определено физическое расположение всех цветов и их интенсивность. В результате и получается цифровое изображение, которое записывается в виде цифрового файла. Такой файл состоит из множества единиц информации (битов), которые затем могут быть расшифрованы и прочитаны другим цифровым устройством, например, компьютером или принтером.
Каждый пиксел несет в себе информацию о цвете. Количество получаемых цветовых оттенков определяется способностью цифровой камеры (точнее, ее аналого-цифрового преобразователя) распознать и зафиксировать количество градаций каждого из базовых цветов. 8-битное кодирование цветового канала способно передать 256 оттенков цвета. При сложении базовых составляющих цвета получится, что при 8-битном кодировании каждого канала общая разрядность цвета составит 24 бита. При этом аналого-цифровой преобразователь способен оцифровать изображение с общим количеством цветовых оттенков 256x256x256=16 777 216. Еще большее количество цветов получается при 10- и 12-битном кодировании на каждый цветовой канал, что, в общем, дает 30-или 36-битную разрядность цвета — это прерогатива профессиональной съемочной техники.
Как отмечалось, с ростом разрядности цвета растет и размер графического файла, в котором хранится снимок. С ростом разрешения его размер растет еще больше.
Чтобы снимок, полученный цифровым способом, мог хотя бы приблизиться по качеству к снимку с пленочного негатива, каждый элемент сенсора должен иметь размер, который был бы сравним с частицей галогенида серебра пленочной эмульсии. Речь идет об элементе величиной с десяток микрон. Если учесть, что каждый светочувствительный элемент (пиксел) это сочетание трех более мелких субэлементов, снабженных индивидуальным светофильтром (красным, зеленым или голубым), то становится ясно, какая это сложная задача. На практике даже очень качественный и большой по физическим размерам сенсор обладает худшей разрешающей способностью, чем самая крупнозернистая фотопленка. Именно поэтому в цифровых камерах используются сложные механизмы программной коррекции и интерполяции изображения.
ЦЕНТРАЛЬНАЯ ПРОЕКЦИЯ СНИМКА И ОРТОГОНАЛЬНАЯ ПРОЕКЦИЯ ПЛАНА.
Пусть А, В, С и D (рис. 9) точки местности, а S – центр проекции. Тогда точки пересечения а, в, с, d плоскости Р с проектирующими лучами AS, BS, CS и DS есть центральные проекции соответствующих точек местности. Такую же центральную проекцию можно построить и в том случае, если плоскость проекции Р¢ провести по другую сторону от центра проектирования и на том же расстоянии от него. Действительно, если это сделать, то получим точки а¢, в¢, с¢ и d¢, причем согласно условию  ,
,  ,
,  и
и  . Плоскость Р проекции дает негативное (обратное) изображение точек местности, а Р¢ – позитивное (прямое). То есть, позитив получается, когда объект и плоскость проекции помещены по одну сторону от центра проектирования, а негатив, если они расположены по разные стороны от него. Поскольку негатив и позитив располагаются симметрично относительно центра проекции, то они одинаковы (конгруэнтны). Отметим, что изображение объекта на плоскости снимка, полученное в центральной проекции, называется перспективным изображением. Если центр проектирования перенести на бесконечно большое расстояние относительно местности, то проектирующие лучи будут взаимно параллельны. Их пересечение с перпендикулярной к ним плоскостью дает ортогональную проекцию точек местности. В топографии такая проекция (при условии, что проектирующие лучи отвесны) называется горизонтальной.
. Плоскость Р проекции дает негативное (обратное) изображение точек местности, а Р¢ – позитивное (прямое). То есть, позитив получается, когда объект и плоскость проекции помещены по одну сторону от центра проектирования, а негатив, если они расположены по разные стороны от него. Поскольку негатив и позитив располагаются симметрично относительно центра проекции, то они одинаковы (конгруэнтны). Отметим, что изображение объекта на плоскости снимка, полученное в центральной проекции, называется перспективным изображением. Если центр проектирования перенести на бесконечно большое расстояние относительно местности, то проектирующие лучи будут взаимно параллельны. Их пересечение с перпендикулярной к ним плоскостью дает ортогональную проекцию точек местности. В топографии такая проекция (при условии, что проектирующие лучи отвесны) называется горизонтальной.
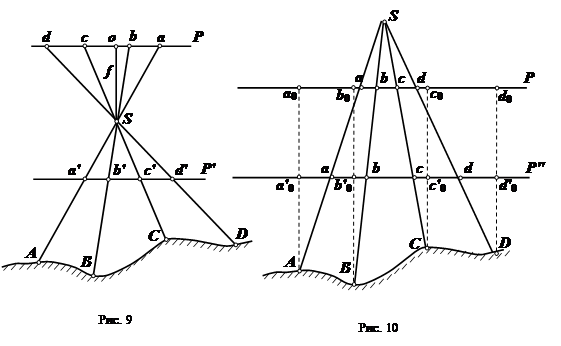 |
Отличие между ортогональной (горизонтальной) и центральной проекциями видно на рис. 10. Точки местности A, B, C и D изображаются на плоскости Р в центральной проекции в точках a, b, c, d, а в ортогональной проекции – в точкахao, bo, co, do. При перемещении плоскости проекции в положение Р" взаимное положение точек ao, bo, co, построенных в ортогональной проекции, не нарушится. В то же время точкиa¢, b¢, c¢, построенные в центральной проекции, свое взаимное положение изменят.
Понятно, что для составления плана участка местности по его изображению на снимке необходимо перспективное изображение преобразовать в ортогональное. Но переносом центра проектирования в бесконечность такое преобразование практически не осуществить. Поэтому необходимо найти косвенные пути решения задачи.
Дата добавления: 2017-05-02; просмотров: 5337;
Поиск по сайту
Узнать еще
- Cпособы получения частиц порошков
- I. Общие принципы структурно-функциональной организации клетки и её компоненты. Плазмолемма, её структура и функции.
- I. Этические принципы психолога
- II. Общие методические принципы в канистерапии
- II. Получение вращающегося магнитного поля и принцип действия АД.
- II. Принцип действия и режимы работы синхронной машины
- II. Электрическая схема и принцип действия.
- III. Принцип действия

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
