Двухстоечные вращатели-позиционеры
Двухстоечные позиционеры изготовливают для продолжительной тяжелой работы с грузоподъемностью от 2 до 300 тонн. Они снабжаются индивидуальными или установленными на рельсах неприводными стойками, способными к перемещению для заготовок различных длин. Мотор-редукторы с постоянной или переменной скоростью вращения передают вращение на стальную план-шайбу с вырезами. В позиционерах может быть использована одна приводная стойка совместно с опорной стойкой или обе приводные стойки. Когда приводная и не приводная стойки используются вместе на длинных заготовках, грузоподъемность этих двух стоек можно сумировать, если груз распределен одинаково между двумя план-шайбами.
Рисунок 71 – Примеры двухстоечных вращателей-позиционеров фирмы BODE
Таблица – Технические характеристики позиционеров фирмы BODE
| МОДЕЛЬ | Грузоподъемность (кг) | Привод вращения (кВт) | Диаметр план-шайбы (мм) | Высота оси детали (мм) | Скорость вращения (об/мин) |
| HT 5 | 0,37 | 0,036 - 1,0 | |||
| HT 10 | 0,37 | 0,036 - 1,0 | |||
| HT 20 | 1.000 | 0,55 | 0,036 - 1,0 | ||
| HT 40 | 2.000 | 0,75 | 0,036 - 1,0 | ||
| HT 60 | 3.000 | 1,1 | 0,036 - 1,0 | ||
| HT 80 | 4.000 | 1,1 | 1.070 | 0,036 - 1,0 | |
| HT 100 | 5.000 | 1,1 | 1.220 | 0,036 - 1,0 | |
| HT 120 | 6.000 | 1,1 | 1.220 | 1.000 | 0,036 - 1,0 |
| HT 150 | 7.500 | 1,1 | 1.525 | 1.000 | 0,036 - 1,0 |
| HT 200 | 10.000 | 1,5 | 1.525 | 1.050 | 0,036 - 1,0 |
| HT 300 | 15.000 | 2,2 | 1.525 | 1.250 | 0,036 - 1,0 |
| HT 400 | 20.000 | 5,5 | 1.830 | 1.540 | 0,023 - 0,65 |
| HT 500 | 25.000 | 6,0 | 1.830 | 2.000 | 0,023 - 0,66 |
Манипуляторы
Манипуляторы — устройства, обеспечивающие вращение изделия с заданной рабочей скоростью при различных углах наклона оси вращения изделия. Область применения — автоматическая и полуавтоматическая сварка. На рисунке 43, 44 приведены основные структурные схемы манипуляторов.
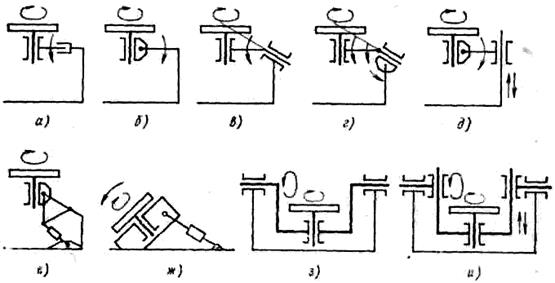
а – консольный; б – карусельный; в, г – консольные с частичным и полным уравновешиванием относительно оси наклона; д – карусельный с вертикальным подъемом; е – карусельный с радиальным подъемом; ж – рычажно-секторный; з, и – карусельные с частичным и полным уравновешиванием относительно оси наклона
Рисунок 72 – Структурные схемы манипуляторов


а б
а — одностоечный; б — двухстоечный
Рисунок 73 –Манипуляторы
Дата добавления: 2022-05-27; просмотров: 173;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
