Непрерывное, релейное и импульсное регулирование
В зависимости от принципа формирования регулирующего воздействия САР делят на системы непрерывного и прерывистого (дискретного) действия.
В непрерывной системе необходимая для управления информация есть в любой момент времени, сигналы (воздействия) в ней непрерывны во времени и по уровню. Связи между элементами сохраняются всегда, т.е. любое непрерывное изменение входного сигнала во времени вызывает также непрерывное изменение входных и выходных сигналов у всех последующих элементов. Статические характеристики всех элементов непрерывны, регулирующее воздействие — непрерывная функция входного сигнала. Если, например, входной сигнал x(t)в системе меняется так, как показано на рисунок 5.12, а,то и регулирующее воздействие на ее выходе yн(t)имеет такой же (рисунок 5.12, б)характер изменения (при условии, что ни один из элементов системы не вошел в зону насыщения). Примеры систем непрерывного действия — это САР, показанные на рисунок 5.12.
Линейной называют САР, все элементы которой описываются линейными дифференциальными или разностными уравнениями. В отличие от линейной в нелинейной САР непрерывная связь между входящими в нее элементами также сохраняется, но нет пропорциональности между регулирующим воздействием на ее выходе и текущим значением входного сигнала (пунктир на рисунок 5.12, б).
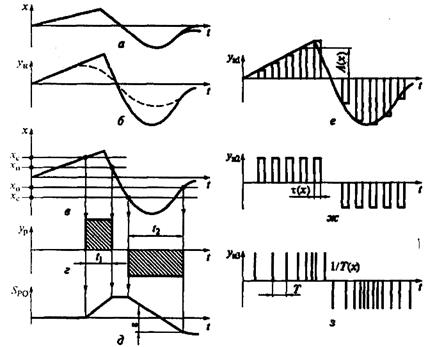
х — входной сигнал; х0— порог отпускания реле; хс— порог срабатывания реле; Sро — перемещение регулирующего органа; t1, t2— время срабатывания реле в прямом и обратном направлении; А(х), τ(х), Т(х)— амплитуда, длительность и период повторения импульсов; ун, ур, уи1- уи3— выходные сигналы
Рисунок 5.12 – Виды регулирующих воздействий в системах непрерывного (а, б), релейного (в-д) и импульсного (е-з) регулирования
Большую группу составляют системы прерывистого регулирования, или дискретные, в которых связи между элементами сохраняются не всегда. Такие системы содержат элемент, который при непрерывном изменении сигнала на входе передаст его дальше прерывисто. В зависимости от принципа преобразования (квантования) сигнала из непрерывного в дискретный — по уровню, по времени или по уровню и времени одновременно — их делят на системы релейного, импульсного и цифрового регулирования.
В систему релейного регулирования входит релейный элемент (реле), имеющий разрывную (релейную) статическую характеристику.
При наличии реле в системе регулирующее воздействие у на ее выходе в зависимости от входной величины может принимать два или три постоянных значения: уmах; уminили уmах, 0; ymin.
Моменты включения и выключения исполнительного элемента в релейной системе зависят от входного воздействия. Если, например, оно изменяется так, как показано на рисунок 5.12, в,то при условии, что цепь управления двигателем разорвана и, следовательно, отработки ошибки не происходит, подаваемое регулирующее воздействие на двигателе изменяется по разрывной ступенчатой функции yp(t)(рисунок 5.12, г). Разрывность объясняется зоной нечувствительности релейного элемента, которая распространяется от +х0, до - х0.
На рисунок 5.12, дпоказан характер перемещения РО SPО(t) в предположении, что при включенном исполнительном элементе (например, электродвигателе) РО перемещается с постоянной скоростью, а в зоне нечувствительности, когда исполнительный элемент выключен, остается неподвижным. При этом, если время включения исполнительного элемента в обратном направлении больше, чем в прямом, т.е. t2>t1, то по окончании процесса регулирования РО занимает новое положение, отличающееся на величину ε от исходного.
Релейные системы разделяют на двухпозиционные и трехпозиционные в зависимости от числа возможных положений РО.
Достоинства релейных систем — простота их конструкции и легкость получения большого коэффициента усиления.
В качестве примера рассмотрим релейную систему, предназначенную для регулирования напряжения на дуге при аргонодуговой сварке неплавящимся электродом путем изменения ее длины (известно, что напряжение на дуге пропорционально ее длине (рисунок 5.13)). В системе используется включенное на выходе усилителя поляризованное реле, которое реагирует на изменение полярности входного воздействия изменением знака выходного сигнала. По достижении отклонения регулируемой величины от задаваемого на данный момент времени Uд=Uд-Uэ, равного напряжению срабатывания реле kyΔUд(где kу— коэффициент усиления усилителя), реле срабатывает в одном или другом направлении (в зависимости от знака рассогласования) и замыкает в цепи якоря двигателя контакт «в» (вверх) или «н» (вниз). В зависимости от того, какой из контактов оказался замкнутым, двигатель возбуждается от обмотки ОВ1 или ОВ2. В результате двигатель через понижающий редуктор поднимает или опускает сварочную головку с постоянной номинальной скоростью, так как UB=const, несмотря на то, что отклонение ΔUдне остается неизменным.
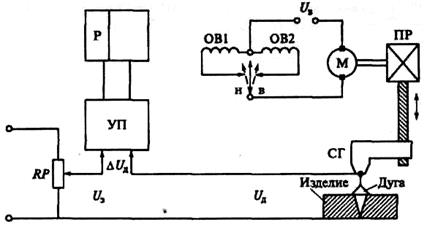
Р – реле; ПР – понижающий редуктор; н, в – контакты в цепи якоря двигателя М; Uв — напряжение питания якорной цепи двигателя;
Рисунок 5.13 – Система релейного регулирования напряжения (длины) сварочной дуги
При отработке ошибки наступает момент, когда kyΔUд<Ucp, реле отключает двигатель, но движение продолжается. Положение равновесия система по инерции может проскочить настолько, что возникнет ошибка обратного знака, достаточная для включения двигателя на обратный ход, причем и далее процесс проскакивания может повторяться. Поэтому, хотя релейные системы и обладают достаточным быстродействием (исполнительный элемент их всегда работает только на максимальной скорости) и относительно просты конструктивно, они имеют и существенные недостатки — пониженную точность регулирования и наличие автоколебаний (незатухающих колебаний около положения равновесия). Для подавления автоколебаний используют различные методы управления.
При квантовании сигнала по времени воздействие на исполнительный элемент происходит в определенные фиксированные моменты времени и отсутствует в промежутках между ними. Такой сигнал называют дискретным по времени. Управляющее воздействие на исполнительный элемент в системе с квантованием по времени представляет собой цепочку импульсов, формируемых импульсным преобразователем, систему называют импульсной.
Только один из параметров импульса (амплитуда А, длительность τ или частота (период Т их повторения f) является функцией входного сигнала, а другие два остаются постоянными. В соответствии с этим различают амплитудно-импульсный (А=var, τ=const, f=const) (рисунок 5.12, е),широтно-импульсный (τ=var, А=const, f=const) (рисунок. 5.19, ж)и частотно-импульсный (f=var, А=const, τ=const) (рисунок 5.12, з)методы регулирования.
Получают распространение комбинированные САР, представляющие собой сочетание регуляторов непрерывного и дискретного действия. В дискретных системах не только входные сигналы вводятся дискретно, но и выходные переменные также могут иметь дискретный характер. В системах со сложной программой реализуемых математических и логических операций обычно применяют цифровые устройства и цифровые вычислительные машины совместно с преобразователями непрерывных (аналоговых) сигналов в цифровые (АЦП) и наоборот — цифровых сигналов в аналоговые (ЦАП). В других случаях дискретное управление применяют специально для повышения помехозащищенности систем.
При квантовании по времени и амплитуде сигнал выражается в виде кода. Дискретные системы с таким характером управляющего воздействия называют цифровыми. В цифровой системе заданный параметр вводится с магнитных лент, клавиатуры или дискет. Фактический контролируемый параметр в аналоговом виде (непрерывном) также преобразуется в цифровую форму с помощью АЦП. Сравнивающее устройство в цифровой системе сравнивает фактическое и заданное значения в виде кодов. Цифровые системы используют в основном для программного управления положением и перемещением рабочих органов оборудования (величины и скорости рабочих ходов, последовательности перемещений рабочих органов, изменения электрических параметров режима и т.п.). Цифровые регуляторы весьма перспективны, так как характеризуются повышенной точностью, быстродействием и гибкостью в сочетании с выполнением ими логических операций; основной их недостаток — сложность отдельных узлов.
Дата добавления: 2022-05-27; просмотров: 275;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
