Системы автоматического регулирования
4.1. Назначение и классификация САР
Системы автоматического регулирования (САР) - замкнутые о системы. Они предназначены для регулирования скорости (поддержания её неизменной при колебании механической нагрузки) электродвигателя.
Механические характеристики ДПТ независимого или параллельного возбуждения жёсткие. При измерении нагрузки они обеспечивают изменение скорости на 5-10%. Этой жёсткости недостаточно для таких производственных машин как прокатные станы, бумагоделательные машины и т.п.
Для поддержания скорости неизменённой применяют обратные связи: измеряют при помощи датчиков контролируемый параметр, сравнивают его с заданным и при появлении разности измеренной величины и заданной, устраняют это отклонение.
Замкнутые САР состоят из преобразователя П (обычно тиристорный выпрямитель), электродвигателя постоянного тока независимого возбуждения М, датчика Д, преобразующего измеряемую величину (скорость, ускорение, напряжение, ток) в удобную для сравнения преобразования, усилителя У, задатчика ЗД, узла сравнения УС и регулятора Р (рисунок 4.1.)
При стабильной работе заданная скорость электродвигателя поддерживается разностью U - Uoc. При изменении нагрузки меняется величина Uoc, что приводит к разбалансу напряжений на входе узла сравнения. Регулятор Р исправляет эту ошибку.
В зависимости от принятого закона регулирования различают статические, астатические и изодромные системы регулирования.
В статическом регуляторе регулирующие: воздействие возникает при отклонении регулируемой величины от заданного значения. Поэтому статический регулятор работает с остаточным отклонением называемым статизмом и не может обеспечить строгого равенства между действительным и заданном значениями регулируемой величины.
В астатических системах величина регулирующего воздействия зависит не от абсолютного отклонения регулируемой величины от заданной, а от скорости её изменения. Поэтому в установившемся режима регулирующее воздействие неизменного.
В изодромных регуляторах сочетаются элементы статического и астатического регуляторов. В таких системах при возникновении отклонения регулируемой величины от заданного значения регулятор сначала работает как статический, а в конце как астатический.
Как уже отмечалось выше, воздействие выходной величины на входную в замкнутых САР осуществляется по каналу обратной связи, который формируется датчиком, усилителем и узлом сравнения. Обратные связи могут быть: одно – и многопетлевыми (в зависимости от количества каналов ОС); положительными и отрицательными ( в зависимости от характера воздействия выходной величины на входную); по току, напряжению, мощности, скорости, ускорению и т.д. (в зависимости от вида контролируемой величины); жёсткими и гибкими.
Положительные ОС увеличивают входную величину, отрицательные –уменьшают её. Жёсткие ОС действуют во всех режимах работы ЭП (в переходном и установившемся). Гибкие ОС действуют только, как правило, в переходных режимах или задерживаются, пока не насупит аварийный режим (отсечки по току или напряжению).
4.2. Статические и динамические характерисики замкнутых САР П-Д
 Замкнутые САР образуют системы "преобразователь-двигатель" (П-Д). Преобразователь переменного тока в постоянный питает якорь двигателя постоянного тока независимого возбуждения. Если изменять напряжение на зажимах якоря ДПТ, то получим семейство характеристик Р (рис.4.2). При замыкании системы получим более жёсткую характеристику «3». Она состоит из двух участков. Участка 1, на котором стабилизируется скорость электродвигателя, и участка 2, на котором ограничивается величина максимального тока.
Замкнутые САР образуют системы "преобразователь-двигатель" (П-Д). Преобразователь переменного тока в постоянный питает якорь двигателя постоянного тока независимого возбуждения. Если изменять напряжение на зажимах якоря ДПТ, то получим семейство характеристик Р (рис.4.2). При замыкании системы получим более жёсткую характеристику «3». Она состоит из двух участков. Участка 1, на котором стабилизируется скорость электродвигателя, и участка 2, на котором ограничивается величина максимального тока.
Статическая механическая характеристика замкнутой системы 8, типичная для многих замкнутых систем. Она представляет зависимость скорости двигателя от развиваемого момента М при использовании различных регулирующих обратных связей.
Различают возмущающее и регулирующее воздействие в замкнутых системах. Возмущающим воздействием называют причину, вызывающую изменение регулируемой величины. Это может быть напряжение питающей сети. Момент нагрузки и пр.
Регулирующие воздействие определяется соотношением задающей величины обратной связи. Если обратная связь отсутствует и нет нагрузки на электродвигатель работает в режиме идеального х.х. со скоростью ωз Приналичии возмущающего воздействия Ма и Ос Двигатель работает в точке а) Если изменение возмущающие воздействий до значения Мб то двигатель перейдёт в точку б). Этот режим можно прлучитъ в замкнутой системе изменением величины 0107 , а в разомкнутой изменением напряжения на якоре двигателя вручную.
На участке 2 регулирующее воздействие ток якоря (электромагнитный момент двигателя), а возмущающее - скорость двигателя.
Приведённая на рисунке 4.2 характеристика "3" отвечает случаю, когда на обоих её участках система регулирования, изменяя структуру, остаётся статической системой. Такие системы характеризуются понятием с т а т и з м а.
Статизмом называют отношение разности заданного установившегося значения регулируемой величины и установившегося значения регулируемой величины, определяемой возмущающем воздействием к заданному значению регулируемой величины:
S=(ωg – ωa)/ ωg 4.1
Статиям может быть выражен, как сумма статизма по заданию и статизма по возмущению:
S=Sg + Sl=(ωg – ωo)/ ωg + ( ωg – ωa)/ ωg 4.2
Статизм системы зависит от её параметров и, в первую очередь, от коэффициента передачи разомкнутой системы регулирования.
В системах астатических статизм равен нулю.
Динамические характеристики замкнутых систем отражают поведение их во время переходных процессов пуска, торможения и регулирования скорости, т.е. при изменениях задающего или возмущающего воздействия. Они представляют собой графики изменения во времени регулируемых величин: ω =f(t),
M=f(t) и т.п.
Оценка, качества системы по виду кривой переходного процесса производится по показателям качества: быстродействию, перерегулированию и числу колебаний.
Быстродействие системы оценивается временем переходного процесса, когда истинное значение регулируемой величины отличается от заданного не более чем на 3-5%.
 В электроприводах, работающих в основном в переходных режимах пуска и торможения (реверсивные прокатные станы), увеличение быстродействия способствует повышению производительности рабочих машин. В системах следящего и программного управления повышается точность отработки линейных и угловых перемещений. В системах стабилизации скорости снижаются динамические ошибки. Однако быстродействие системы ограничивается перегрузочной способностью двигателя, предельными моментами механической части (величинами ускорений и ударов, допускаемыми конструкцией механизмов).
В электроприводах, работающих в основном в переходных режимах пуска и торможения (реверсивные прокатные станы), увеличение быстродействия способствует повышению производительности рабочих машин. В системах следящего и программного управления повышается точность отработки линейных и угловых перемещений. В системах стабилизации скорости снижаются динамические ошибки. Однако быстродействие системы ограничивается перегрузочной способностью двигателя, предельными моментами механической части (величинами ускорений и ударов, допускаемыми конструкцией механизмов).
Перерегулированием называют отношение разности между приращениями максимального и установившегося значения регулируемой величины к приращению её установившегося значения. Перерегулирование обычно выражается в %.
σ = [(ωмах - ωy /∆ω] 100% 4.3
Перерегулирование не должно превышать заранее заданного значения (обычно 15%). Число колебаний регулируемой величины за время tn, т.е. число переходов этой величины через установившееся значение определяет степень демпфирования (затухания) колебаний в системе. Как правило, их должно быть не более трёх.
4.3. Элементы управляющих устройств замкнутых автоматических
систем управления ЭП
В управляющих устройствах замкнутых АСУЭП можно выделить четыре основные группы управляющих элементов. К первой группе относят датчики и из -мерительные схемы. При помощи таких элементов получают электрические сигналы, пропорциональные электрическим и механическим величинам, которые
необходимо контролировать (напряжение, ток, скорость, момент, угловое перемещение, ускорение и т.д.)
Ко втором группе относят усилители, предназначенные для увеличения мощности сигналов датчиков и измерительных схем. Их используют как выходные усилительные элементы управляющих устройств и как промежуточные суммирующие или фазочувствительные элементы.
Третью группу составляют управляющие элементы, при помощи которых формируются требуемые законы управления. Это - пассивные и активные корректирующие элементы (операционные усилители, функциональные преобразователи, вычислительные устройства и т.п.)
Четвёртую группу образуют командные элементы, посредством которых в систему управления вводят сигналы, задающие значение или закон изменения регулируемой величины.
Исполнение элементов, как по конструкции, так и по принципу действия может быть раз личным. Однако в последнее время в электроприводах используют типовые элементы унифицированной блочной системы регуляторов на аналоговых или дискретных элементов УБСР-АИ и УБСР-ДИ.
Элементы УЗСР выполняются в виде двухсторонних - печатных плат, снабжённых штепсельным разъёмом, на которых размещены полупроводниковые и гибридные интегральные микросхемы и радиодетали. Они являются наименьшими сменными модулями СУ.
В номенклатуру УБСР входят источники питания, задатчики входных сигналов, датчики регулируемых параметров, усилительные устройства регуляторы, потенциальные разделители, компараторы, функциональные устройства, устройства защиты и коммутации, устройства технологической логики, контролирующие и вспомогательные устройства.
Номенклатура и основные технические данные УБСР приведены в приложении.
4.4. Принципы и условные обозначения узлов систем управления
Схемы систем управления, построенные на УБСР сложны для чтения понимания. Их представляют на чертежах в виде печатных плат и схем внешних соединений. По таким схемам легко разобрать конструкцию схемы. На них представлены все элементы и их соединения. Элементы на них изображают в обще приятном стандарте условных обозначений на электрических схемах. (ГОСТ 2.722-68, 2.743 – 72, 2.756 – 76 и др.) Для понимания функций и значения узлов и блоков применяют структурные схемы.
При описании структурных схем используют условные различные обозначения. Например, каждый узел изображается прямоугольником с указанием передаточной функции этого узла. Такое обозначение удобно, если схема используется для расчёта динамических характеристик СУ. Другим общепринятым изображением является изображение узла прямоугольником, в котором указывается передаточная характеристика. При такой системе условных
обозначений легко понять общие принципы работы СУ, но схемы самих узлов остаются нераскрытыми. Возможно, также изображать структурные схемы состоящими из операционных усилителей и элементов их прямых и обратных связей. Такие схемы приближаются к принципиальным, поэтому становятся громоздкими.
Чаще всего применяют комбинированный метод изображения структурных схем, при котором основной узел изображается состоящим из образующих его ОУ с их ОС. В прямоугольнике указывается в условных обозначениях наименование узла:
4.5. Типовые звенья САР. Их Характеристики
Любое устройство автоматического регулирования можно представить в виде совокупности простейших составных частей – звеньев, каждое из которых обладает определённым характером поведения в статическом и динамическом режиме работы.
Важными показателями статического режима функционального элемента Сар является его статическая характеристика, выражаемая зависимостью выходной величины от выходной. У =f(x).
Статические характеристики могут быть линейными нелинейными. Отношение выходной величины к входной для линейных характеристик или отношение приращения выходной к приращению выходной называют коэффициентом передачи элемента:
К = у/х – для линейных и К = dУ/ dХ – для нелинейных элементов.
Если входной элемент САР постоянный, то и выходной сохраняет постоянное значение.
В реальных САР сигналы, как правило, переменные. На изменение входной величины элементы САР реагируют по разному. Всё разнообразие этой реакции можно обратить в несколько групп. Элементы будем называть звеньями, Uк будем характеризовать динамическими характеристиками. Динамические характеристики звеньев описываются дифференциальными уравнениями. Дифференциальными уравнениями обычно записывают в операторной форме, заменяя дифференциал d/t оператором «Р»
Звенья характеризуют передатольнами функциями.
Передаточной функцией называют отношение мгновенных значений выходного сигнала к мгновенному значению входного сигнала.
В операторной форме: W (p) = у/x 4.4.
В зависимости от характера переходного процесса различают безинерционнные, апериодические, диффериннцирующие, интегрирующие звенья.
Безинерционным звеном называют звено, в котором выходной сигнал пропорционален выходному х:
У=кх, передаточная функция: W(p)=к.
Где к – коэффициент передачи (усиления).
Апериодическим звеном называют звено, в котором при скачкообразном изменении входной величины выходная изменяется по экспоненцианальному закону.
Передаточная функция имеед вид:
W(p) = к/Тр+1 4.5.
Дифференцирующим звеном называют звено, в котором сигнал на выходе изменяется пропорциональное звено первого порядка):
W(p) = кTp/Тp + 1 4.6.
Интегрирующим называют звено, в котором выходной сигнал пропорционален интегралу по времени от входного сигнала:
W(p) = к/p 4.7
Колебательным называют звено, кв котором при скачкообразном измерении входной величины выходной сигнал стремиться к своему новому установившемуся значению, совершая затухающие колебания:
W (p) = к/T2p2 + 2 σTp + 1 4.8.
Где W(p) – передаточная функция;
Р = d/dt – оператор;
К – коэффициент усиления (передачи);
T – постоянная времени переходного процесс tпп можно выразить через постоянную по формуле tпп = (3 – 4)Т
σ – коэффициент затухания
Передаточными функциями характеризуют как замкнутые, так и разомкнутые системы. Их записывают как для одного так и для нескольких последовательно и параллельно включённых звеньев или системы в целом.
При анализе устойчивости САР применяют частотные методы, исследующие поведение систем при подаче на выход звена синусоидального сигнала.
4.6. Датчики и измерительные схемы
Для получения электрического сигнала, пропорционального скорости, току, напряжению электродвигателя в САР необходимо поменять различные датчики.
Датчики скорости. Скорость электродвигателя можно изменить непосредственно при помощи тахогенераторов или косвенно при помощи тахометрических мостов. Применяют тахогенераторы постоянного и переменного тока (ТГ).
Наибольшее распространение получил и тахогенераторы постоянного тока, так как АСУЭП имеют вход на постоянном токе и приборы для измерения скорости требуют питания постоянным током. Тахогенераторы могут быть с постоянными магнитами так и с обмоткой возбуждения. В различное время нашей промышленностью выпускались и широко использовались датчики типов МЭТ8, ЭТ4 для изменения скорости до 2000 об/мин, ДСУ-1 – для измерения скорости и ускорения до 200 об/мин.
В настоящее время в тиристорных ЭП широко стали применять бесконтактные датчики ПКФ12 – 1 (кодовый фотоэлектрический датчик положения) и ПДФ-1. Датчик ПКФ12-1 контролирует угол поворота вала исполнительного органа рабочей машины или электродвигателя и выдаёт выходные сигналы в цифровом коде, пропорциональные углу поворота он представляет собой стеклянный 12- разрядный кодовый диск, помещённый на валу, на котором чередуются оптически прозрачные и непрозрачные участки. С одной стороны диска помещено 12 источников света, а напротив, с другой стороны диска 12 приёмников света. При освещении приёмника на его выходе возникает сигнал логической 1, который усиливается и передаётся на выход датчика; при затемнении - сигнал логического нуля. Полная цифровая ёмкость 12 зарядов 4096 единиц. Комбинация электрических сигналов на выходе датчика однозначно определяет положение кодового диска, а скорость изменения кода- скорость вращения.
Датчик ПДФ -1 контролирует угол поворота вала и скорость исполнительного сигнала РМ или двигателя.
Он выдаёт выходное напряжение пропорциональное углу поворота в виде частоты следования импульсов. Он препятствует в виде частоты следования импульсов, представляет модуляционные металлический диск со 150 прорезями, помещённый на вал. С одной стороны помещают 2 источника света, с другой 2 – приёмника. Таким образом, схема имеет 2 канала сдвинутых на 90о
 Тахометрические мосты применяют вместо тахогенераторов в качестве датчиков скорости (рис 4.4.) В одно из плеч тахомоста включён якорь двигателя, имеющий сопротивление Rя, другие плечи образованы сопротивлением обмотки дополнительных полюсов Rдп и потенциометром R1+R2. Конденсатор Сф вместе с сопротивлениями схемы образует фильтр.
Тахометрические мосты применяют вместо тахогенераторов в качестве датчиков скорости (рис 4.4.) В одно из плеч тахомоста включён якорь двигателя, имеющий сопротивление Rя, другие плечи образованы сопротивлением обмотки дополнительных полюсов Rдп и потенциометром R1+R2. Конденсатор Сф вместе с сопротивлениями схемы образует фильтр.
Если мост уравновешен и схема работает в установившемся режиме, то:
R2Rдп = R1Rя 4.9
Uвых = [Rдп/(Rя +Rдп)]Ея 4.10
Если Ф постоянен, то Uвых = ктм * ω 4.11.
Где: Ктм = Rдп/(Rя + Rдп) Ке = Ктм/Ке 4.12.
Тахометрический мост – апериодическое звено, по этому его передаточная функция.
W(p) = Kтм/Тфp + 1 4.13.
где: Тф = Сф (R1R2 / R1+ R2) 4.14.
 2. Датчики напряжения и тока. В системах постоянного тока датчики напряжения представляют собой потенциометры, а датчики только – шунты, в качестве которых часто используют обмотки дополнительных полюсов их компенсационные обмотки электрических машин постоянного тока. Как потенциометры, так и шунты не обеспечивают гальваническую развязку цепей управления от силовых цепей. Кроме того, шунты нельзя применять для измерения тока более 1000А. Для потенциального разделения цепей измеряемой величины и выхода датчика, а так же для усиления сигнала элементарного датчика, применяют датчики, построенные по принципу МУД (модулятор – усилитель – демодулятор), в котором измеряемую величину постоянного тока модулируют сигналом переменного тока, усиливают, а затем демодулируют.
2. Датчики напряжения и тока. В системах постоянного тока датчики напряжения представляют собой потенциометры, а датчики только – шунты, в качестве которых часто используют обмотки дополнительных полюсов их компенсационные обмотки электрических машин постоянного тока. Как потенциометры, так и шунты не обеспечивают гальваническую развязку цепей управления от силовых цепей. Кроме того, шунты нельзя применять для измерения тока более 1000А. Для потенциального разделения цепей измеряемой величины и выхода датчика, а так же для усиления сигнала элементарного датчика, применяют датчики, построенные по принципу МУД (модулятор – усилитель – демодулятор), в котором измеряемую величину постоянного тока модулируют сигналом переменного тока, усиливают, а затем демодулируют.
Для измерения больших токов применяют измерительные трансформаторы постоянного тока и датчики тока с элементами Холла.
Трансформаторы постоянного тока представляют собой дроссели насыщения, рабочей обмотки которых включены на напряжение источника переменного тока, а подмагничивающие (управляющие) обмотки – последовательно с измеряемой цепью (рис 4.5.) Напряжение снимаемое с резистора Rn, оказывается пропорциональным току цепи I1.
Измерение тока с помощью элементов Холла основана на измерении магнитной индукции, создаваемой токопроводом при прохождении измеряемого тока.
ЭДС Холла является функцией произведения тока управления Iу и магнитной индукции В, пронизывающая полупроводниковый кристалл в направлении, перпендикулярном его плоскости (рис 4.6.)
Ех = (К1*B) / У 4.15
Где: К – коэффициент, учитывающий физические свойства полупроводникового материала.
 При стабилизированном токе управления Iу с помощью датчика Холла получают линейную зависимость Е = f(В). Датчики Холла ДХ (катушки с сердечниками из полупроводникового материала) устанавливают в воздушный зазор магнитопровода, который концентрирует магнитные поля.
При стабилизированном токе управления Iу с помощью датчика Холла получают линейную зависимость Е = f(В). Датчики Холла ДХ (катушки с сердечниками из полупроводникового материала) устанавливают в воздушный зазор магнитопровода, который концентрирует магнитные поля.
Датчики тока в системах электроприводов с тиристорными преобразователями
можно включать в цепь переменного тока через Тр тока. Ток вторичных обмоток т.т. суммируется, выпрямляется и выделяется на нагрузочном резисторе (рис.4.7.)
 3.Датчики динамического тока (ускорения). В системах электроприводов постоянного тока при работе двигателя с неизменным магнитным потоком динамическая составляющая тока якоря:
3.Датчики динамического тока (ускорения). В системах электроприводов постоянного тока при работе двигателя с неизменным магнитным потоком динамическая составляющая тока якоря:
iяд = JKд(dω/dt) = Срω 4.16.
где: J - момент инерции;
Кд - коэффициент пропорциональности;
р - оператор.
 Простейшим датчиком динамического тока, т.е. датчиком ускорения привода может быть дифференцирующая цепочка RС, включаемая на выход тахогенератора или на напряжение двигателя (рис.4.8).Переда точная функция узла с тахогенератором:
Простейшим датчиком динамического тока, т.е. датчиком ускорения привода может быть дифференцирующая цепочка RС, включаемая на выход тахогенератора или на напряжение двигателя (рис.4.8).Переда точная функция узла с тахогенератором:
W(p) = Kтг * Тр / Тр + 1 4.17.
4.7. Усилительные элементы
Для усиления электрических сигналов снимаемых с датчиков с других элементов САР, можно применять магнитные усилители, электромашинные усилители с поперечным полем и полупроводниковые (транзисторные) усилители. Магнитные усилители применяют главным образом как промежуточные суммирующие усилители, когда необходима гальваническая развязка цепей управления и силовых цепей. Как элемент системы управления МУ является сложным нелинейным импульсным звеном. При некоторых частных условиях его работы МУ можно рассматривать как непрерывное апериодическое звено с чистым запаздыванием. Для повышения быстродействия МУ питают напряжением повышенной частоты 400 - 1000 Гц. В качестве источника повышенной частоты применяют преобразователи постоянного напряжения в переменное прямоугольной формы (мультивибраторы с магнитной связью).
Электромашинный усилитель с поперечным полем (ЭМУ), как это известно из курса электрических машин, представляет собой агрегат, состоящий из гонного АД с КЗР и генератора постоянного тока с четырьмя щётками, две из которых установлены на нейтрале основного магнитного потока, и закорочены, а две другие на нейтрале поперечного поля, возникшего при протекании тока через замкнутую цепь первые двух щёток. Напряженно снимается с последних двух щёток (рис.4.9.)
 Для компенсации реакции якоря от тока нагрузки по продольной оси на статоре располагается распределённая компенсационная обмотка КО, МДС которой регулируют при помощи шунтирующего сопротивления Rш. По продольной оси машины для улучшения её коммутации расположены обмотки дополнительных полюсов ДП. ЭМУ серии ЭМУ-А снабжены специальными размагничивающими обмотками переменного тока и последовательной ОВ в поперечной цепи статора.
Для компенсации реакции якоря от тока нагрузки по продольной оси на статоре располагается распределённая компенсационная обмотка КО, МДС которой регулируют при помощи шунтирующего сопротивления Rш. По продольной оси машины для улучшения её коммутации расположены обмотки дополнительных полюсов ДП. ЭМУ серии ЭМУ-А снабжены специальными размагничивающими обмотками переменного тока и последовательной ОВ в поперечной цепи статора.
Благодаря действию этих обмоток значительно уменьшено влияние гистерезиса магнитной цепи и тока нагрузки ЭМУ на его внешние характеристики.
Полупроводниковые усилители, являются основным видом усилителем в современных АСУЭП в качестве промежуточных, суммирующих и управляющих. Наибольшее распространение получили усилители постоянного тока (УНТ). Они выполняются с числом каскадов от 1-4 с непосредственной связью между каскадами, операционные усилители в интегральном исполнении. Для электроприводов с широким диапазоном регулирования скорости до 2000:1 применяют усилители по схемам МДМ (модулятор-усилитель переменного тока - демодулятор).
4.8. Управляющие элементы
Чтобы обеспечить качественную и надевшую работу САР во всех режимах, высокую степень их устойчивости при колебаниях нагрузки, быстрое затухание колебательных процессов в схемы обратных связей вводят различные корректировки, управляющие этими режимами. Их осуществляют при помощи, управляющие элементов. К ним относят пассивные корректирующие элементы, динамические мосты, регуляторы, функциональные преобразователи и вычислительный устройства.
В качество пассивных корректирующих элементов используют различные RC -цепи: дифференцирующие, интегрирующие, интегрально - дифференцирующие (рис. 4.10.)
На рисунке 4.10а) представлена схема и логафмическая амплитудная характеристика замедляющей, (интегрирующей) RC- цепи. На рисунке 4.10б) - схема и логарифмическая амплитудная характеристика форсирующей RC-цепи.
На рис. 4.10в) -схема и интегрально - дифференцирующей цепи.
Интегрирующую цепочку применяют для деформации низкочастотной части ЛАЧХ разомкнутой системы, дифференцирующая – для деформации высокочастотной части ЛАЧХ. Интегрально – дифференцирующие звено изменяет среднечастотную часть ЛАЧХ системы.
Стабилизирующий трансформатор также относят к пассивный корректирующими элементам. Он представляет собой двухобмоточный трансформатор с воздушным зазором в магнитопроводе, величину которого можно регулировать. На первичную обмотку подают входное напряжение, с сопротивления нагрузки снимается сигнал, содержащий первую производную от него.
При включении корректирующих звеньев в систему управления их характеристики искажаются. Для уменьшения искажения необходимо соблюдать условие, чтобы входное сопротивление последующего звена было на порядок больше, а выходное и сопротивление предыдущего звена - на порядок меньше, чем выходное и соответственно, входное сопротивление данного корректирующего звена.
Соответственно регуляторы выполняют на интегральных микросхемах. Выпускают унифицированные блочные системы регуляторов (УБСР). Такие усилители не только выполняют функции усиления сигналов, но и формируют законы управления. Они могут реализовать интегрирование, дифференцирующие, суммирование, изменение масштаба. По этому операционные усилители с сопротивлениями, включаемыми в его входные цепи и цепи обратных связей называют регуляторами. Тип регулятора определяется выполняемой им операцией. Если усилитель во всех режимах только усиливает сигнал (его передаточная функция W(р)=K), то такой регулятор называют пропорциональным (П - регулятором).
Если усилитель только интегрирует входной сигнал, то его называют интегральным (И - регулятором). Если усиливает и интегрирует входную величину, то – пропорционально - интегральным (ПИ – регулятором) Если дифференцирует входную величину, то дифференциальным (Д - регулятором) Если усиливает, интегрирует и дифференцирует входную величину, то – ПИД - регулятором.
На рисунке 4.2 а) представлена схема П - регулятора, на рис. 4.2 б) И -регулятора, на рис. 4.2 в) Д - регулятора; ня рис. 4-2 г) ИП - регулятора; на рис. 4.2 д) ПИ - регулятора и на рис. 4.2 е) схема ПИД - регулятора.
Функциональные преобразователи и вычислительные устройства позволяют, реализовать в устройствах управления квадратичные, кубичные и другие зависимости и производить над величинами операции умножения, деления, возведение в квадрат, извлечение квадратного корня, алгебраическое суммирование и т.д.
Функциональные преобразователи построены на принципе кусочно – линейной аппроксимации монотонных функций при помощи резисторов, диодов и опорных напряжений. Вычислительные устройства построены, как правило, на аналоговых элементах с применением ОУ.
4.9. Командные элементы
К командным элементам относят различные задатчики скорости и интегральности. Задатчики скорости задают величину скорости электродвигателя, которую должна контролировать САР. При помощи его можно менять скорость в широких пределах, осуществлять реверс.
Простейшим задатчиком скорости может служить потенциометр с плавным или ступенчатым изменением задающего напряжения (рис.4.12 а) и б)).
Для повышения точности задания его питают от источника со стабилизированным напряжением питания.
Для приводов постоянного тока с двухтонным регулирование скорости (1 - напряжения на зажимах якоря и 2 – изменением напряжения на зажимах ОВ двигателя) применяют сдвоенныепотонциометры с одной рукояткой или от одного сервододвигателя.
Если в АСУЭП применена обратная связь по напряжению или ЭДС двигателя, то на участке 2 ослабления магнитного потока напряжение задания по цепи якоря Uзя должно оставаться постоянным, соответствующим номинальному напряжению на якоре, а на участке 1 регулированная напряжения на якоре, наоборот, неизменно напряжение задания по цепи возбуждения Uзв, соответствующее номинальному потоку двигателя. Если же АСУЭП имеет обратную связь по скорости, то напряжение Uзя возростать на всём диапазоне регулирования скорости, а ослабление магнитного потока по – прежнему начинается лишь после того, как напряжение на якоре достигнет номинального значения. (На рисунке 4.12 нерегулируемая часть потенциометра закрашена).
Вместо потенциометров со скользящими контактами в электроприводах средней и большой мощности применяют бесконтактные задатчики скорости в виде бесконтактных командоаппаратов (БКА), выполненных на сельсинах (рис.4.13.) или с элементами Холла.
При применении серводвигателей реостатные задатчйки скорости используют и в качестве задатчиков интенсивности.
БКА на сельсинах устроен следующим образом. Обмотку статора сельсина подключают к стабилизированному источнику переменного напряжения. К трёхфазным обмоткам ротора через выпрямитель – конденсатор С и входной трансформатор фазового детектора ФД.
При повороте ротора сельсина рукояткой управления или ножной педалью на угол 90о напряжение на выходах изменяется от нуля до максимума. Параметры ФД выбирают такими, чтобы Uвых2 изменялось от нуля до + Uт .Напряжение Uвых1 используют для изменения напряжения на якоре двигателя, Uвых2 - для управления потоком возбуждения.
БКА с элементами Холла преобразуют механические перемещения ротора в электрические сигналы. Их выпускают с рычажным ручным приводом (КАРХ), с педальным ножным приводом. (КАПХ) и с маковичным ручным приводом со стрелкой - указателем и шкалой (КАЗХ).
Все они имеют ротор - цилиндрический постоянный - магнит, насаженный на вал из немагнитного материала; магнитопровод - магнитопроводящие пластины чередуются с магнитопроводящими; элементы Холла, катушки с сердечниками из полупроводникового материала, расположенные между полюсами магнитопровода. Катушки питаются от стабилизированного источника постоянного тока. На выходе двухкаскадного усилителя формируется сигнал
Uвых = Ф (магнитному потоку, зависящему от угла поворота ротора).
4.10. Стабилизация скорости электроприводов
Как уже отмечалось в 4.1, для стабилизации скорости электродвигателей постоянного тока параллельного возбуждения в системах "Преобразователь-двигатель (П-Д) применяют обратные связи. В установившемся режиме основным показателем работы системы стабилизации скорости служит точность поддержания постоянства заданной скорости при воздействии на систему различных возмущений (измерение Мс, напряжение питающей сети, температуры ОВМ и т.п.). Точность системы определяется перепадом скорости  при изменении Мс заданных пределах, т.е. жёсткостью или статизмом механических характеристик. В зависимости от требований к точности стабилизации скорости и диапазона регулирования D=
при изменении Мс заданных пределах, т.е. жёсткостью или статизмом механических характеристик. В зависимости от требований к точности стабилизации скорости и диапазона регулирования D=  /
/ 
 применяют различные варианты обратных связей. Если не требуется большой жёсткости характеристик при небольшом диапазоне регулирования, то применяют простейшие ОС по напряжению. По мере увеличения диапазона регулирования требования к жёсткости характеристик возрастают.
применяют различные варианты обратных связей. Если не требуется большой жёсткости характеристик при небольшом диапазоне регулирования, то применяют простейшие ОС по напряжению. По мере увеличения диапазона регулирования требования к жёсткости характеристик возрастают.
Статизм характеристик замкнутой САР будет наибольшим для нижних характеристик:
Sx.з.мах=  =(
=(  )*D (4.18)
)*D (4.18)
Таким образом при заданном статизме Sx.з.мах управление диапазона D можно обеспечить только путём соответствующего уменьшения перепада скорости.
Требования к переходным режимам систем стабилизации скорости также были рассмотрены в 4.1 (быстродействие, перерегулирование и число колебаний). Качество системы необходимо рассматривать какпри изменении задающего воздействия, так и при набросе или сбросе нагрузки. Для обеспечения желаемого результата применяют корректирующие обратные связи или последовательную коррекцию в частности многоконтурную систему подчинённого регулирования.
 Рассмотрим характеристики различных замкнутых CAP.
Рассмотрим характеристики различных замкнутых CAP.
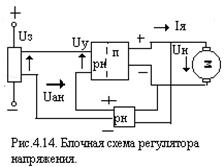
1. Схема с обратной связью по напряжению (Рис.4.14.)
напряжение управления регулятором напряжения РН ; Uз -задающее напряжение; Uосн -напряжение обратной связи; Еп -ЭДС преобразователя; Uп напряжение на зажимах двигателя ;Kи=Еп/Uуп - коэффициент усиления преобразователя; Кн=Uосн/Uп - коэффициент ОС по напряжению; Rп -сопротивление силовой цепи преобразователя. Тогда можно записать на основе законов равновесия:
(4.19)
Решив систему уравнений относительно Uп получим:
 (4.20)
(4.20)
Как видно обратная связь по напряжению действует как своеобразная комбинационная связь отрицательная по ЭДС и положительная по току нагрузки:
Еп=(Uз+IяRпКн)/(1+КнКп) (4.21)
ЭДС преобразователя растёт с увеличением нагрузки за счёт положительной ОС по току.
Падение напряжения в замкнутой системе  Unз при одинаковых нагрузках уменьшается в 1+Кн+Кп раз по сравнению с падением напряжения Unо в разомкнутой системе. Следовательно, жёсткость характеристик повышается и тем самым обеспечивает поддержание постоянства напряжения на зажимах двигателя, но с ошибкой определяемой статизмом Sхз внешней характеристики преобразователя, так как система статическая:
Unз при одинаковых нагрузках уменьшается в 1+Кн+Кп раз по сравнению с падением напряжения Unо в разомкнутой системе. Следовательно, жёсткость характеристик повышается и тем самым обеспечивает поддержание постоянства напряжения на зажимах двигателя, но с ошибкой определяемой статизмом Sхз внешней характеристики преобразователя, так как система статическая:
Sхз=  =[
=[  ]/(1+КпКн) (4.22)
]/(1+КпКн) (4.22)
Как видно, статизм (относительная ошибка регулирования замкнутой системы) зависит от коэффициента усиления преобразователя и коэффициента ОС.
Если возникает необходимость регулирования напряжения в диапазоне, что осуществляется изменением задающего напряжения, то чем глубже D, тем больше относительная ошибка.
Преобразователь с регулятором напряжения представляет собой инерционное звено, двигатель колебательное. Поэтому в начальный период пуска разгон двигателя производится как в разомкнутой системе (скорость нарастает, приближаясь к установившейся). При приближении к заданному значению за счёт положительной ОС по току возникает перерегулирование. Начальная стадия ускоряется, окончание затягивается, так как ПОС по току ухудшает демпфирование системы.
2 Схема с отрицательной ОС по скорости (рис.4.15)
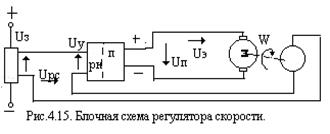 В качестве датчика скорости ДС может быть использован тахогениратор или тахометрический мост. В общем случае входным каскадом преобразователя П служит промежуточный усилитель регулятор скорости РС. Применяя те же допущения и обозначения, что и в предыдущем случае и поланая магнитный поток двигателя постоянным, вводя понятие коэффициента двигателя Кд, запишем систему уравнений:
В качестве датчика скорости ДС может быть использован тахогениратор или тахометрический мост. В общем случае входным каскадом преобразователя П служит промежуточный усилитель регулятор скорости РС. Применяя те же допущения и обозначения, что и в предыдущем случае и поланая магнитный поток двигателя постоянным, вводя понятие коэффициента двигателя Кд, запишем систему уравнений:  (4.22.)
(4.22.)
Решая систему уравнений относительно скорости получим: Дата добавления: 2019-09-30; просмотров: 475; =UзКпКд/(1+КсКпКд)-Iя
=UзКпКд/(1+КсКпКд)-Iя
<== предыдущая лекция
|
следующая лекция ==>
Расчет балок из хрупких материалов | Структура таблицы БД и типы данных
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
