Структурные элементы механизмов
Механизм представляет собой связанную систему тел - частей механизма, движущихся как единое целое. Каждое такое тело называют звеном.
В зависимости от конструкции звено может быть простым, т.е. выполненным без применения сборочных операций, или сложным (составным). В таком случае простое звено и отдельные элементы сложного звена называют деталями.
Кривошип - звено, совершающее полнооборотное вращение вокруг неподвижной оси.
Коромысло -при неполнооборотном вращении.
Ползун - звено, движущееся возвратно-поступательно.
Шатун – звено, совершающее плоскопараллельные движения.
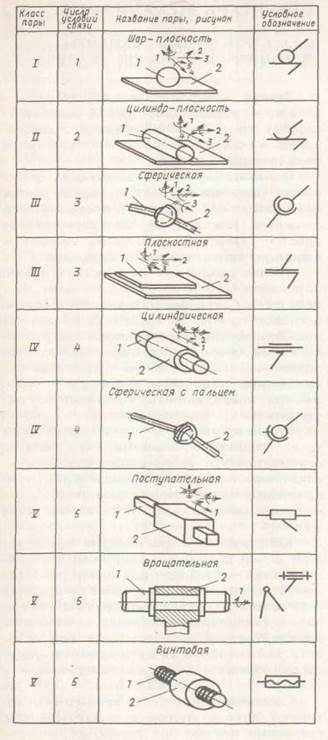
Формирование механизма, т.е. соединение отдельных его частей, осуществляется с помощью кинематических пар (таблица 1)- соединений (сопряжений) двух соприкасающихся звеньев, допускающих их относительное движение.
Конструктивно любая пара представляет собой подвижное сопряжение соединительных частей звеньев, в котором «силовой поток» от одного звена к другому передается за счет геометрического замыкания (запирания, например, с помощью дополнительной детали — оси) или силового замыкания (прижатия силами упругости, тяжести, рабочими нагрузками и т.д.).
Соединительные части звеньев контактируют друг с другом в ненагруженном состоянии в точке, по линии, по поверхности - элементах контакта звеньев.
По характеру соприкосновения элементов пары подразделяют на низшие (звенья между собой контактируют по поверхности) и высшие (звенья контактируют по линиям или в точках).
Высшие пары имеют меньшие потери на трение и компактную конструкцию.
|
Таблица 2.1 – Классификация кинематических пар
Низшие пары обладают большей нагрузочной способностью.
По числу наложенных условий связи Н (или степеней подвижности S) на относительные движения звеньев кинематические пары по предложению акад. И.И. Артоболевского делят на классы.
Для свободного тела в пространстве число степеней подвижности равно 6, а Н и S связаны соотношением: Н = S - 5, где S изменяется от 1 до 5. При S = 6 кинематическая пара становится жестким соединением (звеном), а при S = 0 кинематической пары не существует, а два звена движутся независимо друг от друга в пространстве.
При S = 1 кинематические пары имеют пять степеней подвижности (пятиподвижные), при S = 2 - четыре степени подвижности (четырехподвижные) и т.д.
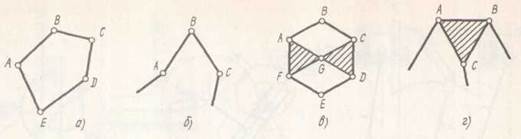 |
Рис. 2.1. Кинематические цепи:
а — замкнутая простая; б — разомкнутая простая;
в — замкнутая сложная; г — разомкнутая сложная
Система звеньев, соединенных с помощью кинематических пар, называется кинематической цепью (рис. 2.1, а - г).
В зависимости от строения различают замкнутые и незамкнутые кинематические цепи. В замкнутой кинематической цепи (рис. 2.1, а, в)каждое звено входит не менее чем в две кинематические пары, в незамкнутой (открытой) цепи (рис. 2.1, б, г)имеются звенья, входящие лишь в одну кинематическую пару (например, механизм весов).
Таким образом, механизм - это кинематическая цепь, в которой при заданном движении одного или нескольких звеньев относительно любого из них все остальные звенья движутся определенным образом.
Звено, относительно которого оцениваются параметры движения (перемещения, скорости и др.), называют стойкой (корпусом, рамой, станиной и т.п.). Обычно в качестве стойки берут неподвижное звено, а в транспортных машинах (автомобилях, самолетах и т.д.) стойкой считают раму, корпус, которые движутся относительно земли.
В зависимости от положения в цепи различают входное и выходное звенья. Входным называют звено, которому сообщается движение от двигателя, выходным — звено, реализующее движение, для выполнения которого и предназначен механизм. Механизмы могут иметь несколько входных и выходных звеньев. Обычно число входных звеньев равно числу степеней подвижности механизма.
Кинематические цепи также условно делят на плоские и пространственные (при движении звеньев в пространстве), на простые (рис. 2.1, а, б)и сложные (рис. 2.1, в, г). Простой называют кинематическую цепь, у которой каждое звено входит в соединение с другим звеном с помощью одной или двух кинематических пар. В противном случае цепь называют сложной.
Дата добавления: 2016-11-29; просмотров: 5499;
Поиск по сайту
Узнать еще
- D-элементы, их применение в медицине и фармации.
- III. 7 ЭЛЕМЕНТЫ СПЕЦИАЛЬНОЙ ТЕОРИИ ОТНОСИТЕЛЬНОСТИ
- Автомобильные дороги: определение группы сооружений, основные конструктивные элементы
- Аккамуляторы и топливные элементы
- Актеры и элементы Use Case
- Активные элементы из неодимового стекла
- Активные элементы схемы замещения
- Активные элементы схемы замещения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
