Задачи решаемые в радиолокационных системах
Процесс получения радиолокационной информации, во многих случаях единый, удобно разделить на следующие этапы:
- обнаружение воздушных объектов;
- измерение координат и параметров движения;
- разрешение;
- распознавание воздушных объектов;
- помехозащита.
Обнаружение состоит в принятии решения о наличии или отсутствии воздушного объекта в каждом выделенном участке пространства с минимально допустимыми вероятностями ошибочных решений.
Измерение сводится к выработке оценок координат и параметров движения воздушного объекта с минимально допустимыми погрешностями. При использовании сферической системы координат обычно измеряют дальность до воздушного объекта r, а также ее азимут b и угол места e (рис. 4.2). В качестве параметров движения воздушного объекта могут вводиться производные координат, либо другие параметры траектории объекта.
Разрешение состоит в выполнении задач обнаружения и измерения параметров произвольного воздушного объекта при наличии других, кроме выбранного для наблюдения. Говорят о разрешении воздушных объектов по дальности, угловым координатам, скорости и т.д. Разрешающую способность по координатам характеризуют элементарным объемом. Размеры последнего по дальности – Dr, в азимутальной плоскости Dlb и в угломестной Dle (рис. 4.3) устанавливаются так, что наличие воздушного объекта в соседнем объеме практически не ухудшает показателей качества обнаружения и измерения координат воздушного объекта, который расположен в центре выделенного объема. Выделенный таким образом элементарный объем называют разрешаемым объемом (при импульсном облучении воздушного объекта – импульсным объемом).
Распознавание заключается в установлении принадлежности разрешаемого воздушного объекта к определенному классу. В одних случаях необходимо установить принадлежность «свой – чужой» с помощью запросно-ответных устройств радиолокационного опознавания, в других – распознать боеголовку баллистической ракеты на фоне ее корпуса, ложных объектов, метеорных следов и т.п. или определить характер искусственного спутника Земли с помощью специальной аппаратуры селекции.
Скоротечность и сложность радиолокационной обстановки требуют, как правило, высокого темпа выдачи данных, образующих потоки с большим объемом информации. Поэтому каждая из задач: обнаружение, измерение, разрешение и распознавание, для любого конечного объема пространства должна решаться за ограниченное время.
К средствам выработки радиолокационной информации предъявляется требование высокой помехозащищенности по отношению к естественным и искусственным помехам.
Помехозащищенность – это способность радиолокатора поддерживать на заданном уровне показатели качества обнаружения, измерения (или распознавания) при наличии помех, а также способность использовать сами помехи как источник информации.
Обнаружение
В процессе функционирования средств радиолокации наиболее часто встречаются ситуации, когда координаты воздушных объектов, их угловые положения, радиальные скорости и факт наличия априорно не известны и должны быть установлены в процессе радиолокационного наблюдения. Таким образом, одной из основных задач средств радиолокации, является обнаружение объекта в заданном пространстве.
Радиолокационное наблюдение всегда сопровождается целым рядом случайных факторов. На полезные сигналы воздействуют внешние шумы и помехи, а также внутренние шумы приемников. Кроме того, сами принимаемые сигналы флюктуируют. В силу этих причин при обработке радиолокационной информации широко используются методы теории вероятности и математической статистики, а сам прием сигналов, в том числе и их обнаружение, рассматривается как статистическая задача.
Из-за статистической природы анализируемого напряжения, принятое решение имеет ту или иную степень достоверности.
Для получения такого решения необходимо выполнить два условия.
Во-первых, должна быть известна некоторая предварительная (априорная) информация о составе выходного напряжения приемника. В качестве априорной информации используются, например, известные функции распределения напряжения шума W0(u) и напряжения суммы сигнала и шума W1(u). Такой же информацией является форма ожидаемого сигнала.
Во-вторых, обработка выходного напряжения и принятие решения о наличии или отсутствии цели должны быть выполнены по определенному правилу. Применение этого правила должно максимально увеличить объем полученной (апостериорной) информации о составе выходного напряжения. Рассмотрим процесс получения такого правила.
Решение о наличии или отсутствии сигнала принимается на основании наблюдения процесса x(t) на входе приемника, который в общем случае представляет собой смесь сигнала и шума:
 (4.1)
(4.1)
где n(t) – собственный шум приемника; s(t) – полезный сигнал.
Ситуация, когда сигнал во входной смеси присутствует (l = 1), обозначается символом S1, ситуация, когда он отсутствует (l = 0), – символом S0.
Собственный шум приемника считаем нормальным и «белым». Спектральную плотность мощности шума N0 находим из известной формулы
 , (4.2)
, (4.2)
где kш – коэффициент шума приемника; k = 1,38×10–23 Дж×К–1 – постоянная Больцмана; Т0 – абсолютная температура приемника; Df – шумовая полоса приемника.
Отсюда имеем
 ,
,
где N0 – спектральная плотность мощности шума (односторонняя, для положительных частот).
Энергетический спектр «белого» шума представлен на рис. 4.4.
Корреляционная функция такого шума
 , (4.3)
, (4.3)
где d(t) – дельта-функция Дирака.
Рассматривая реализацию x(t) на интервале 0 – Т, следует принять решение, есть сигнал или его нет.
В радиолокационной практике на основании наблюдения на некотором интервале времени 0 – Т можно вынести одно из трех решений:
– сигнала нет;
– сигнал есть;
– для принятия уверенного решения о наличии или отсутствии сигнала следует продолжить наблюдение.
При бинарном обнаружении цели имеется две группы событий.
В первую группу входят два события, которые отражают фактическую ситуацию в зоне обзора радиолокатора: «цель есть» (событие А1) и «цели нет» (событие А0). Каждое из этих событий имеет свою вероятность появления: Р(А1) и Р(А0). Эти события составляют полную группу, поскольку P(A1)+P(A0)=l и несовместимы, поскольку в данный момент времени может происходить только одно из них.
Во вторую группу входят два других события, которые отражают фактическую ситуацию на выходе системы обработки после анализа полученного напряжения и принятия решения: «цель есть» (событие A'1) и «цели нет» (событие А'0). Вероятности появления этих событий: Р(А'1) и Р(А'0). Эти события также несовместимы и составляют полную группу: Р(А'1)+Р(А'0)=1.
В процессе радиолокационного наблюдения в каждом из элементарных объемов зоны обзора будет иметь место одно из событий первой группы и одно из событий второй группы. В результате в каждом объеме возникнет один из четырех вариантов одновременного наступления двух зависимых событий. Два из этих вариантов дадут безошибочное решение: A1 и A'1 – правильное обнаружение цели и А0 и А'0 – правильное необнаружение цели. И два варианта дадут ошибочные решения: А1 и А'0 – пропуск цели и А0 и A'1 – ложная тревога. Ошибочные варианты появятся благодаря статистическому (шумовому) характеру выходного напряжения приемника, не позволяющему получать полностью достоверную информацию.
Известно, что вероятность одновременного наступления двух совместимых и зависимых событий Р(Ап+А'k) определяется по правилу умножения вероятностей. Она равна произведению вероятности одного из этих событий Р(Аn) на условную вероятность появления второго, вычисленную в предположении, что первое событие совершилось Р(А'k /Ап):

Условная вероятность ложной тревоги (при условии, что сигнала нет), то есть вероятность того, что напряжение шума u(t) превысит некоторое пороговое значение u0 будет равна:
 .
.
Тогда вероятность ложной тревоги:
 .
.
Условная вероятность пропуска сигнала (при условии, что сигнал есть), то есть вероятность того, что напряжение суммы сигнала и шума не превысит уровень u0 будет равна:
 .
.
Тогда вероятность пропуска сигнала:
 .
.
События (А0+А'1) и (A1+A'0) несовместимы. Тогда вероятность принятия одного из двух ошибочных решений в соответствии с правилом сложения вероятностей будет равна:
Если изменить пределы интегралов, то это выражение можно представить также в следующем виде:
 .
.
Вероятность принятия правильного решения будет равна:

Для отыскания оптимального уровня порога u0 необходимо определить его значение, при котором вероятность правильного решения будет максимальна. Для этого вычислим производную:
и приравняем ее нулю.
В результате получим:  или
или
 .
.
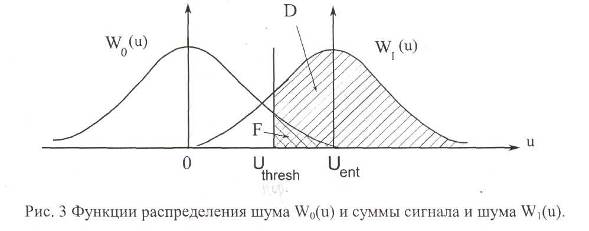
| Рис.4.5. Функции распределения шума W0(u) и суммы сигнала и шума W1(u) |
| Uпор Uвх |
 .
.
При обратном неравенстве принимается решение об отсутствии цели.
Это неравенство справедливо для значения напряжения шума или смеси сигнала и шума в один момент времени и поэтому в него входят одномерные функции распределения W0 и W1. Его можно распространить на случай, когда решение принимается по п отсчетам этого напряжения, полученным в интервале наблюдения. Отсчеты могут быть взяты либо по ансамблю реализаций в один момент времени, либо из одной реализации в разные моменты времени:
 .
.
В этом случае функции распределения W0 и W1 становятся многомерными.
Полученный статистический критерий является наиболее простым. Он называется критерием идеального наблюдателя. Его основной недостаток – отсутствие на практике априорных вероятностей наличия Р(А1) или отсутствия Р(А0) цели в зоне обзора радиолокатора. Кроме того, критерий идеального наблюдателя не учитывает последствий ошибочных решений.
Для устранения этого недостатка в уравнение для оценки вероятности ошибочного решения вводятся весовые коэффициенты В и С, характеризующие потери, связанные с ложной тревогой и пропуском цели:
Р[(А0+А'1) или (А1+А'0)] = B×P(A0+A'1) + C×P(A1+A'0).
В этом случае для принятия решения о наличии цели необходимо выполнение неравенства:
Этот статистический критерий называется критерием минимального риска. Его использование затруднено на практике не только отсутствием априорных вероятностей P(A1) и Р(А0), но и отсутствием априорных оценок важности весовых коэффициентов В и С. Этот критерий, также как и критерий идеального наблюдателя, относится к так называемым байесовским критериям.
Еще одним распространенным критерием является критерий максимального правдоподобия.
Приведенная выше функция распределения п случайных значений напряжения на выходе приемника W(u1, u2, u3, ...un) называется функцией правдоподобия. Существует метод максимального правдоподобия, который позволяет находить максимум этой функции. Для этого производная функции правдоподобия по искомому сигналу приравнивается нулю. Решение полученного уравнения позволяет найти максимально правдоподобную оценку значения сигнала. Так, например, если случайные напряжения на выходе приемника u1, u2, u3, ...un распределены по нормальному закону, то эта оценка совпадает с их средним значением. Метод позволяет получить оценки с наименьшим (относительно других методов) значением дисперсии. Такие оценки называются эффективными. Таким образом, критерием оптимальности процедуры, осуществляемой по методу максимального правдоподобия, является эффективность оценки. При использовании критерия максимального правдоподобия решение о наличии сигнала принимается в том случае, когда функция правдоподобия W1 превосходит функцию правдоподобия W0:
 .
.
Как уже указывалось выше, некоторые априорные вероятности, необходимые для принятия решения о наличии цели, на практике обычно неизвестны. Поэтому наиболее широко используется еще один критерий, не зависящий от этих вероятностей. Это критерий Неймана-Пирсона, который обеспечивает максимальную вероятность правильного обнаружения P(A1+A'1) (в дальнейшем обозначается D) при заданной вероятности ложной тревоги P(A0+A'1) (в дальнейшем обозначается F). В соответствии с этим критерием величина порога u0 в правой части отношения правдоподобия выбирается из заданной условной вероятности ложной тревоги:
 .
.
Таким образом, решение задачи обнаружения цели в большинстве случаев сводится к вычислению отношения:
 , (4.4)
, (4.4)
которое называется отношением правдоподобия. Решение о наличии цели принимается в том случае, когда это отношение превосходит некоторый фиксированный уровень u0, установленный заранее в зависимости от принятого критерия.
Вычисление отношения правдоподобия позволяет сформировать структурную схему оптимального приемника.
Традиционные методы оптимального обнаружения радиолокационных сигналов используют в качестве априорной информации функцию распределения вероятностей напряжения шума на выходе приемника. Этот шум обычно аппроксимируется, так называемым, «белым шумом», имеющим равномерную спектральную плотность мощности N0, (Вт/Гц) в полосе частот приемника Df и нормальную функцию распределения напряжения во времени:
 . (4.5)
. (4.5)
Эта функция распределения имеет нулевое среднее значение и дисперсию s 2 = N0×Df . Отсчеты напряжения шума, отстоящие друг от друга на интервал Dt = 1/2Df , являются статистически независимыми. Тогда функция правдоподобия для N отсчетов напряжения шума является произведением N сомножителей:
 . (4.6)
. (4.6)
Функция распределения суммы сигнала и шума зависит от структуры сигнала. Для понимания общих закономерностей оптимальной обработки в традиционной теории обычно используется гипотетический сигнал, параметры которого полностью известны за исключением времени его прихода. В этом случае функция распределения суммы сигнала и шума отличается от функции распределения шума только тем, что среднее значение этой суммы отлично от нуля и равно амплитуде сигнала s:
 . (4.7)
. (4.7)
Функция правдоподобия суммы сигнала и шума будет равна:
 .
.
Тогда отношение правдоподобия для полностью известного сигнала будет равно:
 .
.
Учитывая, что s 2 = N0×Df, a Dt = l/2Df можем записать: 1/s 2 = 2×Dt/N0. Тогда:
 .
.
Далее в традиционной теории обычно производится переход к пределу при Dt®0. Однако следует помнить, что при этом Df®¥, а, следовательно, и s 2®¥, то есть мощность шума становится бесконечно большой. Тем не менее, такая модель используется. Это позволяет перейти от суммирования к интегрированию на отрезке времени от 0 до Т, где располагаются п случайных значений напряжения на выходе приемника u1, u2, u3, ...un:
 . (4.8)
. (4.8)
Чтобы избавиться от экспоненты в этом выражении и упростить структурную схему оптимального приемника вместо величины L вычисляют ее логарифм:
 . (4.9)
. (4.9)
Второе слагаемое (4.9) является отношением энергии сигнала к спектральной плотности мощности шума и не зависит от выходного напряжения приемника u(t). Для известного сигнала и заданной плотности мощности шума это слагаемое является постоянной величиной, которая может быть учтена при выборе порога u0 (или включена в его состав). Таким образом, для получения оптимального алгоритма обнаружения цели необходимо вычислить интеграл
и сравнить полученную величину с порогом.
Это корреляционный интеграл, который определяет степень связи между сигналом s(t) и выходным напряжением приемника u(t). Можно сказать, что этот интеграл показывает «сколько» ожидаемого сигнала содержится в принятом напряжении. Очевидно, что знание ожидаемого сигнала при данном методе обнаружения является важной априорной информацией.
Схема классической корреляционной обработки, реализующая этот интеграл, приведена на рис. 4.6. Из схемы видно, что в процессе обработки участвует два сигнала: опорный, в качестве которого обычно используется сигнал, излучаемый передатчиком, и отраженный от цели, который поступает в коррелятор из приемника в смеси с шумом. В связи с этим уточним некоторые обозначения:
uоп(t) – напряжение опорного сигнала;
uс(t) – напряжение сигнала, отраженного от цели;
uш(t) – напряжение шума;
u(Т) – напряжение на выходе коррелятора в конце периода накопления Т.
С учетом этих обозначений напряжение на выходе коррелятора имеет вид:
 . (4.10)
. (4.10)
Цель считается обнаруженной, если u(T) > u0.
Выходное напряжение приемника u(t) является входным напряжением для коррелятора. В зависимости от ситуации это напряжение будет равно:
u(t) = uш(t) – в отсутствии принятого сигнала;
u(t) = uс(t) + uш(t) – при наличии принятого сигнала.
Рассмотрим эти ситуации.
Когда сигнал, отраженный от цели, отсутствует, корреляционный интеграл принимает вид:
 . (4.11)
. (4.11)
Фактически этот интеграл показывает изменения функции распределения шума при его прохождении через каскады коррелятора. Для процедуры обнаружения цели это весьма важный вопрос. Дело в том, что в отсутствии сигнала, отраженного от цели, функция распределения шума на выходе коррелятора определяет величину порога u0. Если, например, дисперсия шума на выходе коррелятора по какой-либо причине изменяется, то для поддержания постоянного уровня ложных тревог (по критерию Неймана-Пирсона) необходимо изменять величину порога. Рассмотрим, отчего зависит дисперсия шума в этом случае.
Напряжение шума на входе коррелятора имеет нормальное распределение. При прохождении шума через элементы коррелятора нормальный характер распределения сохраняется. Среднее значение этого распределения остается нулевым. Однако его дисперсия будет отличаться от дисперсии на входе. Для ее изменения есть несколько причин. Во-первых, в процессе работы может измениться спектральная плотность мощности N0, что приведет к изменению дисперсии шума. Во-вторых, из-за перемножения напряжения шума с опорным сигналом дисперсия шума будет увеличиваться пропорционально энергии Е этого сигнала.
Чтобы при увеличении дисперсии шума сохранить постоянный уровень ложных тревог, потребуется повышать величину порога u0. Однако, чтобы при этом сохранить заданную вероятность правильного обнаружения, необходимо увеличить отношение сигнал-шум, то есть увеличить энергию сигнала, отраженного от цели.
На практике принимаются меры по стабилизации уровня порога (стабилизации уровня ложных тревог). С этой целью напряжения шума и опорного сигнала нормируются, то есть делятся на  и
и  соответственно. При этом значение порога u0 будет оставаться постоянным. Однако для сохранения заданной вероятности правильного обнаружения отношение сигнал-шум все равно необходимо увеличивать.
соответственно. При этом значение порога u0 будет оставаться постоянным. Однако для сохранения заданной вероятности правильного обнаружения отношение сигнал-шум все равно необходимо увеличивать.
В общем случае дисперсия напряжения шума на выходе коррелятора зависит также от времени интегрирования Т. Однако, при согласовании полосы приемника с длительностью интегрируемого сигнала эта зависимость отсутствует.
Когда отраженный от цели сигнал присутствует во входном напряжении коррелятора, то корреляционный интеграл принимает вид:
 .
.
Первый интеграл в этом выражении определяет ненулевое среднее значение функции распределения W1(u). Второй интеграл определяет дисперсию этой функции, которая будет такой же, как и у функции W0(u) в отсутствие сигнала, отраженного от цели.
Вероятность ложной тревоги равна:
 , (4.12)
, (4.12)
а вероятность правильного обнаружения:
 . (4.13)
. (4.13)
Используя интеграл вероятностей:
 , (4.14)
, (4.14)
можно переписать:
 . (4.15)
. (4.15)
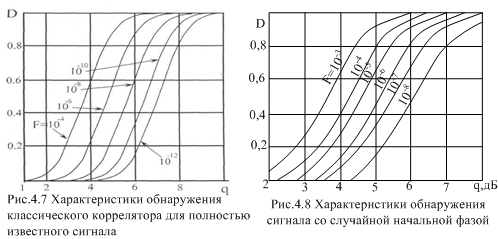
С помощью этих формул строятся характеристики обнаружения, то есть зависимости правильного обнаружения D от отношения сигнал-шум s/N0 при фиксированной вероятности ложной тревоги F (рис. 4.7). Приведенные зависимости построены для полностью известного сигнала и поэтому являются наилучшими среди характеристик обнаружения, построенных для любых других видов сигналов. В связи с этим в дальнейшем эти характеристики используются, как эталонные.
На рис.4.8 изображены характеристики обнаружения сигнала со случайной начальной фазой.
Дата добавления: 2021-02-19; просмотров: 581;
Поиск по сайту
Узнать еще
- I. Задачи Единой всероссийской спортивной классификации
- II. Цели и задачи службы .
- II. Цель, задачи, приоритеты Стратегии
- III.3.7. ПРЕДМЕТ И ЗАДАЧИ ЛОГОПСИХОЛОГИИ
- IV.2.7. ПРЕДМЕТ И ЗАДАЧИ ПСИХОЛОГИИ ДЕТЕЙ С ДИСГАРМОНИЧЕСКИМ СКЛАДОМ ЛИЧНОСТИ
- IY.1.7. ПРЕДМЕТ И ЗАДАЧИ ПСИХОЛОГИИ ДЕТЕЙ С РДА
- V.7. ПРЕДМЕТ И ЗАДАЧИ ПСИХОЛОГИИ ДЕТЕЙ СО СЛОЖНЫМИ НАРУШЕНИЯМИ РАЗВИТИЯ
- Автоматическая частотная разгрузка в системах электроснабжения. Назначение, принцип действия.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
