АТОМНО-СИЛОВАЯ МИКРОСКОПИЯ
1○ Общие сведения о АСМ.
В основе работы АСМ лежит определение силы взаимодействия между зондом и поверхностью (см. рис. 6).
Рисунок 6. Принципиальная схема АСМ
2○ Зондовые датчики для атомно-силовых микроскопов
Исследование поверхности в атомно-силовом микроскопе производится с помощью специальных зондовых датчиков, представляющих собой упругую балку – кантилевер (cantilever) с острым зондом на конце (см. рисунок 7). Датчики изготавливаются методами фотолитографии и травления из кремниевых пластин. Упругие консоли формируются из тонких слоев легированного кремния, SiO2 или Si3N4.
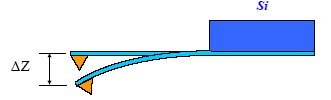
Рисунок 7. Внешний вид зондового датчика
Один конец кантилевера жестко закреплен на кремниевом основании - держателе. На другом его конце располагается зонд в виде острой иглы. Радиус закругления современных АСМ зондов составляет 1 ÷ 50 нм в зависимости от типа зондов и технологии их изготовления. Угол при вершине зонда - 10 ÷ 20 º. Силу взаимодействия зонда с поверхностью F можно оценить следующим образом:
 , (1)
, (1)
где k – жесткость кантилевера; ∆Z – величина, характеризующая его изгиб.
Коэффициенты жесткости кантилеверов k варьируются в диапазоне
10-3 ÷ 10 Н/м в зависимости от используемых при их изготовлении материалов и геометрических размеров. При работе зондовых АСМ датчиков в колебательных режимах важны резонансные свойства кантилеверов.
Собственные частоты изгибных колебаний консоли прямоугольного сечения определяются следующей формулой:
 , (2)
, (2)
где l – длина консоли; Е – модуль Юнга; J – момент инерции сечения консоли; ρ -- плотность материала; S - площадь поперечного сечения;  – численный коэффициент (в диапазоне 1÷100), зависящий от моды изгибных колебаний.
– численный коэффициент (в диапазоне 1÷100), зависящий от моды изгибных колебаний.
Как видно из выражения (2), резонансная частота кантилевера определяется его геометрическими размерами и свойствами материала. Частоты основных мод лежат в диапазоне 10÷1000 кГц.
Добротность кантилеверов, в основном, зависит от той среды, в которой они работают. Типичные значения добротности при работе в вакууме составляют 103 – 104. На воздухе добротность снижается до 300 – 500, а в жидкости падает до 10 – 100.
В атомно-силовой микроскопии применяются зондовые датчики двух типов – с кантилевером в виде балки прямоугольного сечения и с треугольным кантилевером, образованным двумя балками. (см. рисунок 8).
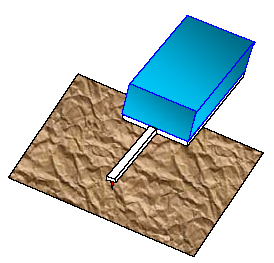 а) АСМ-зондовый датчик с прямоугольным кантилевером
а) АСМ-зондовый датчик с прямоугольным кантилевером
| 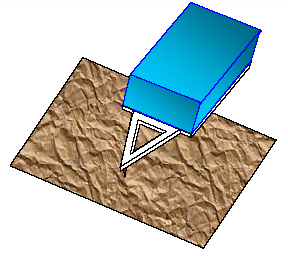 б) АСМ-зондовый датчик с треугольным кантилевером
б) АСМ-зондовый датчик с треугольным кантилевером
|
Рисунок 8. Виды зондовых датчиков
3○ Система оптической регистрации изгиба кантилевера
Получение АСМ-изображений рельефа осуществляется измерением изгибов кантилевера с помощью оптической системы регистрации (рис. 9).
| | |
| Рисунок 9. Система оптической регистрации изгиба кантилевера |
Оптическая система АСМ состоит из полупроводникового лазера, кантилевера со светоотражающим покрытием, четырехсекционного полупроводникового фотоприемника, системы управления. Предварительно лазерный луч фокусируется на свободной части кантилевера так, чтобы отраженный пучок попадал в центральную область фотоприемника.
Оптическая система регистрирует деформации изгиба кантилевера, являющиеся результатом действия сил притяжения или отталкивания FZ, и деформации кручения консоли, обусловленные действием латеральных сил FL. Пусть I01, I02, I03, I04 - начальные фототоки в секциях фотодиода, I1, I2, I3, I4 – токи в соответствующих секциях после произвольной деформации кантилевера, тогда разностные токи ΔIi = Ii - I0i будут однозначно характеризовать величину и направление изгиба консоли зондового датчика АСМ. Причем нормальный изгиб определяется выражением ΔIz = (ΔI1 +ΔI2) – (ΔI3 +ΔI4), латеральный - ΔIL = (ΔI1 +ΔI4) – (ΔI2 +ΔI3).
Для определения морфологии поверхности необходимо перейти от измерения величины токового сигнала ΔIi к измерению геометрического сигнала ΔZi, что на практике осуществляется калибровкой на объектах известной геометрии (калибровочных решетках). Определяются калибровочные коэффициенты для выражений ΔZi =Ai ΔIi и по этим данным восстанавливается морфология исследуемой поверхности.
Дата добавления: 2016-11-29; просмотров: 2256;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
