Замкнутая система управления по отклонению (принцип Ползунова-Уагга).
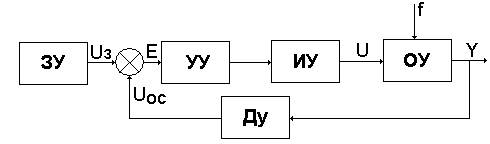
Управляющая величина У измеряется с помощью датчика Ду и сравнивается с заданным значением. Вычисляется ошибка управления e=Uз-Uoc. В зависимости от величины и знака ошибки e, устройство управления формирует управляющее воздействие на объект, стремясь уменьшить величину ошибки.
(e®0) если e=0, то У=Uз
Характерный признак такой системы наличие отрицательной обратной связи (ООС)(общий вход-выход).
Достоинство: универсальность. УУ реагируетна любые отклонения независимо от причины.
Недостаток: внутреннее противоречие принципа (чтобы уменьшить ошибку, надо ее сначала допустить).
4. Комбинированная САУ (сочетает управление по отклонению с управлением по возмущению).
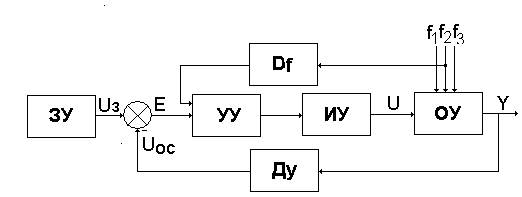
Основное возмущение компенсируется управлением по разомкнутому принципу, а неточность компенсации и влияние неучтенных возмущений устраняется управлением по замкнутому контуру. Здесь самое высокое качество, но самая дорогая структура.
Адаптивная САУ.
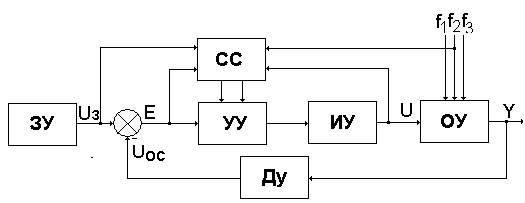
СС – схема самонастройки. Здесь УУ адаптируется с помощью СС в изменяющихся условиях работы.
Классификация САУ
1. По структуре:
1.1. Разомкнутые, возможно, работающие по принципу компенсации возмущения.
1.2. Замкнутые – управление по отклонению.
1.3. Комбинированные.
2. По сложности структуры:
2.1. По количеству цепей ООС:
2.1.1. одноконтурные.
2.1.2. многоконтурные.
2.2. По количеству управляемых величин:
2.2.1. одномерные.
2.2.2. многомерные.
2.3. По структуре:
2.3.1. каскадные САУ
2.3.2. многоуровневые
2.3.3. иерархические
3. По целям управления:
3.1. Uз = const – система стабилизации.
3.2. Uз = var – изменяется по заранее заданной программе (программная САУ).
3.3. Uз = var – характер изменения заранее неизвестен (выходная величина будет отслеживать изменение Uз) – следящая САУ.
4. По виду математического описания:
4.1.
4.1.1. Линейные
4.1.2. Нелинейные
4.2.
4.2.1. Стационарные САУ (если коэффициенты управления системы постоянны во времени)
4.2.2. Нестационарные САУ (если коэффициенты – функции от времени)
4.3.
4.3.1. Системы с сосредоточенными параметрами (описываются обыкновенными ДУ)
4.3.2. Системы с распределенными параметрами (описываются ДУ в частных производных)
4.4.
4.4.1. Детерминированные системы.
4.4.2. Стохастические системы (если коэффициенты уравнения являются случайными функциями).
Дата добавления: 2021-02-19; просмотров: 307;
Поиск по сайту
Узнать еще
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- B. Департаменты и управления функционального характера.
- DSM — система классификации Американской психиатрической ассоциации
- II. НАЛОГОВАЯ СИСТЕМА В СОВРЕМЕННОЙ РОССИИ
- II. Научность, систематичность и последовательность обучения.
- Money Management - основы управления капиталом
- Єдина державна система цивільної оборони населення та територій

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
