Автоматические регуляторы
Данная тема может быть освоена с помощью [1, с. 170-177; 3, с. 92-115]. Классификация САР и автоматических регуляторов помогает пользователю правильно выбрать как систему, так и регулятор с позиции анализа объекта регулирования. В качестве объектов рекомендуется выбрать резервуар с водой и трубопровод. Параметрами регулирования могут быть температура, давление в трубопроводе, уровень воды в резервуаре.
Классификация САР:
- стабилизирующие (параметр регулирования поддерживается на заданном уровне);
- программируемые (параметр регулирования изменяется по заданному закону);
- следящие (параметр регулирования изменяется в зависимости от изменения внешних факторов, значения величин которых заранее неизвестны);
- самонастраивающиеся (значения параметров регулирования поддерживаются на оптимальном с позиции заданного критерия уровне).
В САР используются два основных принципа регулирования:
- по отклонению (с помощью регулирующих воздействий свести отклонение параметра от заданного к нулю);
- по возмущению (при регулировании учитывается влияние среды или режима, параметры которого заранее неизвестны).
Классификация регуляторов:
- по целевому назначению (температуры, скорости, давления, расхода материала, уровня воды);
- по способу воздействия (прямого, косвенного);
- по виду используемой энергии (электрические, пневматические, гидравлические, механические);
- по роду действия (непрерывные, дискретные);
- по характеру регулирующего воздействия (астатический, статический, изодромный).
Объекты регулирования характеризуется устойчивостью и емкостью, самовыравниванием, временем разгона и постоянной времени, запаздыванием.
Объекты могут накапливать энергию, жидкость, газ, тепло; влажность среды, расположение объекта, концентрация веществ – все это может оказаться параметром регулирования для объекта. В процессе работы объекта происходит нарушение равновесия между приходом и расходом вещества или энергии. Емкость объекта тесно связана с приходом и расходом. Нарушение баланса может привести к нарушению устойчивости работы объекта, поэтому при изменении параметров объекта стремятся либо увеличить емкость объекта, либо реализовать функцию САР в виде саморегулирования параметров объекта. В некоторых случаях, когда емкость объекта достаточно велика, степень самовыравнивания может оказаться такой, что отпадает необходимость в регуляторе. Рассмотрим это на примере резервуара с водой (рисунок 17). Здесь V1 и V2 – соответственно скорость подачи и стока воды в резервуаре, Н и Н1 – уровни воды в резервуаре. При увеличении V1 растет уровень Н до уровня Н1. Увеличение гидростатического давления воды приводит к увеличению скорости V2. Через время t, если позволит V1, V2 и объем объекта, установится новый уровень Н, который меняться не будет. Это значит, что подача воды равна стоку (рисунок 18).
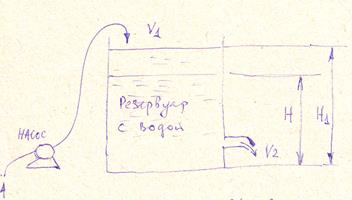
Рисунок 17 – Резервуар с водой
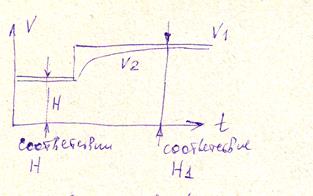
Рисунок 18 – Способность к самовыравниванию
Способность объекта к самовыравниванию определяется степенью самовыравнивания  :
:
 . (18)
. (18)
При ρ ≥ 25 регулятор может не потребоваться. Время разгона Та и время самовыравнивания τ объекта связаны с чувствительностью объекта ε к регулированию: ε = 1/Та и τ = 2Та/ρ.
Для отработки силового воздействия на объект САР требуется регулирующий или управляющий орган в виде регулирующего или исполнительного механизма.
К регулирующим механизмам в ВиВ относят клапаны, вентили, шиберы, задвижки, заслонки, питатели, реостаты, автотрансформаторы и т.д. К исполнительным – электродвигатели, электромагниты, гидравлические и пневматические механизмы.
Исполнительные механизмы характеризуются:
- временем разгона;
- коэффициентом усиления по мощности;
- скоростью на выходе;
- усилием на выходе;
Линейным или угловым перемещением на выходе.
Регулирующие органы определяются:
- величиной перестановочного усилия, необходимого для перемещения регулирующего органа;
- скоростью перемещения регулирующего органа;
- зависимостью изменения расхода регулируемой среды от перемещения регулирующего органа.
Конструктивно исполнительные механизмы выполняют поршневыми, электромагнитными, мембранными, сильфонными, электромоторными, комбинированными. По характеру перемещения регулирующего органа исполнительные механизмы делят на две группы: механизмы с постоянной скоростью и механизмы с пропорциональной входной величине скоростью. Само перемещение может быть организовано как возвратно-поступательное, так и вращательное. Для САР чаще всего используют исполнительные механизмы на основе электродвигателей и электромагнитов.
Электромоторные исполнительные механизмы: ИМ-2/120 до ИМТ-25/120, где Т – наличие тормоза, первая цифра – Мн на выходном валу (кГс∙м), вторая цифра – номинальное время одного оборота выходного вала (с). Исполнительные моторные механизмы малой мощности выпускаются для двухпозиционного механизма типа ДР, для реализации пропорциального регулирования типа ПР. Электромагнитный механизм можно использовать для управления механизмом открытия и закрытия клапана.
Группа пневматических исполнительных механизмов включает в себя мембранные, сильфонные и поршневые механизмы. Чаще всего они объединены с клапаном: МИМ – для двухпозиционного и пропорционального регулирования, РКУТ – для пропорционального регулирования, ПРК – для малых расходов.
Исполнение и назначение регулирующих органов ВиВ: краны – пробковые, муфтовые, фланцевые, одно-и многоходовые; вентили – муфтовые, фланцевые, цапковые (используются для регулирования расхода жидкости в трубах диаметром до 200 мм); задвижки – параллельные и клиновые с выдвижным или не выдвижным шпинделем (снабжены электро-или гидроприводом); клапаны – используются в водопроводных и канализационных сооружениях для регулирования расхода реагентов в виде растворов и суспензий; заслонки – применяются для регулирования расхода жидкости, воздуха и газа, когда их рабочее давление невелико; шиберы – для регулирования расхода жидкости в открытых каналах, другое название – затворы поворотные или щитовые.
Рассмотрим работу регулятора дискретного действия на примере регулятора температуры воды в резервуаре (рисунок 19).
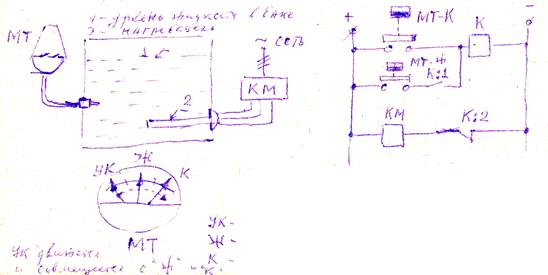
Рисунок 19 – Дискретный регулятор температуры воды в резервуаре
На рисунке 19 приняты следующие обозначения: МТ – манометрический термометр; КМ – магнитный пускатель; К – реле управления; УК – стрелка манометра, которая при увеличении температуры может занимать вначале положение «Ж», а затем и «К».
При включении магнитного пускателя начинается нагрев воды в баке нагревателем 2. Увеличение температуры воды вызовет движение стрелки УК вначале до уровня «Ж», при котором включается контакт МТ-Ж в цепи управления реле К и подготавливается цепь самоподпитки реле К. Когда температура достигнет уровня «К», замыкается контакт МТ-К и запитывается катушка реле К. Реле срабатывает и становится на самоподпитку по цепи: «+» - «МТ-Ж» - «К:1» - «К» - «-». Одновременно размыкается контакт «К:2» и КМ отключается, тем самым прекращая работу нагревателя 2. Температура воды в баке падает и стрелка УК вначале проходит положение «Ж», а затем становится и в положение левее уровня «Ж». В этот момент контакт МТ-Ж размыкается, обесточивая реле К. Контакт «К:1» размыкается, снимая цепь самоподпитки, а «К:2» замыкается, включая КМ и нагреватель. Вода в баке вновь начинает нагреваться до уровня «Ж», а затем и «К».
Рассмотрим работу регулятора непрерывного действия на примере астатического регулятора давления воды в трубопроводе (рисунок 20). Такой регулятор поддерживает постоянное значение давления воды в трубопроводе и имеет только одну точку устойчивости и равновесия. Происходит стабилизация заданного пользователем давления воды в трубопроводе.
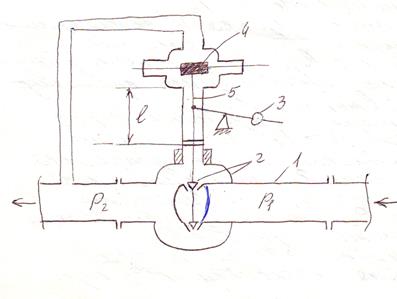
Рисунок 20 – Астатический регулятор давления воды в трубопроводе
На рисунке 20 приведены следующие обозначения: 1 – трубопровод; 2 – двухседельный клапан; 3 – груз, имеющий постоянную величину и организующий давление Ргр; 4 – дифманометр, измеряющий разность давлений Р1 и Р2 в трубопроводе до и после клапана; 5 – регулирующий шток длиной  .
.
Клапан является регулирующим органом, на который воздействуют две силы: Р2 и Ргр. При их равенстве клапан находится в начальном положении.
Если Р2 > Ргр, то мембрана дифманометра уходит вниз, перемещая с помощью штока запорные органы клапана вниз. Давление воды Р2 уменьшается. В случае Р1 > Ргр происходит обратное и давление Р2 увеличивается. Таким образом, давление Р2 стабилизируется относительно Р1. Регулятор хорош при инерционности объекта регулирования и относительно медленном изменении параметров регулируемой среды.
 , (19)
, (19)
где  – регулирующее воздействие, организованное перемещением штока;
– регулирующее воздействие, организованное перемещением штока;  – начальное положение штока; Δх – входное воздействие со стороны Р1 или Р2; Тим – время, в течение которого исполнительный механизм переводит регулирующий орган в крайнее по положения.
– начальное положение штока; Δх – входное воздействие со стороны Р1 или Р2; Тим – время, в течение которого исполнительный механизм переводит регулирующий орган в крайнее по положения.
Регулятор, имеющий такую характеристику, называют интегральным. При быстрых изменениях параметров регулируемой среды такой регулятор может работать неустойчиво, поскольку имеет только одну точку равновесия. Этого недостатка не имеет статический регулятор, в котором груз 3 заменен на пружину, конструктивно расположенную на штоке. При сжатии пружины сила упругости пружины возрастает, т.е. давление пружины – величина переменная в отличии от давлении груза. Это значит, что в данном регуляторе можно иметь несколько точек равновесия при Р1 = Р2. Тогда регулятор становится пропорциональным:
 , (20)
, (20)
где «к» - коэффициент пропорциональности.
Для получения дополнительных положительных свойств в САР вводят обратные положительные или отрицательные связи по параметрам регулирования.
Дата добавления: 2016-10-18; просмотров: 2456;
Поиск по сайту
Узнать еще
- А. Потенциометрические регуляторы громкости
- Автоматические (пневматические) выключатели управления (ПВУ).
- Автоматические воздушные выключатели
- Автоматические выключатели
- Автоматические выключатели
- Автоматические выключатели ВА21-29 вагонов 81-717.5м /81-714.5м
- Автоматические выключатели управления (АВУ) усл.№ Э-119Б, усл.№ Э-119В.
- Автоматические выключатели.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
