Уравновешенные мосты
Мосты подразделяют на неавтоматические и автоматические. В них используется нулевой метод измерения. С помощью неавтоматических мостов, используемых в лабораторных условиях, измеряют сопротивление от 0,5 до 107 Ом, в частности производят градуировку термопреобразователей сопротивления и измеряют температуру.
Схема уравновешенного моста показана на рисунке 15.6.2 Диагональ питания моста аЬ содержит источник тока, а диагональ измерения dс нуль-индикатор, в частности нуль-гальванометр. Между точками подключения разноименных диагоналей располагаются плечи моста, состоящие в данном случае из постоянных резисторов R1 и R2 и регулируемого R3, а плечо сb содержит измеряемое сопротивление Rt и два соединительных провода каждый сопротивлением RBH . Если мост уравновешен, то ток IНИ в диагонали сd. равен нулю, а токи в соответствующих плечах равны, т. е. I2=I3 и I1=It, и как следствие, имеем –I2R2=I1R1 и I3R3=It(Rt+2RBH.).
Разделив два последних равенства друг на друга, с учетом равенства соответствующих токов получаем выражение (14.94) /8/
 (14.94)
(14.94)
Полученное выражение, выведенное из условия IНИ = 0, предопределяет условие равновесия моста: чтобы мост находился в равновесии, необходимо соблюсти равенство произведений сопротивлений противоположных его плеч. Это достигается путем регулирования сопротивления резистора R3 до тех пор, пока нуль-индикатор не покажет нуль.

Рисунок 14.144- Схема уравновешенного моста
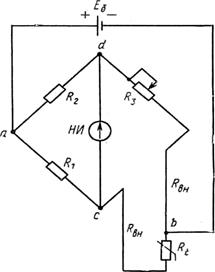
Рисунок 14.145 - Трехпроводная схема соединения термопреобразователя сопротивления с мостом
Таким образом, при равновесии моста имеетместо равенство (14.95) /8/
 (14.95)
(14.95)
Из (14.94) следует, что неизвестное сопротивление Rt может быть определено по значению R3 при постоянном отношении плеч R1/R2, а также при неизменном значении RBH. В то же время RBH изменяется с изменением температуры окружающей среды, что приводит к искажению результата измерения Rt и в тем большей степени, чем меньше значение Rt. Указанный недостаток может быть устранен путем трехпроводного соединения термопреобразователя сопротивления с мостом (рисунок 15.6.3). При таком соединении питающая диагональ моста доводится (точка b) до термопреобразователя сопротивления. В результате этого соединительные провода оказываются разнесенными к двум плечам моста: одно из сопротивлений RBH — в плече вместе с сопротивлением RЗ, а другое RBH — в смежном плече вместеc Rt . Тогда условие равновесия моста определяет равенство (14.96) /8/
 (14.96)
(14.96)
Откуда следует выражение (14.97) /8/
 (14.97)
(14.97)
Если сделать мост симметричным (R1 = R2), то будем иметь Rt = R3. т. е. результат измерения Rt в этом случае не зависит от сопротивления соединительных проводов RBH.
Недостатком уравновешенных мостов, собранных по указанным схемам (рисунки 14.144 и 14.145), является неопределенность в измерении, которую вносит переходное сопротивление контакта в регулируемом плече R3. Для устранения этого недостатка подвижный контакт располагают в измерительной диагонали, при этом регулируемое сопротивление оказывается размещенным в двух плечах. Таким образом, при уравновешивании моста путем перемещения контакта изменяется сопротивление сразу обоих плеч, а переходное сопротивление контакта, располагаемое теперь в измерительной диагонали, из-за отсутствия тока в момент уравновешивания не сказывается на результате измерения.
Достоинством уравновешенных мостов является независимость их от напряжения питания, минимально допустимое значение которого определяется чувствительностью нуль-индикатора.
Автоматический уравновешенный мост, собранный по схеме с переменным сопротивлением плеч и трехпроводным соединением термопреобразователя сопротивления с мостом, показан на рисунок 14.146.
Переменное сопротивление здесь содержит три параллельно соединенных резистора: RP—собственно реохорд, выполняющий измерительные функции; RШ—шунт реохорда; RП—резистор для подгонки заданного значения параллельного соединения сопротивлений всей реохордной группы; RПР, R1, R2, R3 — резисторы мостовой схемы; RД—добавочный резистор для подгонки тока из условия минимального самонагрева термопреобразователя сопротивления; Rб — резистор балластный в цепи питания для ограничения тока; Rt — термопреобразователь сопротивления; RЛ — резистор для подготовки сопротивления соединительной линии; т — положение движка реохорда правее точки d в долях от RПР; n — положение движка реохорда левее точки d в долях от RПР.

Рисунок 14.146 - Схема автоматического уравновешенного моста
Для получения линейной зависимости положения движка реохорда от изменения сопротивления резистора Rt последний включается в плечо, прилежащее к реохорду.
В качестве нуль-индикатора НИ в автоматических мостах используется электронный усилитель ЭУ. Автоматические мосты питаются как переменным, так и постоянным током. В последнем случае на входе ЭУ устанавливается модулятор, подобно тому, как это делается в автоматических потенциометрах. При изменении температуры изменяется сопротивление Rt и мост выходит из равновесия, т. е. в измерительной диагонали cd появляется напряжение дебаланса  , которое усиливается усилителем ЭУ до значений, достаточных для вращения ротора реверсивного двигателя КД в соответствующую сторону, в зависимости от знака дебаланса. Вал РД, связанный с движком реохорда, перемещает его до тех пор, пока дебаланс не станет равным нулю. Одновременно с движком перемещается каретка с пером и стрелкой, указывающей по шкале положение т движка или, что то же, значение измеряемой температуры. При изменении температуры от минимального до максимального значения движок перемещается из одного крайнего положения в другое (для схемы, показанной на рисунке 15.6.4, соответственно справа налево). Пусть при температуре, соответствующей начальному значению шкалы прибора, измеряемое сопротивление Rt равно Rtнач, а при изменении температуры
, которое усиливается усилителем ЭУ до значений, достаточных для вращения ротора реверсивного двигателя КД в соответствующую сторону, в зависимости от знака дебаланса. Вал РД, связанный с движком реохорда, перемещает его до тех пор, пока дебаланс не станет равным нулю. Одновременно с движком перемещается каретка с пером и стрелкой, указывающей по шкале положение т движка или, что то же, значение измеряемой температуры. При изменении температуры от минимального до максимального значения движок перемещается из одного крайнего положения в другое (для схемы, показанной на рисунке 15.6.4, соответственно справа налево). Пусть при температуре, соответствующей начальному значению шкалы прибора, измеряемое сопротивление Rt равно Rtнач, а при изменении температуры  Условия равновесия для двух этих случаев представляются в виде равенства (14.98) и (14.99) /8/
Условия равновесия для двух этих случаев представляются в виде равенства (14.98) и (14.99) /8/
 , (14.98)
, (14.98)
 (14.99)
(14.99)
Вычитая из второго равенства первое и решая относительно т, получим (14.100) /8/
 (14.100)
(14.100)
Отсюда видно, что т — линейная функция  . Кроме того, из последнего выражения следует, что, несмотря на трехпроводную схему соединения термопреобразователя сопротивления с мостом, показания последнего зависят от изменения сопротивления соединительных проводов. Однако эта зависимость, как показывают расчеты из различных источников, незначительна и при изменении температуры окружающей среды до t=40 °С изменение сопротивления проводов RЛ приводит к изменению показаний прибора в пределах (0,05— Ч) % от нормирующего значения измеряемой величины для различных диапазонов измерения. Полностью отсутствует влияние сопротивления соединительных проводов при симметричном мосте, т. е. когда
. Кроме того, из последнего выражения следует, что, несмотря на трехпроводную схему соединения термопреобразователя сопротивления с мостом, показания последнего зависят от изменения сопротивления соединительных проводов. Однако эта зависимость, как показывают расчеты из различных источников, незначительна и при изменении температуры окружающей среды до t=40 °С изменение сопротивления проводов RЛ приводит к изменению показаний прибора в пределах (0,05— Ч) % от нормирующего значения измеряемой величины для различных диапазонов измерения. Полностью отсутствует влияние сопротивления соединительных проводов при симметричном мосте, т. е. когда  . Так как это условие может быть реализовано лишь при одной измеряемой температуре, то обычно его выполняют для температуры tсред, соответствующей середине диапазона шкалы. При этом
. Так как это условие может быть реализовано лишь при одной измеряемой температуре, то обычно его выполняют для температуры tсред, соответствующей середине диапазона шкалы. При этом  /8/.
/8/.
Назначение, устройство и принцип работы основных узлов автоматического моста — модулятора (при питании моста постоянным током), электронного усилителя, реверсивного двигателя, реохорда, записывающего устройства, привода диаграммы, переключателя (в многоточечных приборах) — такие же, как и в автоматических потенциометрах.
Выпускаемые в настоящее время автоматические мосты отличаются друг от друга назначением, конструкцией, размерами, точностью измерения и другими техническими характеристиками, например мосты одноточечные и многоточечные, самопишущие и показывающие с ленточной, а также с дисковой диаграммой: полногабаритные, малогабаритные и миниатюрные с шириной диаграммной ленты соответственно 250, 160 и 100 мм. Классы точности автоматических мостов равны 0,25; 0,5 и 1, а время пробега стрелки всей шкалы 1; 2,5 и 10 с. В автоматические мосты встраиваются электрические и пневматические регулирующие устройства, а также устройства сигнализации; для дистанционной передачи показаний — преобразователи пневматические, токовые, частотные и др.
Дата добавления: 2016-10-07; просмотров: 3909;
Поиск по сайту
Узнать еще
- АВТОМАТИЧЕСКИЕ ЭЛЕКТРОННЫЕ ПОТЕНЦИОМЕТРЫ И МОСТЫ.
- Безраспорные висячие мосты с балкой жесткости
- ВАНТОВЫЕ МОСТЫ С РЕШЕТЧАТЫМИ ФЕРМАМИ
- Двухпролетные висячие мосты
- Контейнеризация мировой транспортной системы и «транспортные мосты»
- Многопролетные висячие мосты
- Мосты для измерения емкостей.
- МОСТЫ И ДЕЛИТЕЛИ МОЩНОСТИ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
