Комбинированные системы
1.Система, реализующая принцип управления по возмущению и принцип управления по отклонению.
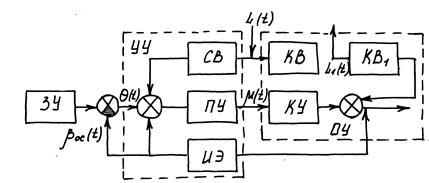
СВ-связь по возмущению.
Канал компенсации - связь по возмущению – организуется для наиболее сильного возмущения L(t), а остальные возмущения компенсируются цепью обратной связи, реализующей управление по отклонению.

Управляющее воздействие является функцией разностного сигнала на выходе элемента  и наиболее сильного возмущающего воздействия L(t).
и наиболее сильного возмущающего воздействия L(t).
2.Система, реализующая управление по задающему воздействию и принцип управления по отклонению.
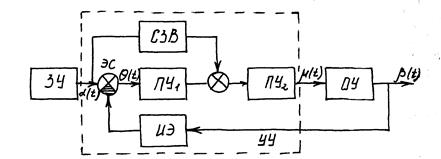
СЗВ – связь по задающему воздействию.

Управляющее воздействие является функцией разностного сигнала и задающего воздействия  .
.
Достоинства комбинированных систем:
1.Возможно достижение полной компенсации ошибок, вызванных внешними воздействиями за счет создания связи по возмущению.
2.С помощью обратной связи уменьшаются ошибки, вызванные второстепенными возмущающими воздействиями.
3.Данные системы менее чувствительны к изменениям параметров разомкнутых систем.
4.Не так остро стоит проблема устойчивости, как в разомкнутых системах.
Классификация систем радиоавтоматики.
1.По алгоритму функционирования:
1).Стабилизирующие: системы поддерживают постоянным выходное воздействие  при изменяющихся внешних воздействиях.
при изменяющихся внешних воздействиях.
2).Программные: изменение по определенному закону (программе), определяемому задающим воздействием , которое изменяется в соответствии с заранее известной программой.
3).Следящие: изменение выходного сигнала следует за изменением задающего воздействия , которое является заранее неизвестной функцией времени.
4).Преобразующие: преобразуют с необходимой точностью задающее воздействие в управляемую величину в соответствии с заданной системой радиоавтоматики функции преобразования, т.е.  .
.
2.По свойствам в установившемся режиме:
1).Статическая: это система, в которой при любом задающем воздействии и возмущающем воздействии L(t), имеющем постоянное значение, отклонение выходного сигнала также стремится к постоянной величине, зависящей от этого воздействия. Различают статические системы по возмущающему воздействию и по задающему воздействию.
2).Астатическая система: это система, в которой отклонение управляющей величины в установившемся режиме при любом постоянном возмущающем или задающем воздействиях равно 0, а, следовательно, равно 0 и отклонение выходного сигнала . По составу астатическая система отличается от статической наличием интегрирующих звеньев. Число интегрирующих звеньев задает порядок астатизма.
3.По способу настройки:
1).Самонастраивающиеся: это системы, в которых предусмотрена автоматическая настройка при изменении характеристик внешних воздействий или параметров самой системы и корректируются характеристики.
2).Несамонастраивающиеся.
4.По режиму работы:
1).Линейные: они описываются линейными уравнениями даже при значительных отклонениях выходного воздействия.
2).Нелинейные: в общем случае описываются нелинейными уравнениями, которые могут быть линеаризованы для малых отклонений выходного сигнала.
3).Существенно нелинейные (релейные).
5.По характеру изменения задающего и выходного воздействий:
1).Системы непрерывного действия, если и -непрерывные величины.
2).Дискретные (цифровые, импульсные и релейные): в этих системах и имеют дискретный характер.
Примеры систем радиоавтоматики.
1).Система автоматической подстройки частоты (АПЧ).
Применяется в радиоприемных устройствах, доплеровских системах измерения скорости подвижных объектов, устройствах частотной селекции сигналов.
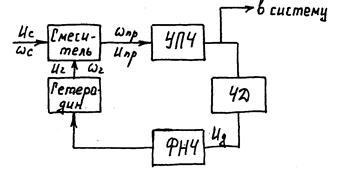
На рисунке АПЧ приемного действия для поддержания  на определенном уровне. При уходе за пределы полосы пропускания УПЧ, нарушается прием и тогда =
на определенном уровне. При уходе за пределы полосы пропускания УПЧ, нарушается прием и тогда =  -
-  .
.
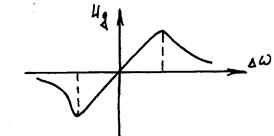
ЧД – частотный дискриминатор.
Если отличается на  от номинального значения
от номинального значения  , равного центральной частоте УПЧ, то на выходе частотного дискриминатора вырабатывается напряжение Uд, значение и знак которого зависят от значения и знака . Uд поступает на ФНЧ и гетеродин, частота которого перестраивается таким образом, что
, равного центральной частоте УПЧ, то на выходе частотного дискриминатора вырабатывается напряжение Uд, значение и знак которого зависят от значения и знака . Uд поступает на ФНЧ и гетеродин, частота которого перестраивается таким образом, что  .
.
Основные соотношения работы АПЧ.
1. = - =  -
-  , где , - отклонения частоты сигнала и частоты гетеродина от номинальных значений.
, где , - отклонения частоты сигнала и частоты гетеродина от номинальных значений.
2.Uд=  , где -дискриминационная характеристика при малых , она линейна.
, где -дискриминационная характеристика при малых , она линейна.
Uд= 
 , где - коэффициент частотного дискриминатора.
, где - коэффициент частотного дискриминатора.
3. =  Uд, где
Uд, где  - коэффициент передачи гетеродина.
- коэффициент передачи гетеродина.
В результате получаем следующее выражение:
= 
 - коэффициент передачи всей системы АПЧ.
- коэффициент передачи всей системы АПЧ.
Чем больше коэффициент передачи АПЧ, тем меньше ошибка отработки изменения частоты сигнала. Зная допустимую ошибку и предполагая максимальное значение , можно сформулировать требования к коэффициенту передачи АПЧ.
Структурная схема АПЧ.
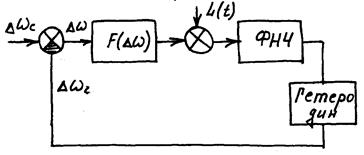
Данная схема является замкнутой, принцип управления по отклонению.
L(t) – флуктуационная составляющая напряжения, поступающего с частотного дискриминатора; нестабильность частоты гетеродина.
2).Система фазовой автоподстройки частоты (ФАПЧ).
Применяется в радиоприемных устройствах, перестраиваемых по частоте генераторов высокостабильных колебаний.
Функциональная схема ФАПЧ.
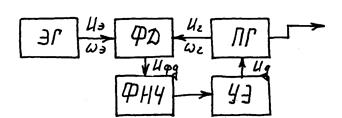
Система стабилизирует частоту подстраиваемого генератора по сигналу с высокостабильного эталонного генератора. В установившемся режиме  равна , а
равна , а  . В результате Uфд=const.
. В результате Uфд=const.
Основные соотношения работы ФАПЧ.
1. Начальное согласование
 , где
, где  - начальная частота подстраиваемого генератора.
- начальная частота подстраиваемого генератора.
2. После включения ФАПЧ
 ,
,  , где
, где
 - коэффициент передачи управляющего элемента;
- коэффициент передачи управляющего элемента;
 - коэффициент передачи фазового дискриминатора.
- коэффициент передачи фазового дискриминатора.
 .
.
3.  , где
, где  - начальное значение разности фаз.
- начальное значение разности фаз.
 ’=
’=  .
.
4.  ,
,  - коэффициент передачи системы.
- коэффициент передачи системы.
Данное уравнение является дифференциальным уравнением работы системы ФАПЧ.
Структурная схема ФАПЧ
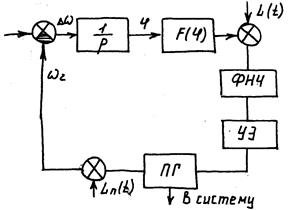
L(t) – возмущающее воздействие, которое определяет влияние на качество работы системы флуктуационной составляющей напряжения.
Lp(t) – нестабильность частоты перестраиваемого контура.
3).Система автоматического сопровождения цели РЛС.
РЛС сопровождения предназначена для автоматического измерения составляющих угла отклонения линии визирования в системе координат, связанной с РЛС.
В антенне формируются в вертикальной и горизонтальной плоскостях 2 диаграммы направленности, которые разнесены относительно равносигнального направления на постоянный угол  .
.
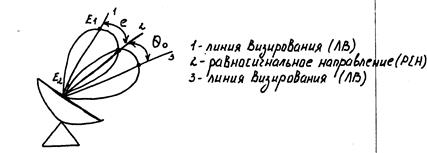
Угол между линией визирования (ЛВ) и равносигнальным направлением (РСН) e. Он задает рассогласование при отклонении линии визирования от равносигнального направления.
Основные соотношения работы.
1.  ;
;  , где
, где
Е0- сигнал, принимаемый по равносигнальному направлению;
 - коэффициент передачи антенны.
- коэффициент передачи антенны.
2.  - разность сигналов антенны с двух диаграмм направленности, пропорциональная углу отклонения линии визирования от равносигнального направления.
- разность сигналов антенны с двух диаграмм направленности, пропорциональная углу отклонения линии визирования от равносигнального направления.
3. Во избежание влияния абсолютных значений Е1 и Е2 на измерения, разностный сигнал нормируется суммарным сигналом.
 =Е1+Е2=2Е0.
=Е1+Е2=2Е0.
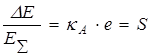 - пелингационная характеристика.
- пелингационная характеристика.
Функциональная схема приемника системы сопровождения цели.
 .
.  поступает на усилитель мощности, затем на электродвигатель, на редуктор, а после на антенну. В результате поворота антенны линия визирования совпадает с равносигнальным направлением.
поступает на усилитель мощности, затем на электродвигатель, на редуктор, а после на антенну. В результате поворота антенны линия визирования совпадает с равносигнальным направлением.
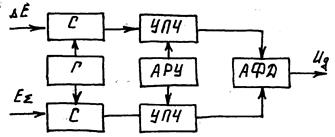
Структурная схема системы сопровождения цели.
УМ – усилитель мощности;
ЭД – электродвигатель;
Р – редуктор;
А – антенна;
МОС – местная обратная связь;
L(t) – флуктуация отражения от цели радиолокационного сигнала; угловой шум, обусловленный перемещением от цели центра отраженного сигнала; шум первых каскадов приемника.
4).Система АРУ.
Предназначена для стабилизации уровня сигнала на выходе усилителей при большом динамическом диапазоне изменения входного сигнала, например, в радиолокационных приемниках диапазоном от 60 до 100дБ. Системы АРУ можно разделить на:
1. Системы с обратной связью (обратным действием);
2. Без обратной связи (прямого действия);
3. Комбинированные.
Функциональная схема системы АРУ с обратной связью.
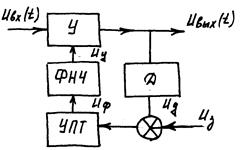
Uвых(t) детектируется в детекторе, затем суммируется с Uз, проходит УПТ, фильтр низких частот, напряжение которого Uп используется для регулировки коэффициента усиления входного сигнала. Регулировочная характеристика выглядит следующем образом:

 - коэффициент усиления, когда Uу=0;
- коэффициент усиления, когда Uу=0;
 - крутизна регулировочной характеристики.
- крутизна регулировочной характеристики.
Эффект стабилизации проявляется следующим образом. При повышении Uвых, растет управляющее напряжение, коэффициент усиления уменьшается, что приводит к уменьшению выходного напряжения. Напряжение Uз вводится для исключения уменьшения усиления при слабых входных сигналах, т.к. управляющее напряжение Uу появляется только в том случае, когда  д
д  Uз.
Uз.
ФНЧ в обратной связи системы АРУ служит для выделения частот измерения уровня выходного напряжения и не пропускает частоты спектра полезной модуляции входного сигнала. Иначе произойдет демодуляция входного сигнала.
Основные соотношения работы системы АРУ.
1. Напряжение на выходе УПТ:
 , если
, если 
 , если
, если  .
.
2. Управляющее напряжение на выходе ФНЧ:
 .
.
3. Выходное напряжение системы АРУ:
 .
.
Структурная схема системы АРУ.
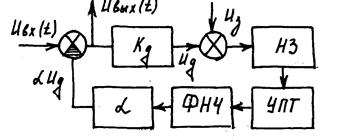
НЗ – нелинейное звено.
Обобщенная структурная схема системы радиоавтоматики.
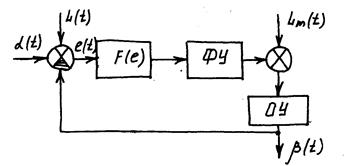
 - дискриминатор с дискриминационной характеристикой
- дискриминатор с дискриминационной характеристикой  , линейной при малых величинах
, линейной при малых величинах  .
.
ФУ – функциональное устройство: устройство измерения сигнала ошибки, исполнительные и корректирующие устройства.
ОУ – объект управления, выходной сигнал которого .
L(t), Ln(t) – возмущающие воздействия.
Основные характеристики систем радиоавтоматики.
1.Общее уравнение систем радиоавтоматики.
В общем случае процессы, происходящие в системах радиоавтоматики описываются нелинейными дифференциальными уравнениями, которые могут быть решены в отдельных редких случаях. Но для большого числа систем уравнения могут быть линеаризованы, т.е. характеристики элементов заменяют линейными функциями. Тогда процессы в системах описываются линейными дифференциальными уравнениями вида:

 производные;
производные;
 - производные n-ого порядка выходного сигнала.
- производные n-ого порядка выходного сигнала.
2. Передаточная функция.
Применим к линейному дифференциальному уравнению, описывающему работу систем радиоавтоматики преобразования Лапласа. В результате получим следующее выражение:

 - степенной многочлен n-ого порядка;
- степенной многочлен n-ого порядка;
 ;
;
 ;
;
 - преобразование Лапласа для выходного сигнала системы;
- преобразование Лапласа для выходного сигнала системы;
 - преобразование Лапласа для входного сигнала;
- преобразование Лапласа для входного сигнала;
 - степенное выражение, отображающее начальные условия.
- степенное выражение, отображающее начальные условия.
Тогда введем 2 функции:
 =
= 
Она не зависит от управляющего воздействия и полностью определяется параметрами системы  и
и  .
.
 ;
;
 .
.
При начальных нулевых условиях передаточная функция задается отношением:

Степень знаменателя характеризует порядок системы. Для физически реализуемых систем  . Корни полинома числителя
. Корни полинома числителя  - это нули передаточной функции. Корни знаменателя
- это нули передаточной функции. Корни знаменателя  - это полюса передаточной функции.
- это полюса передаточной функции.
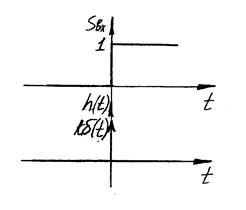
3.Импульсная характеристика – это реакция системы на единичный  -импульс.
-импульс.
 ;
;
 ;
;
 .
.
Иначе эту функцию можно найти через полюса:
 ;
;

 , при
, при  .
.
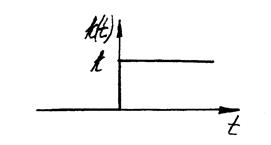
4. Переходная характеристика – это реакция системы на единичный скачок напряжения.
 ;
;  ;
;
 ;
;  .
.
5. Комплексный коэффициент передачи. Если на входе системы действует гармонический сигнал  :
:
 ;
;  ;
;  ;
;
 , при
, при  .
.
В установившемся режиме данный сигнал будет определяться следующей формулой:
 ,
,
т.е. в установившемся режиме сигнал на выходе линейной системы гармонический, частота которого равна частоте входного сигнала. Отношение гармонического сигнала на выходе в установившемся режиме к гармоническому сигналу на входе называется комплексным коэффициентом передачи или частотной характеристикой систем радиоавтоматики. Комплексный коэффициент передачи можно расписать на 2 составляющие  .
.
 - АЧХ;
- АЧХ;  - ФЧХ.
- ФЧХ.
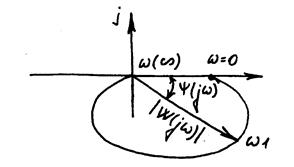
На плоскости комплексная переменная частотная характеристика изображается в виде вектора, который при изменении частоты  описывает кривую, называющуюся амплитудно-фазовой характеристикой или годографом частотной характеристики системы. Модуль вектора – значение АЧХ на соответствующей частоте, а угол отклонения от действительной оси – значение ФЧХ на соответствующей частоте.
описывает кривую, называющуюся амплитудно-фазовой характеристикой или годографом частотной характеристики системы. Модуль вектора – значение АЧХ на соответствующей частоте, а угол отклонения от действительной оси – значение ФЧХ на соответствующей частоте.
Динамические звенья системы радиоавтоматики.
При анализе элементов систем радиоавтоматики выясняется, что разнообразные элементы отличаются назначением конструкций, принципом действия и физическими процессами, происходящими в них, описываются одинаковыми дифференциальными уравнениями. Поэтому в теории управления выделяются элементарные динамические звенья, из которых может быть составлена любая система радиоавтоматики.
1. Безинерционное звено (пропорциональное, усилительное).
 ;
;  .
.
 ;
;  - АЧХ;
- АЧХ;  - ФЧХ.
- ФЧХ.
Примеры: усилитель в линейном режиме, делитель напряжения.
 ;
;  ;
;
Т.е. выходная величина копирует изменение входной величины без запаздывания, поэтому звено называется безинерционным.
Импульсная характеристика:
 - дельта импульс, площадью равный .
- дельта импульс, площадью равный .
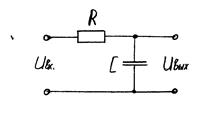
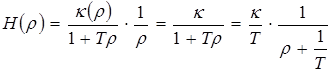
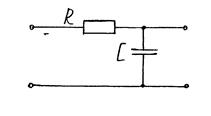
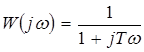
2. Инерционное (апериодическое) звено. Его передаточная функция:
 ;
;
- коэффициент передачи;
Т – постоянная времени.
Пример:  - цепочка.
- цепочка.
 ;
;  ;
;  ;
;
 - дифференциальное уравнение - цепи.
- дифференциальное уравнение - цепи.
 , тогда
, тогда  ;
;
 ;
;
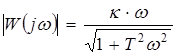
Комплексный коэффициент передачи этой цепи равен:
 ;
;  ;
;  .
.
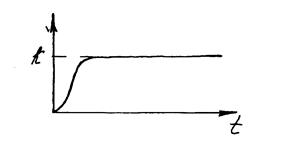
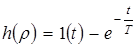
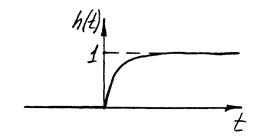
Переходная характеристика системы:
 ;
;  ;
;  ;
;
 ;
;
 .
.
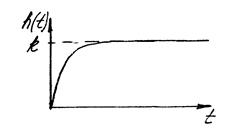
Чем больше , тем больше уровень сигнала в установившемся режиме. Чем больше постоянная времени  , тем длительнее процесс установления.
, тем длительнее процесс установления.
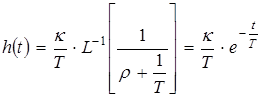
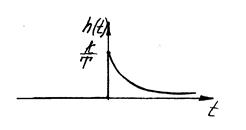
Импульсная характеристика данной цепочки:
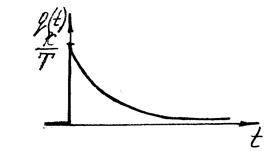
 ;
;
Примеры: исполнительные двигатели, усилители мощности, ФНЧ.
3.Колебательное звено.
Дифференциальное уравнение данного звена определяется:
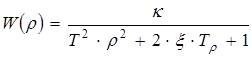 , где
, где  - коэффициент затухания.
- коэффициент затухания.
Примеры:  - контур, аксилирометр.
- контур, аксилирометр.
Колебательные звенья радиотехнических устройств имеют малое значение коэффициента затухания порядка 10-2. Колебательные звенья автоматических систем имеют коэффициент затухания близкий к 0.
Частотный коэффициент передачи этого звена равен:
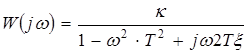 ;
; 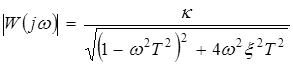 ;
;
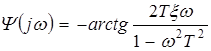 ;
;
Переходная характеристика системы:
 , где
, где
 - собственная резонансная частота системы.
- собственная резонансная частота системы.
 - декремент затухания.
- декремент затухания.
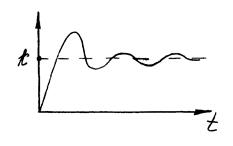
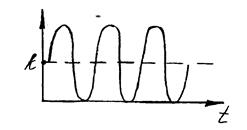
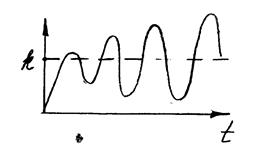
Характер переходной характеристики в зависимости от коэффициента затухания.
1. Если коэффициент затухания находится в интервале 0< <1, то переходная характеристика имеет вид затухающих колебаний.
2. Если  , тогда переходной процесс представляет собой незатухающее колебание.
, тогда переходной процесс представляет собой незатухающее колебание.
3. –1< <0, тогда переходная характеристика представляет собой возрастающие по амплитуде колебания.
4. Если >1, то переходная характеристика имеет монотонно нарастающий характер, а само звено может быть представлено как апериодическое звено второго порядка:
 .
.
4.Дифференцирующее звено.
 ;
;  .
.
 .
.
, выходное напряжение которого пропорционально частоте вращения его якоря.
Единственный реальный пример для дифференцирующего звена – тахогенератор 
Если в качестве входной величины взять не скорость вращения  , а угол поворота его якоря , тогда это выражение запишется:
, а угол поворота его якоря , тогда это выражение запишется:
 - АЧХ;
- АЧХ;  - ФЧХ.
- ФЧХ.
Переходная характеристика представляет собой выражение:

Реальные дифференцирующие устройства не являются идеальными и принадлежат к числу инерционно дифференцирующих звеньев, которые описываются дифференциальными уравнениями вида:
 ;
;  ;
;
 ;
; 
 ;
;  .
.
 ;
;  .
.
Переходная характеристика имеет вид:
 ;
;
 .
.
Пример: дифференцирующая - цепочка.
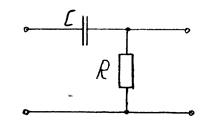
 ;
;  ;
;
 ;
;
 , при .
, при .
 ;
;  ;
;
5.Интегрирующее звено.
 ;
;  ;
; 
 ;
; 
АЧХ:  ; ФЧХ:
; ФЧХ:  ;
;
 ;
;  .
.
Пример: исполнительный двигатель следящей системы, характеризующийся следующим выражением:
 - угол поворота оси следящей системы;
- угол поворота оси следящей системы;
 - частота вращения якоря двигателя;
- частота вращения якоря двигателя;
 - коэффициент передачи редуктора.
- коэффициент передачи редуктора.
Реальные звенья чаще всего являются инерционными интегрирующими. Например, интегрирующая  - цепочка.
- цепочка.
 ;
;  ;
;  ;
;
 ;
;  ;
;
 ;
;
 ;
;  ;
;
АЧХ: 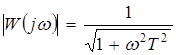 ;
;
ФЧХ:  .
.
 ;
;
 .
.
Интегрирующая - цепочка с точки зрения типовых звеньев радиоавтоматики является инерционным звеном с коэффициентом передачи  =1 и постоянной времени Т. По своим свойствам оно приближается к интегрирующим, когда Т оказывается существенно больше 1.
=1 и постоянной времени Т. По своим свойствам оно приближается к интегрирующим, когда Т оказывается существенно больше 1.
Дополнительные звенья.
1. Форсирующее звено.
Используется для коррекции динамических характеристик систем радиоавтоматики и представляет собой последовательное соединение безинерционного и дифференцирующего звеньев.
 , где
, где  ,
,  .
.
 ;
;
 .
.
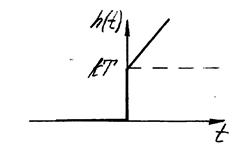
2. Изодробное звено.
 Параллельное соединение идеального интегрирующего и безинерционного.
Параллельное соединение идеального интегрирующего и безинерционного.
 Последовательное соединение интегрирующего и форсирующего.
Последовательное соединение интегрирующего и форсирующего.
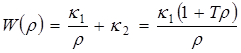 , где .
, где .
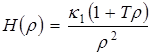 ;
;  .
.
Передаточные функции типовых соединений звеньев.
1. Последовательное соединение.
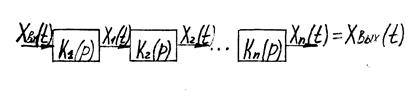
 ;
;
 ;
;
 .
.
2.Параллельное соединение.
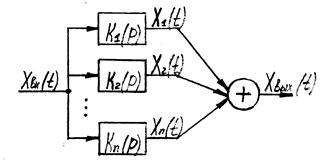
;
 ;
;
 ;
;

3.Обратная связь.
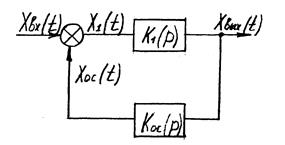
 ;
;
 ;
;
 ;
;
 ;
;
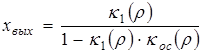 .
.
Условия устойчивости систем радиоавтоматики.
Для оценки систем необходимо найти решение дифференциального уравнения системы:
 .
.
Полное решение уравнения можно представить в виде суммы вынужденной и переходной составляющих:
 .
.
Вынужденная составляющая  является решением неоднородного уравнения и характеризует установившейся режим системы.
является решением неоднородного уравнения и характеризует установившейся режим системы.
Переходная составляющая является решением однородного дифференциального уравнения. Она имеет место в переходном режиме работы и представляет собой ошибку системы в переходном режиме и нежелательную составляющую управляемой величины. Система будет устойчивой, если переходная составляющая выходного сигнала с течением времени будет затухать.
 , при
, при 
Это означает, что если система выведена из состояния равновесия каким-либо возмущением, то она возвращается в исходное состояние после устранения этого возмущения. Если  представляет собой незатухающее колебание, то система находится на границе устойчивости. Если
представляет собой незатухающее колебание, то система находится на границе устойчивости. Если  возрастает по амплитуде колебания, то система неустойчива.
возрастает по амплитуде колебания, то система неустойчива.
Таким образом, для определения устойчивости необходимо выяснить характер изменения переходной составляющей решения, т.е. достаточно исследовать однородное уравнение замкнутой системы.
 .
.
В случае некратных корней переходная составляющая имеет вид:
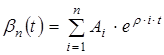 , где
, где
 - начальное значение
- начальное значение  - ой компоненты переходной составляющей;
- ой компоненты переходной составляющей;
 - - ый корень характеристического уравнения замкнутой системы;
- - ый корень характеристического уравнения замкнутой системы;
 - порядок уравнения замкнутой системы.
- порядок уравнения замкнутой системы.
Возможны 3 варианта корней замкнутой системы:
1. Корни вещественны. Если <0, то переходная составляющая  при . Если
при . Если  , то переходная составляющая с течением времени неограниченно возрастает.
, то переходная составляющая с течением времени неограниченно возрастает.
2. Система имеет пары комплексно – сопряженных корней.
 ;
;
 .
.
Если  <0, то переходная составляющая с течением времени затухает. Если
<0, то переходная составляющая с течением времени затухает. Если  , то переходная составляющая неограниченно возрастает.
, то переходная составляющая неограниченно возрастает.
3. Система имеет пару мнимых корней.
 ;
;
 .
.
Вывод: если все вещественные корни и все вещественные части комплексных корней отрицательные, т.е. находятся в левой полуплоскости комплексной плоскости корней, то переходная составляющая решения дифференциального уравнения системы со временем затухает, а сама система является устойчивой. Система не устойчива, если хотя бы один из вещественных корней больше 0. Система находится на границе устойчивости, если вещественная часть хотя бы одного корня равна 0, а вещественные части остальных корней отрицательные.
Корни характеристического уравнения не зависят от вида задающего воздействия и от начальных условий, а определяется только соотношением коэффициентов  , т.е. параметрами системы.
, т.е. параметрами системы.
Выражения для корней являются достаточно простыми только в случае, если система имеет порядок не выше второго. Нахождение корней уравнения более высокого порядка задача сложная и в некоторых случаях практически невозможная. Поэтому были разработаны критерии устойчивости, позволяющие судить об устойчивости системы непосредственно по коэффициентам характеристического уравнения без вычисления корней.
Критерии устойчивости систем радиоавтоматики.
1.Необходимый критерий устойчивости: положительность всех коэффициентов характеристического уравнения. Если хотя бы один из коэффициентов меньше 0, то система радиоавтоматики неустойчива. Если критерий выполняется, то требуются дополнительные исследования устойчивости системы по достаточным критериям устойчивости.
2.Достаточный критерий устойчивости.
2.1.Критерий устойчивости Гурвица. Чтобы система радиоавтоматики была устойчива с характеристическим уравнением

необходимо и достаточно, чтобы при  >0 все - определители матрицы Гурвица были больше 0.
>0 все - определители матрицы Гурвица были больше 0.
Порядок составления матрицы Гурвица:
1.По главной диагонали выписываются коэффициенты уравнения в порядке возрастания индексов, начиная с  до
до  включительно.
включительно.
2.Столбцы вверх по диагонали дополняются коэффициентами с возрастающими индексами, а вниз от диагонали с убывающими индексами. Места недостающих коэффициентов заполняются 0.
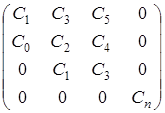
Для оценки устойчивости системы радиоавтоматики необходимо вычислить определители Гурвица, которые получились из матрицы путем вычеркивания равного числа строк и столбцов.
 ;
;
Система устойчива, если все определители  >0. Если какой-либо из определителей равен 0, то система находится на границе устойчивости, а коэффициент, соответствующий границе устойчивости, называющийся критическим, равен 0.
>0. Если какой-либо из определителей равен 0, то система находится на границе устойчивости, а коэффициент, соответствующий границе устойчивости, называющийся критическим, равен 0.
Пример: оценить устойчивость системы и найти критический коэффициент уси
Дата добавления: 2020-10-25; просмотров: 276;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
