Разомкнутые системы радиоавтоматики
Системы радиоавтоматики
Системы радиоавтоматики – это автоматические системы, входящие в состав радиотехнических устройств и систем радиоуправления, в которых осуществляется обработка параметров радиосигналов при действии различного вида помех.
Примеры систем радиоавтоматики:
1. Система фазовой автоподстройки (ФАПЧ)
2. Системы АРУ (автоматическая регулировка усиления)
3. Система измерения координат движущихся объектов
4. Измерители дальности
Любая автоматическая система содержит:
1. Объект управления
2. Сигнал управления (  ), формируемый в устройстве управления
), формируемый в устройстве управления
3. Задающее устройство, вырабатывающее задающее воздействие (  ).
).
 |
 - выходной сигнал системы,
- выходной сигнал системы,
 - возмущающее (помеховое) воздействие.
- возмущающее (помеховое) воздействие.
Рассмотрим примеры:
1. ФАПЧ:
ОУ – генератор
- частота выходного сигнала
 - частота входного сигнала
- частота входного сигнала
Частота выходного сигнала генератора автоматически поддерживается на заданном уровне, определенном частотой входного сигнала.
2. Системы автоматического сопровождения цели
ОУ – электромеханическое устройство антенн РЛС, продольная ось которой автоматически следует за направлением на сопровождаемую цель.
- угол отклонения продольной оси антенны от выбранного направления отсчета углов.
- выходной сигнал антенны в режиме приема РЛС.
Выходной сигнал называют регулируемым. Он измеряется с помощью специальных датчиков. может отклоняться от требуемого значения по следующим причинам:
1. Внутренние причины: шумы измерения, обусловленные конечной чувствительностью системы.
2. Внешние факторы: окружающая среда (температура, давление), колебание напряжений источников питания.
Вводится понятие канала управления объектом (КУ) и канал возмущения объектом (КВ).
 |
В зависимости от принципа формирования управления воздействия различают:
1. Разомкнутые системы (принцип управления по возмущению и по задающему воздействию).
2. Замкнутые системы (принцип управления по отклонению управления величины от требуемого значения).
3. Комбинированные системы.
Разомкнутые системы радиоавтоматики
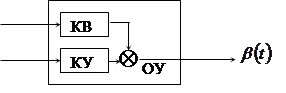
1. Принцип управления по задающему воздействию.
В таких системах сигнал управления зависит только от управления воздействия .
Используется для уменьшения отклонения управляемые величины от требуемого значения в связи с инерционностью объекта, т.е. когда не успевает следовать за . В устройстве управления обеспечивается функциональное преобразование таким образом, чтобы уменьшить время проходного процесса в объекте управления. Например, управляющее воздействие  .
.
 |
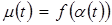
2. Принцип управления по возмущению
 |
Задача системы: компенсация влияния возмущающего действия на управляемую величину.
В устройстве управления измеряется возмущающее воздействие с помощью измерительного элемента ИЭ, который преобразуется в управляющее воздействие преобразователя П, а затем складывается с задающим воздействием. () поступает на усилитель-преобразователь УП, где усиливается до необходимой величины, обеспечивающей требуемый режим работы. Затем по каналу управления КУ поступает на объект управлением, а по каналу возмущения КВ поступает возмущающее воздействие , компенсируемое в объекте управления.
Точность компенсации зависит от:
1.Точности знания характеристик объекта;
2.Точности измерения самого возмущающего воздействия.
Достоинства разомкнутых систем радиоавтоматики:
1.Теоретическая возможность полной компенсации возмущающих воздействий;
2.Всегда устойчивы.
Недостатки разомкнутых систем радиоавтоматики:
1.Устраняют влияние лишь основных возмущающих воздействий, по которым созданы компенсационные каналы;
2.Возможно появление отклонения при измерении характеристик объекта управления и устройства управления в процессе эксплуатации;
3.Ограниченное применение только для объектов, характеристики которых точно известны.
Замкнутые системы радиоавтоматики
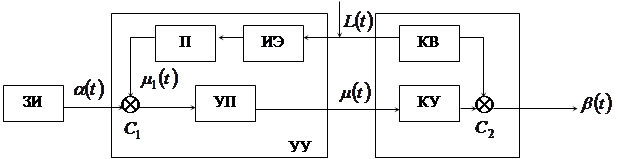
Их действие основано на принципе управления по отклонению, то есть выходной сигнал, управляемый, измеряется и сравнивается с требуемым значением (задающим воздействием) и в соответствии с найденным отклонением формируется управляющее воздействие, которое при подаче на объект стремиться уменьшить или устранить это отклонение.
П - преобразователь-корректирующее устройство;
У - усилитель;
ЭС - элемент сравнения;
ЭОС - элементы обратной связи;
ИЭ - измерительный элемент.
=f[  ];
];

Управляющее воздействие является функцией задающего воздействия L(t) и выходного сигнала.
Замкнутая система менее чувствительная, чем разомкнутая к изменению внутренних параметров элементов, так как влияние этих изменений также компенсируется при реализации управления по отклонению.
Достоинства:
1.Компенсация влияния внутренних и внешних факторов;
2.Во многих случаях замкнутые системы проще разомкнутых систем с управлением по возмущению;
3.Они применимы для объектов управления, точные характеристики и параметры которых определить невозможно.
Недостатки:
1.Проблема устойчивости;
2.Управление объектом идет с задержкой по времени, поэтому оно не позволяет полностью устранить отклонение.
Дата добавления: 2020-10-25; просмотров: 198;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
