Моностабильные пневмораспределители
Пневмораспределители, которые переключаются в нормальную позицию посредством возвратных пружин, называют моностабильными. Нормальное для данной конструкции состояние – нейтральная (исходная) позиция.
На рис. 8, представлена конструкция моностабильного нормально закрытого 2/2-пневмораспределителя с механическим управлением.
Рисунок8. Нормально закрытый 2/2-пневмораспределитель с механическим управлением
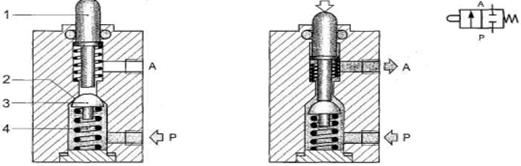
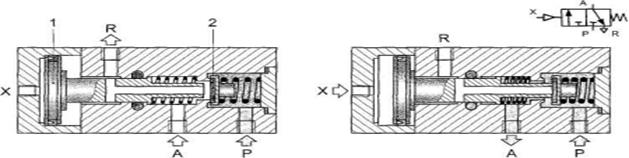
В исходной позиции запорно-регулирующий элемент 3 пневмораспределителя, выполненный в виде полусферы, под действием пружины 4 и давления питания прижат к седлу 2, перекрывая тем самым подачу сжатого воздуха в канал потребителя А, — т. е. пневмораспределитель нормально закрыт. При наличиивнешнего управляющего воздействия, величина которого должна быть достаточной для преодоления усилия от возвратных пружин и давления, действующего на клапан 3, толкатель 1 снимает клапан-3 с седла 2, и пневмораспределитель занимает позицию, в которой каналы питания Р и потребителя А сообщаются между собой. На рис. 9 изображены два варианта конструктивного исполнения нормально закрытого 3/2-пневмораспределителя с механическим управлением. Отличие между ними заключается в том, что в одном (рис. 9, б) заложена возможность подсоединения к линии выхлопа R (например, можно ввернуть глушитель), а в другом (рис. 9, а) это действие осуществить нельзя.
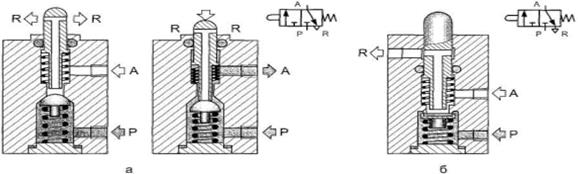
Рис. 9. Нормально закрытые 3/2-пневмораспределители с механическим управлением
Такое различие находит отражение в условном графическом обозначении пневмораспределителей: если исключена возможность подсоединения к отверстию выхлопа, то треугольник, указывающий на сброс воздуха в атмосферу, примыкает вплотную к обозначению пневмораспределителя; в противном случае он отделяется от последнего вертикальной чертой.
Оба пневмораспределителя срабатывают в два этапа: при движении толкателя в момент его контакта с клапаном перекрывается выполненный в нем канал выхлопа, и только при дальнейшем движении соединяются каналы питания Р и потребителя А.
Примерно по такой же схеме работает и нормально открытый 3/2-пневмораспределитель (рис. 10).
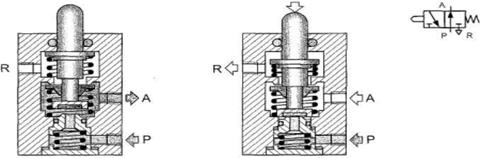
Рисунок 10. Нормально открытый 3/2-пневмораспределитель с механическим управлением
Данная конструкция имеет два дисковых клапана, причем в исходном состоянии верхний отсекает канал выхлопа R, а через открытый нижний воздух протекает из канала питания Р к потребителю через канал А.
Движение толкателя вниз сопровождается двухступенчатым срабатыванием пневмораспределителя. На первой ступени нижний клапан, жестко связанный с толкателем, опускается на подпружиненное седло, перекрывая подачу сжатого воздуха. Верхний клапан, в свою очередь, остается поджатым к своему седлу вплоть до момента контакта с буртиком толкателя. Только после этого в результате дальнейшего совместного движения толкателя с нижним клапаном и его седлом верхний клапан открывается, и устанавливается соединение потребителя с выхлопом (вторая ступень).
Альтернативой сложным по конструктивному исполнению распределителям клапанного типа являются золотниковые распределители.
Принадлежность к классу аппаратов клапанного или золотникового типов не находит отражения в условном графическом обозначении пневматических распределителей, хотя эти типы аппаратуры существенно различаются по функциональным возможностям.
Так, 3/2-пневмораспределитель золотникового типа (рис. 11) можно использовать и как нормально закрытый (индексация каналов, поясняющая схему коммутации, дана без скобок), и как нормально открытый (индексация дана в скобках).
Рисунок 11. Нормально закрытый 3/2-пневмораспределитель золотникового типа с механическим управлением
Подача сжатого воздуха в каналы Р или R не приводит к возникновению на золотнике усилий, вызывающих его смещение из нормальной позиции, т. к. и в том, и в другом случаях золотник остается гидравлически разгруженным.
Если попытаться использовать нормально закрытый пневмораспределитель клапанного типа (см. рис. 10) как нормально открытый (путем подачи сжатого воздуха в канал R), то в этом случае произойдет самопроизвольное открытие клапана и воздух начнет поступать во все каналы одновременно.
Обычно пневмораспределители, в конструкции которых заложена возможность использования их в качестве нормально открытых или нормально закрытых, имеют два альтернативных обозначения на бирке которой производители снабжают каждый аппарат.
Золотниковые распределители, как правило, позволяют пропускать через себя воздух и в обратном направлении — из канала А в канал R или (при переключении) Р. Когда на принципиальной пневматической схеме важно отразить данное свойство золотникового распределителя, стрелки на его условном графическом обозначении, показывающие пути потока воздуха, изображают двусторонними.
В тех случаях, когда сжатый воздух подается к исполнительным механизмам непосредственно от пневмораспределителей с механическим или ручным управлением, говорят о прямом управлении (рис. 12).
Рисунок 12. Прямое управление пневмоцилиндрами

Пневмораспределители, управляющие исполнительными механизмами, также называют исполнительными.
Пневматическое управление распределителями используют в тех случаях, когда необходимо осуществлять дистанционное управление их работой. Чтобы распределитель был с пневматическим управлением, в конструкцию вводят поршень 1, перемещение которого и приводит в движение запорный элемент 2 (рис. 13).
Рисунок 13. Нормально закрытый 3/2-пневмораспределитель с пневматическим управлением
Рассмотрим схему управления пневмоцилиндром одностороннего действия с использованием распределителя с пневматическим управлением (рис. 14).
Рисунок14. Непрямое управление пневмоцилиндром одностороннего действия
(исполнительный распределитель — нормально закрытый)
В предложенной схеме пневмораспределитель с ручным управлением (пневмокнопка) управляет работой пневмоцилиндра путем подачи сигнала на исполнительный распределитель с пневматическим управлением.
Схема несколько видоизменится, если исполнительный пневмораспределитель будет нормально открытым (рис. 15).
Рисунок15. Непрямое управление пневмоцилиндром одностороннего действия
(исполнительный распределитель — нормально открытый)
В моностабильных пневмораспределителях возврат запорно-регулирующего элемента в исходное положение может осуществляться не только посредством механических пружин, но и под действием давления сжатого воздуха (пневматической пружины) (рис. 16).
Рисунок 16. 5/2-пневмораспределитель с пневматическим управлением и возвратом
В исходной позиции золотник 2 находится в крайнем левом положении, т. к. на его правый поршень 4 через специальный канал 3, связанный с линией питания, подается сжатый воздух. При поступлении управляющего сигнала в канал Y золотник 2 сместится вправо, поскольку площадь левого поршня 1 значительно больше площади правого поршня 4.
В некоторых конструкциях возврат ЗРЭ в исходную позицию осуществляется под действием одновременно и механической, и пневматической пружин. Такое сочетание обеспечивает более высокую стабильность и надежность переключения пневмораспределителя.
В тех случаях, когда имеются технологические ограничения на величину управляющих сигналов, применяют распределители с пневматическим усилением управляющего сигнала (пилотным управлением) (рис. 17).
Рисунок 17. 3/2-пневмораспределитель с пневматическим усилением управляющего сигнала
В таких конструкциях (в данном случае это путевой выключатель) усилие переключения прикладывается к небольшому вспомогательному (пилотному) распределителю 2, функцией которого является подача пневматического сигнала управления на основной пневмораспределитель 3, непосредственно осуществляющий коммутацию внешних пневмолиний. Поскольку площадь клапана пилотного распределителя невелика, то усилие, необходимое для переключения последнего, минимально.
Рассмотренная конструкция позволяет трансформировать нормально закрытый пневмораспределитель в нормально открытый. Для этого надо развернуть управляющую головку с роликом 1 на 180° и подавать сжатый воздух в канал R.
В тех случаях, когда требуется контролировать какой-либо объект при его движении только в определенном направлении, применяют распределители с управлением от «ломающегося» рычага с роликом (рис. 18).
Рисунок 18. Принцип действия «ломающегося» рычага с роликом
Конструкция рычага выполнена таким образом, что он воздействует на толкатель пневмораспределителя только в том случае, если движение штока пневмоцилиндра или другого контролируемого объекта происходит в определенном направлении (рис. 18, а). Пневмораспределитель не срабатывает при движении объекта в противоположном направлении, поскольку рычаг с роликом проворачивается на оси ( «ломается») и не передает управляющее воздействие на толкатель (рис. 18, б).
Управление сложными объектами с пневматическими приводами базируется преимущественно на электрических и электронных системах, имеющих широкие возможности сбора, обработки информационных и формирования управляющих электрических сигналов, и высокое быстродействие. Независимо от элементной базы управляющих систем (релейно-контактная или микропроцессорная техника), в силовой части привода применяют пневматические распределители с электромагнитным управлением. Работа подобных пневмораспределителей основывается на свойстве находящихся под напряжением электромагнитных катушек втягивать расположенный в них якорь.
Запорно-регулирующий элемент в таких аппаратах располагают непосредственно на торцах якоря, который помещается в гильзу, ввинченную в корпус. Снаружи гильза охватывается приводной электромагнитной катушкой (рис. 19).
Рисунок 19 3/2-пневмораспределитель с электромагнитным управлением и ручным дублированием
Если электромагнитная катушка 7 обесточена, якорь 5 прижат пружиной 4 к седлу клапана 3, перекрывая канал Р, по которому подводится сжатый воздух; выходной канал А соединен с атмосферой через пазы на наружной поверхности якоря. Напряжение на катушку 7 подается через присоединительный элемент — коннектор 8, при этом якорь 5, преодолевая усилие пружины 4, поднимается до седла клапана 6, закрывая канал R выхода воздуха в атмосферу и открывая канал, соединенный с отверстием для подведения сжатого воздуха. Сжатый воздух подается в линию потребителя (канал А).
Пневмораспределители с электромагнитным приводом имеют, как правило, ручное дублирование, используемое обычно при пусконаладочных работах или при поиске отказа (если распределитель срабатывает от элемента ручного управления, это свидетельствует о том, что не работает катушка). Включают пневмораспределитель нажатием или проворотом специального устройства (рис, 19, поз.1) механически поднимающего якорь с седла клапана. После проверки работоспособности распределителя элемент ручного управления необходимо выставить в положение не препятствующее свободному перемещению якоря.
К моностабильным пневмораспределителям, относится большое число трехпозиционных распределителей. Обычно нормальной для них является средняя позиция, в которую они выставляются посредством двух пружин, центрирующих их запорно-регулирующий элемент. Так, используя 5/3-пневмораспределитель с двусторонним пневматическим управлением и закрытой центральной позицией, можно обеспечить останов пневмоцилиндра в любом промежуточном положении (рис. 20).
Рисунок20. Использование 5/3-пневмораспределителя для позиционирования пневмоцилиндров
При нажатии на одну из пневмокнопок, например 1.3, шток цилиндра 1.0 начнет перемещаться, а при отпускании ее он остановится, поскольку исполнительный распределитель 1.1 займет центральную позицию, в которой все линии перекрыты (при этом точность позиционирования цилиндра будет достаточно низкой).
На принципиальных пневмосхемах условному графическому обозначению каждого пневмоустройства присваивают буквенно-цифровое позиционное обозначение по ГОСТ 2.704-76) или (в зарубежных схемах) цифровой индекс, формируемый по определенным правилам (табл.2).
Таблица 2. Цифровая индексация пневматических устройств
| Наименование устройства | Индекс |
| Аппаратура подготовки сжатого воздуха | 0.1, 0.2, 0.3… |
| Исполнительные механизмы (ИМ) | 1.0, 2.0, 3.0… |
| Исполнительные распределители | 1.1, 2.1, 3.1… |
| Устройства, подающие сигналы на выдвижение штока цилиндра (после точки — четное число) | 1.2, 1.4, 1.6, … (для 1-го ИМ) 2.2,2.4,2.6, … (для 2-го ИМ) |
| Устройства, подающие сигналы на втягивание штока цилиндра (после точки — нечетное число) | 1.3, 1.5, 1.7, … (для 1-го ИМ) 2.3,2.5,2.7, … (для 2-го ИМ) |
| Регуляторы скорости и устройства, расположенные между исполнительными механизмами и исполнительными распределителями (будут рассмотрены ниже) | 1.01, 1.02, … 2.01,2.02, … |
Индексы всех элементов, управляющих исполнительным механизмом 1.0, начинаются с цифры 1, управляющих исполнительным механизмом 2.0 — с цифры 2 и т. д. Это означает, что где бы «территориально» на схеме ни располагался элемент, (например, 1.10), он будет находиться в ветви управления соответствующим исполнительным механизмом (в нашем случае — 1.0).
В тех случаях, когда невозможно придерживаться правила использования четных и нечетных цифр после точки в зависимости от типа команды (втягивание или выдвижение штока цилиндра), применяют сквозную индексацию.
Дата добавления: 2020-07-18; просмотров: 1905;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
