ЗАДАЧИ К КОНТРОЛЬНЫМ ЗАДАНИЯМ
СТАТИКА
Задача С1
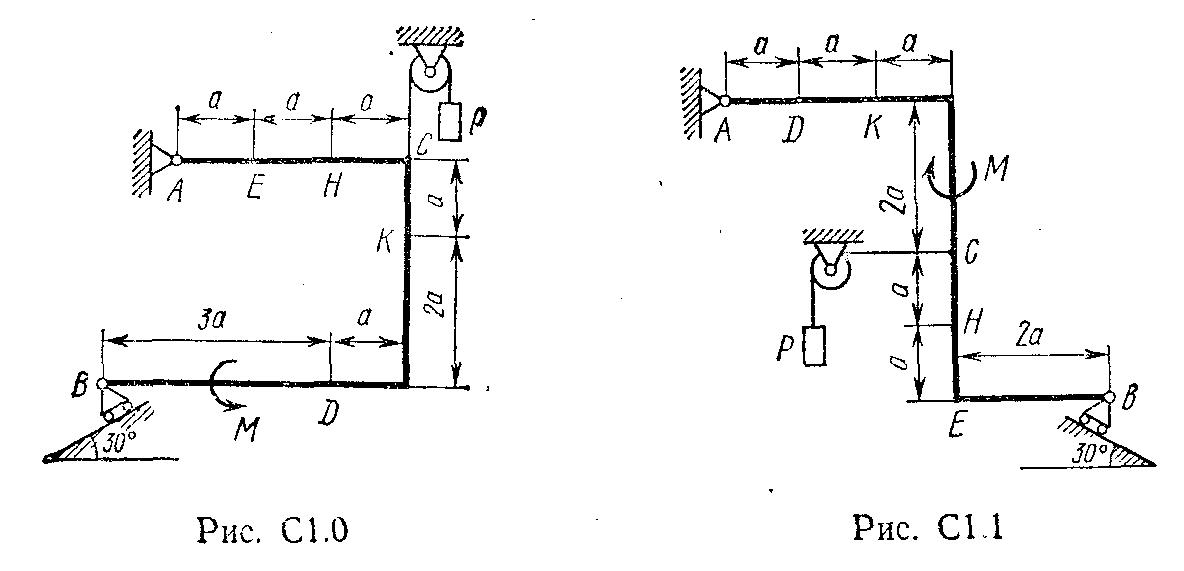
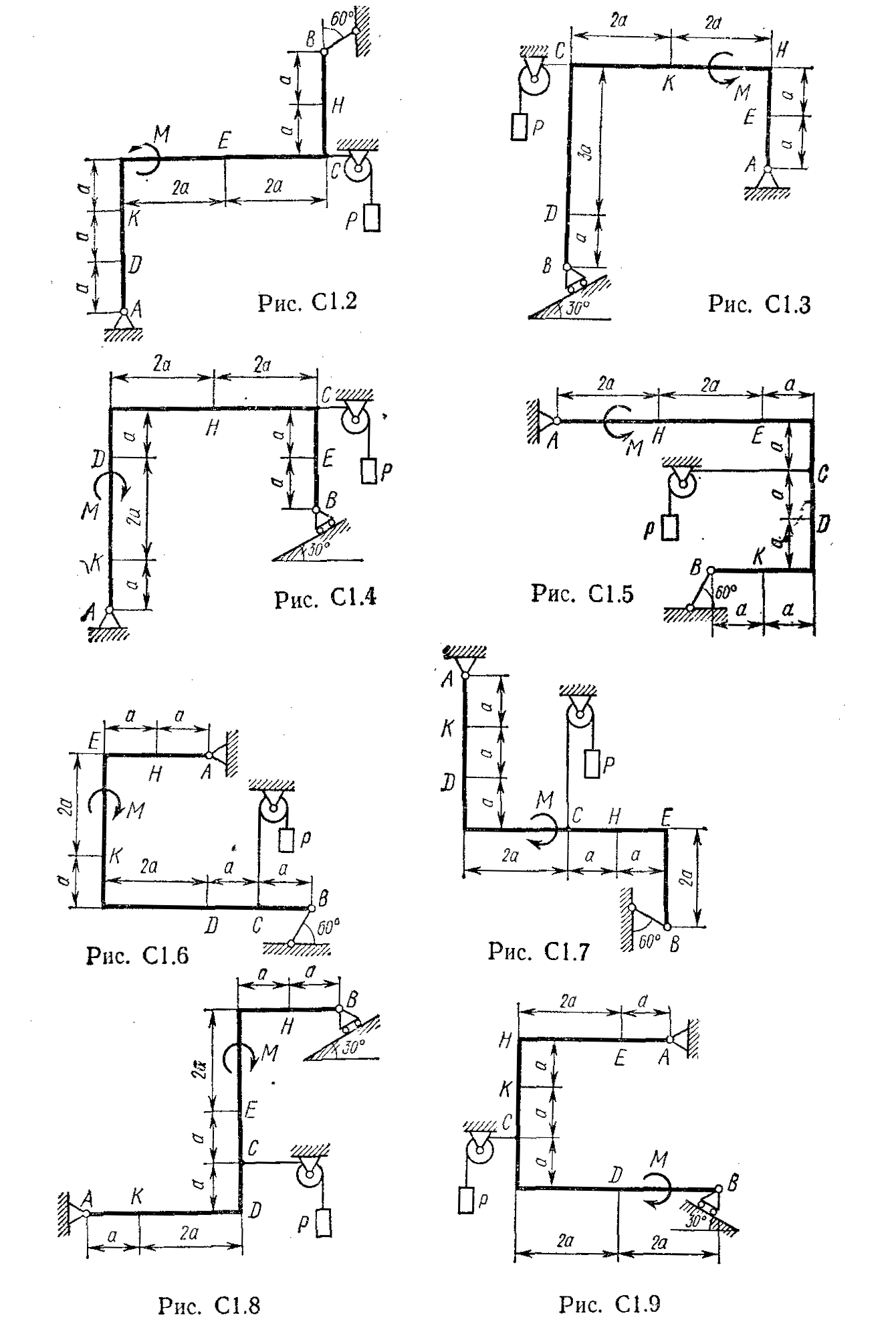
Жесткая рама (рис. С1. 0—С1.9, табл. С1) закреплена в точке А шарнирно, а в точке В прикреплена или к невесомому стержню с шарнирами на концах, или к шарнирной опоре на катках.
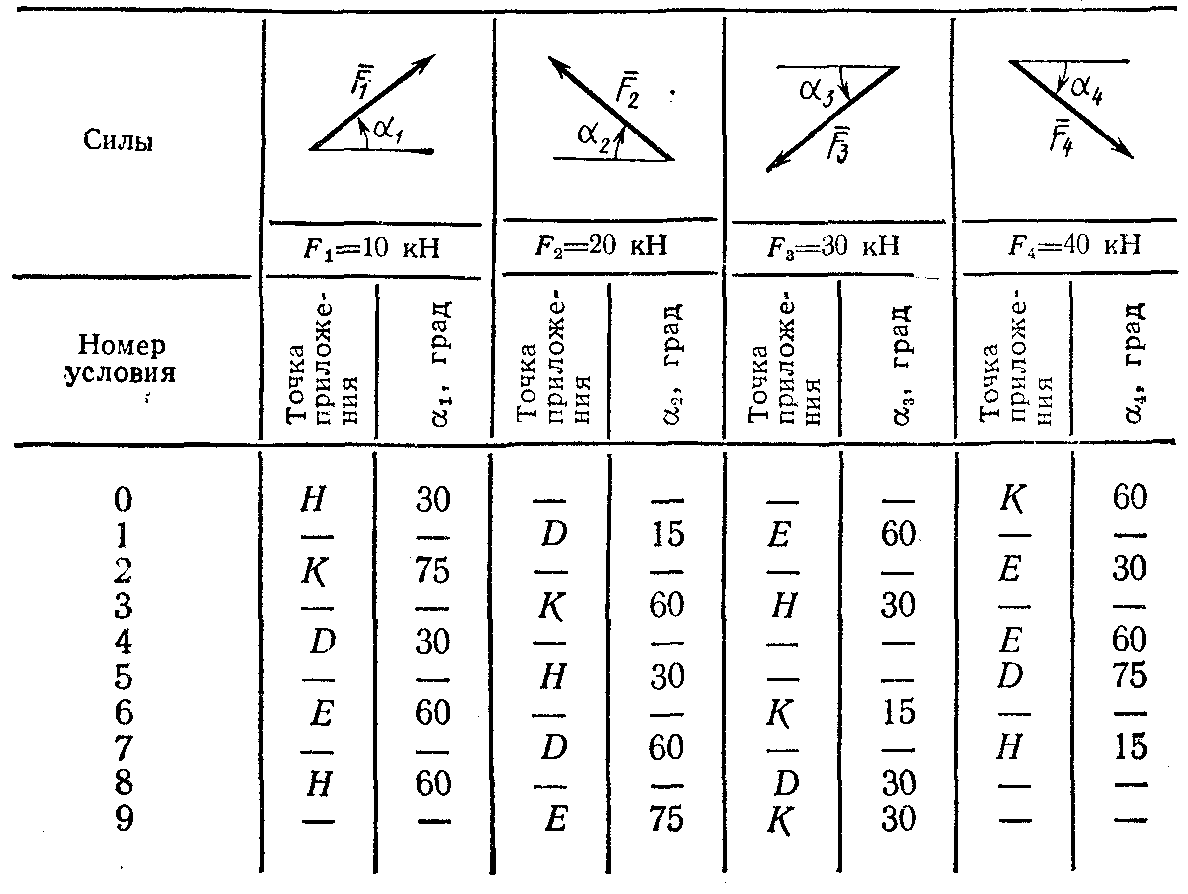
В точке С к раме привязан трос, перекинутый через блок и несущий на конце груз весом Р=25 кН. На раму действует пара сил с моментом М=60 кН-м и две силы, значения, направления и точки приложения которых указаны в таблице (например, в условиях № 1 на раму действуют сила F2 под углом 15° к горизонтальной оси, приложенная в точке D, и сила F3 под углом 60° к горизонтальной оси, приложенная в точке Е и т.д.).Определить реакции связей в точках А, В, вызываемые действующими нагрузками. При окончательных расчетах принять а=0,5 м.
Указания. Задача С1 - на равновесие тела под действием произволь- ной плоской системы сил. При ее решении учесть, что натяжения обе- их ветвей нити, перекинутой через блок, когда трением пренебрегают,
| Таблица С1 |
связей. При вычислении момента силы F часто удобно разложить
ее на составляющие F' и F", для которых плечи легко определяют-
ся, и воспользоваться теоремой Вариньона; тогда mo( F ) = mo( F' ) +
+ mo( F" ).
| Рис.С1.0 |
| Рис.С1.1 |
| Рис.С1.8 |
| Рис.С.1.4 |
| Рис.С1.7 |
| Рис.С1.4 |
| Рис.С1.2 |
| Рис.С1.6 |
| Рис.С1.2.2 |
| Рис.1.4 |
| Рис.1.6 |
| Рис.С1.9 |
| Рис.С1.5 |
| Рис.1.7 |
| Рис.1.5 |
| Рис.С1.3 |
| Рис.С.1.3 |
Задача С2
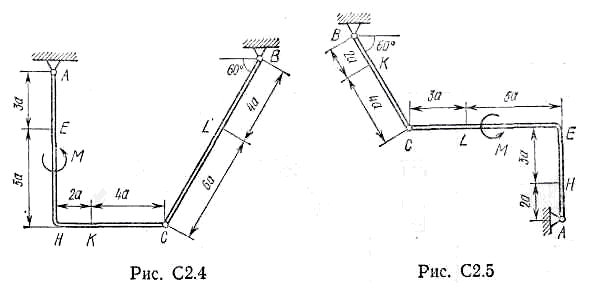
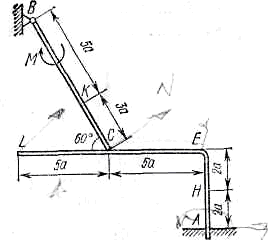
Конструкция состоит из жесткого угольника и стержня, которые в точке С или соединены друг с другом шарнирно (рис.С2.0-С2.5),или свободно опираются друг о друга (рис С2.6-С2.9).Внешними связями,наложенными на конструкцию, являются в точке А или шарнир, или жесткая заделка; в точке В или невесомый стержень ВВ(рис.0 и1),или гладкая плоскость (рис.2 и 3),или шарнир (рис.4-9); в точке D или невесомый стержень DD (рис.1,2,7), или шарнирная опора на катках (рис. 9).
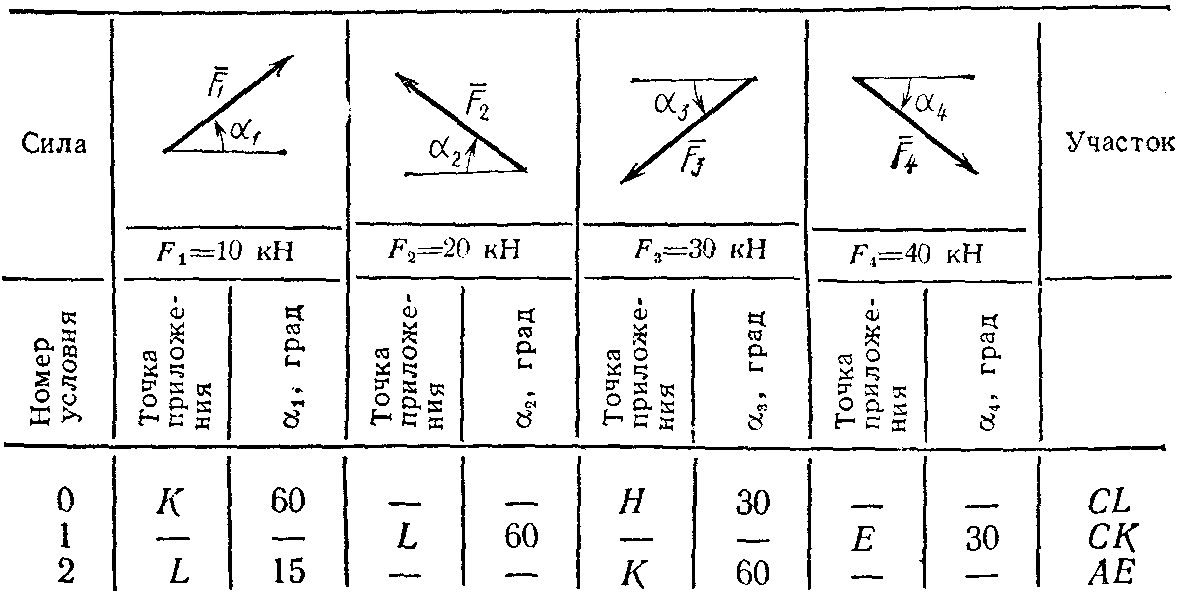
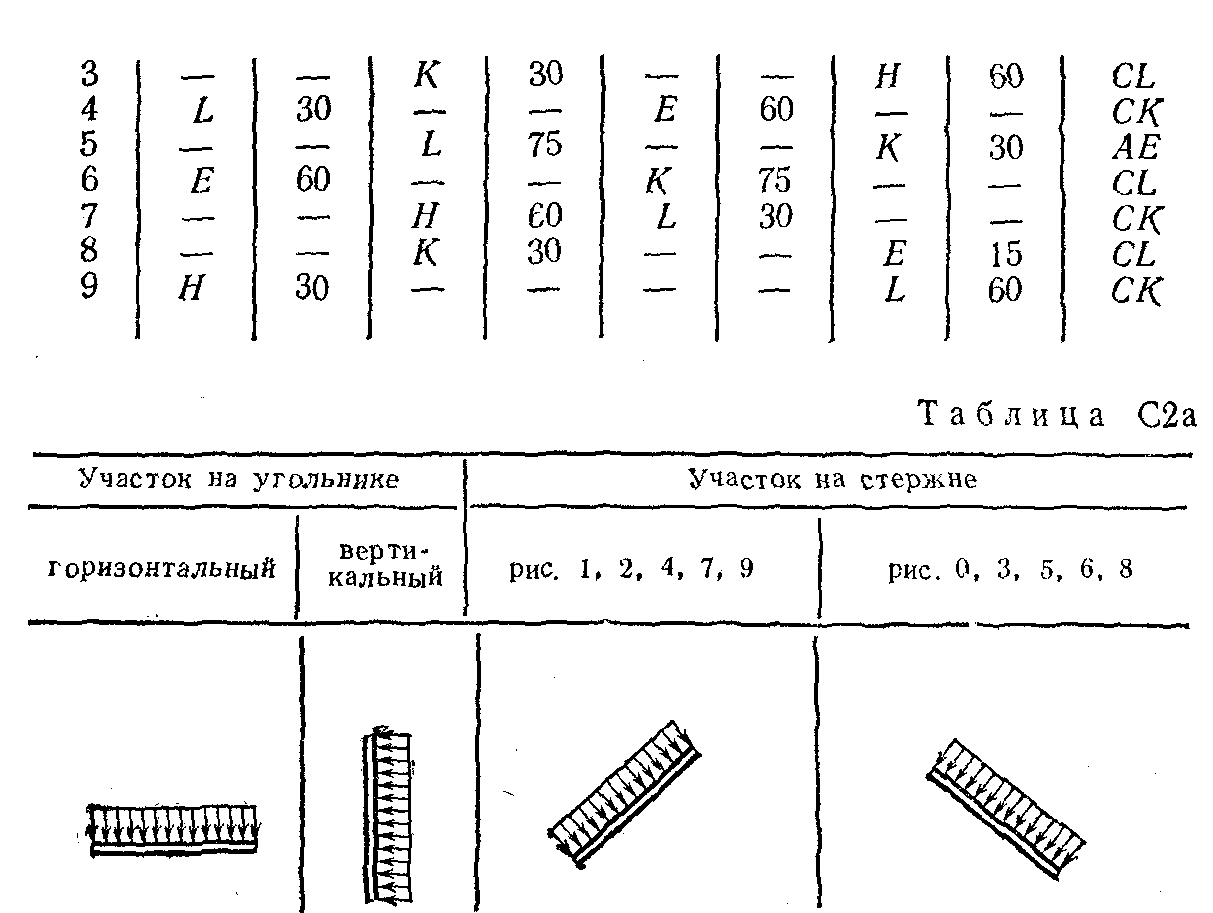
На каждую конструкцию действуют: пара сил с моментом М — = 60 кН·м, равномерно распределенная нагрузка интенсивности q= =20 кН/м и еще две силы. Эти силы, их направления и точки приложения указаны в табл. С2; там же в столбце «Участок» указано, на каком участке действует распределенная нагрузка (например, в условиях № 1 на конструкцию действуют сила F2 под углом 60° к горизонтальной оси, приложенная в точке L, сила F4 под углом 30° к горизонтальной оси, приложенная в точке Е, и нагрузка, распределенная на участке СК.
Определить реакции связей в точках А, В, С (для рис. 1,2,7,9, еще и в точке D), вызванные заданными нагрузками. При окончательных расчетах принять а=0,2 м. Направление распределенной нагрузки на различных по расположению участках указано в табл. С2а.
Указания. Задача С2—на равновесие системы тел, находящихся под действием плоской системы сил. При ее решении можно или: рассмотреть сначала равновесие всей системы в целом, а затем— равновесие одного из тел системы, изобразив его отдельно, или же сразу расчленить систему и рассмотреть равновесие каждого из тел в отдельности, учтя при этом закон о равенстве действия и противо-действия. В задачах, где имеется жесткая заделка, учесть, что ее реакция представляется силой, модуль и направление которой неиз-вестны, и парой сил, момент которой тоже неизвестен.
Таблица С2
| 1 2 3 4 5 6 7 8 9 10 |
| 1 2 3 4 5 6 7 8 9 10 |
| Окончание табл.С2 |
| Рис. С2.3 |
| Рис. С2.2 |
| Рис. С2.1 |
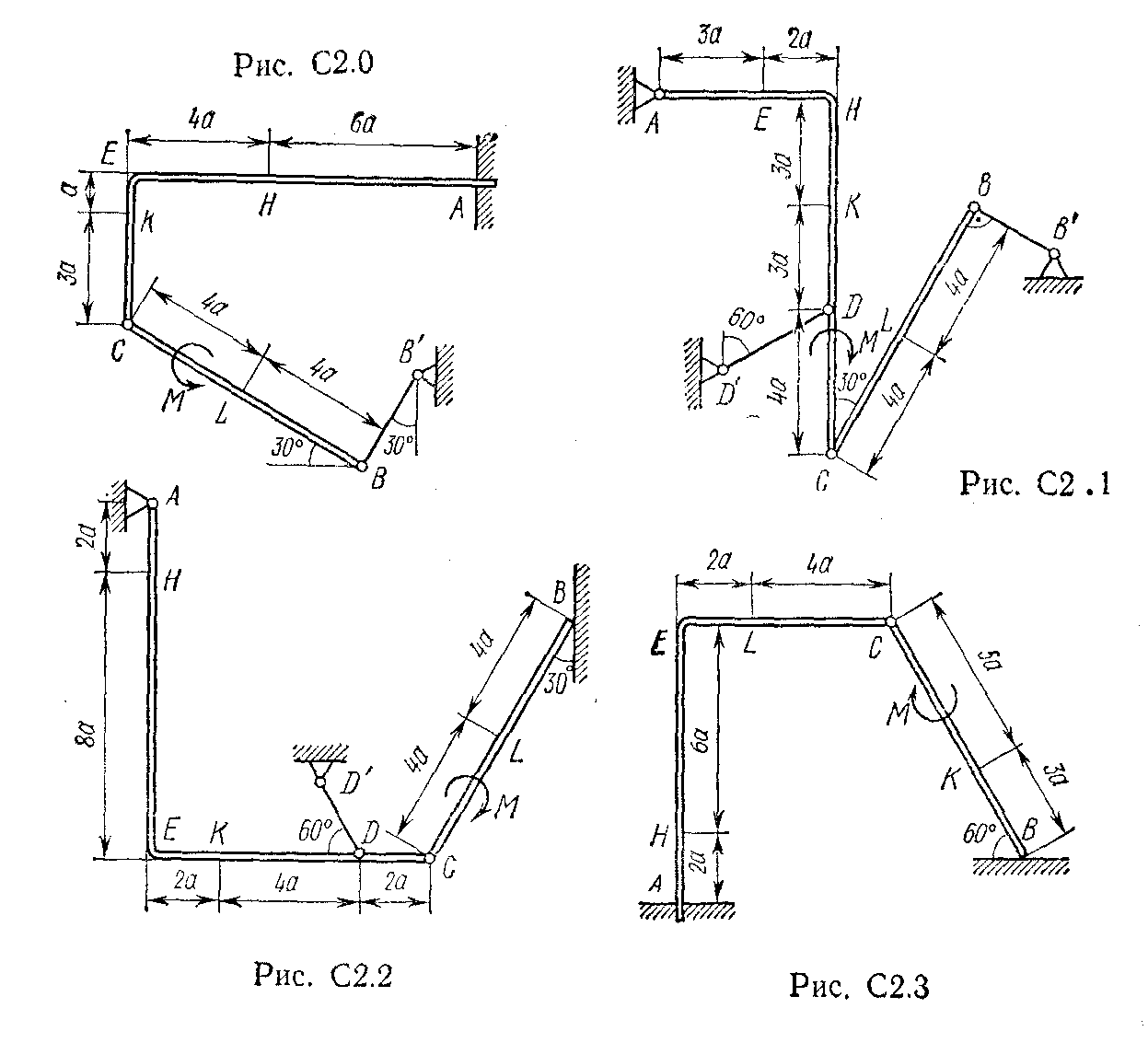
| Рис. С2.0 |
|
|
|
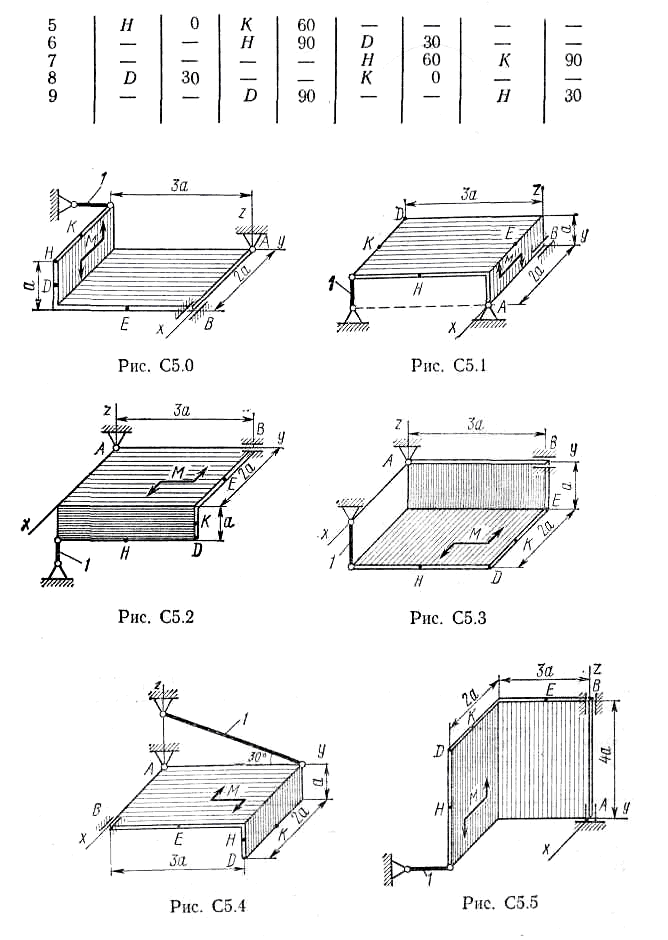
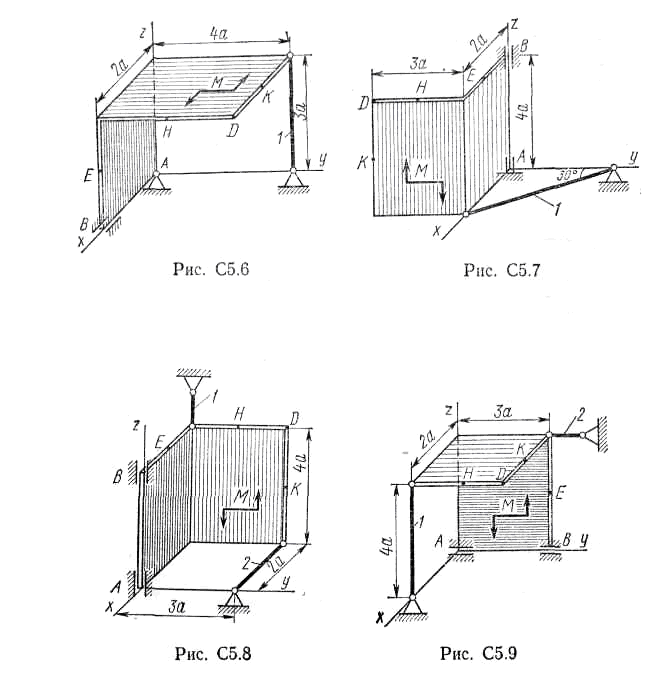
Задача С5
Две однородные прямоугольные тонкие плиты жестко соединены (сва
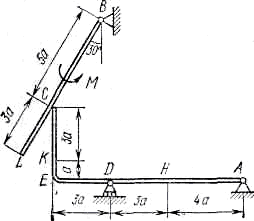
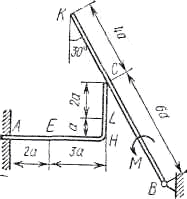
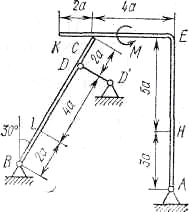
рены) под прямым углом друг к другу и закреплены сферическим шарни- ром (или подпятником) в точке А, цилиндрическим шарниром (подшипни- ком) в точке В и невесомым стержнем / (рис. С5.0—С5.7) или же двумя подшипниками в точках А и В и двумя невесомыми стержнями 1 и 2 (рис. С5.8, С5.9); все стержни прикреплены к плитам и к неподвижным опо- рам шарнирами.
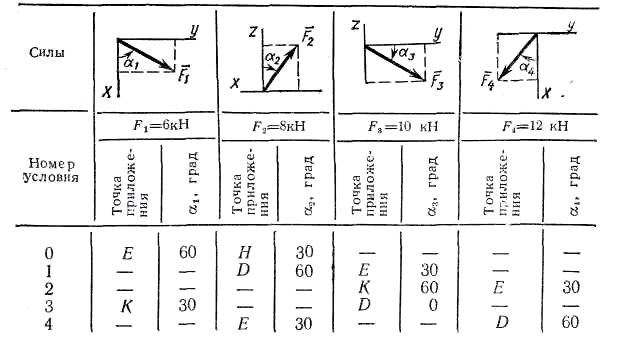
Размеры плит указаны на рисунках; вес большей плиты P1 = 5 кН, вес меньшей плиты Р2=3 кН. Каждая из плит расположена параллельно одной из координатных плоскостей (плоскость ху горизонтальная).На пли- ты действуют пара сил с моментом М=4 кН-м, лежащая в плоскости од- ной из плит, и две силы. Значения этих сил, их направления и точки при- ложения указаны в табл. С5; при этом силы F1 и F4 лежат в плоскостях, параллельных плоскости ху, сила F2— в плоскости, параллельной ху, и сила F3 в плоскости, параллельной уz. Точки приложения сил (D, Е, Н, К) находятся в углах или в серединах сторон плит.
. Определить реакции связей в точках А и В и реакцию стержня (стерж- ней). При подсчетах принять а= 0,6 м
Указания. Задача С5 — на равновесие тела под действием произволь--ной пространственной системы сил. При ее решении учесть, что реакция сферического шарнира (подпятника) имеет три составляющие (по всем трем координатным осям), а реакция цилиндрического шарнира (подшип- ника)—две составляющие, лежащие в плоскости, перпендикулярной оси шарнира (подшипника). При вычислении момента силы Fчасто удобно разложить ее на две составляющие F' и F", параллельные координатным осям - (или на три); тогда, по теореме Вариньона,
mx( F )=mx( F' )+mx( F" ) и т.д.
| 1 2 3 4 5 6 7 8 9 |
| Окончание табл.С5 |
| 1 2 3 4 5 6 7 8 9 |
| Рис.С5.5 |
| Рис.С5.4 |
| Рис.С5.2 |
| РисС5.3 |
| Рис.С5.0 |
| Рис.С5.1 |
|
КИНЕМАТИКА
Задача К1
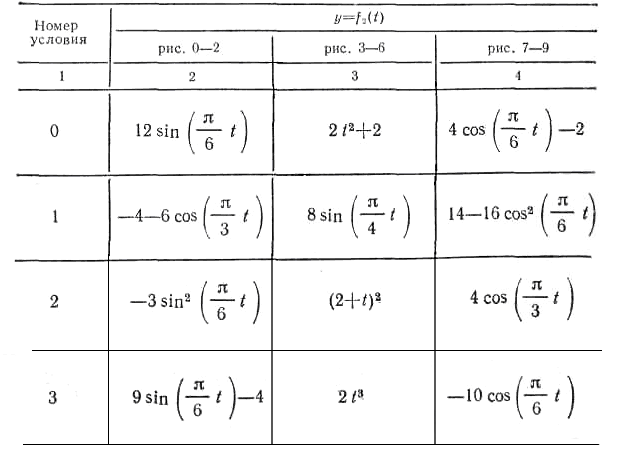
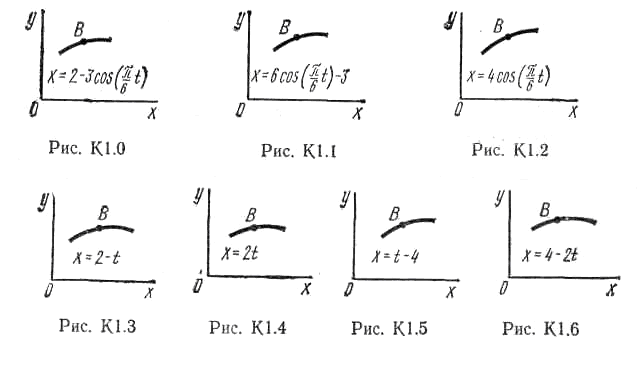
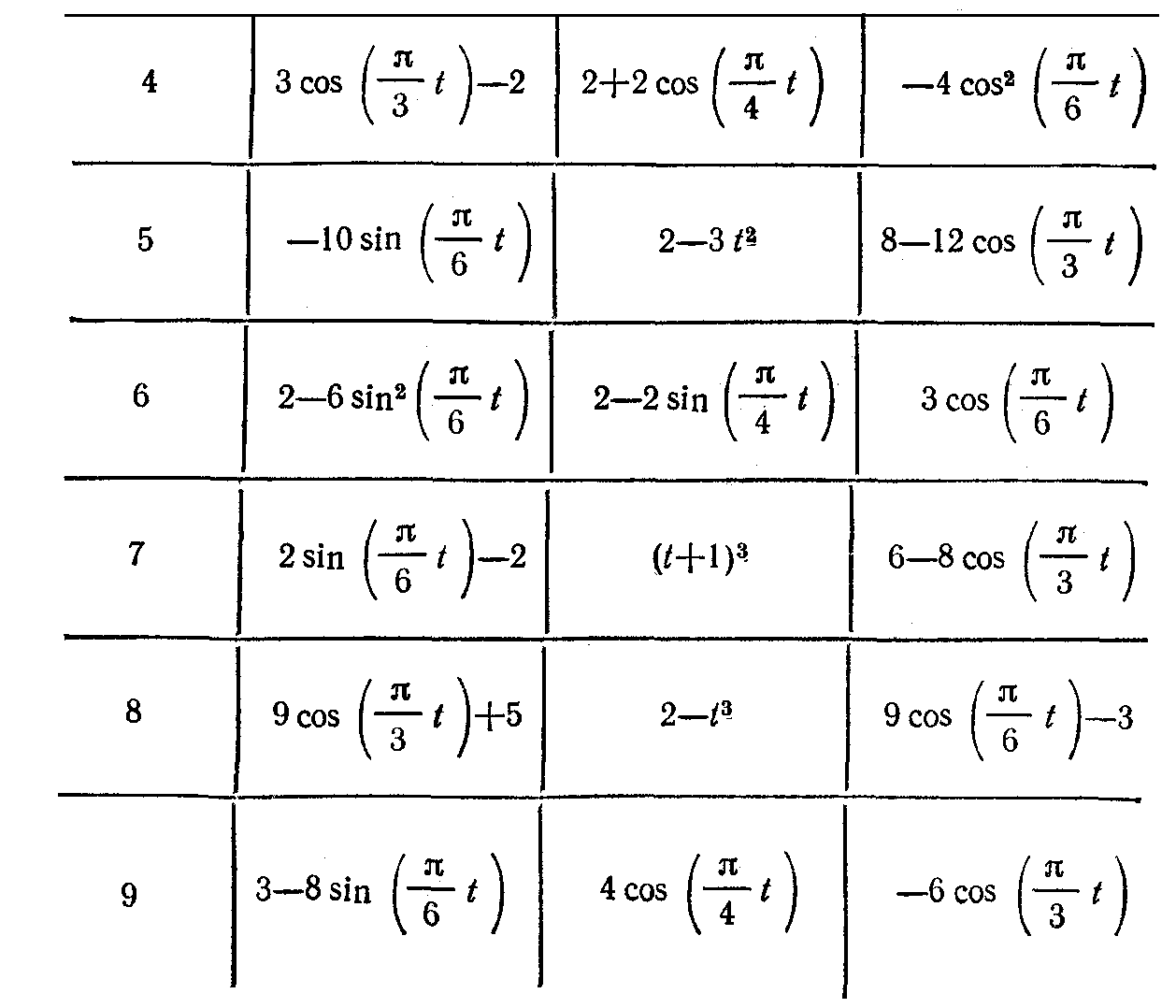
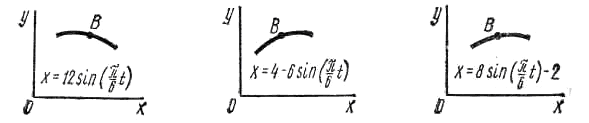
Точка В движется в плоскости ху (рис. К 1.0—К 1.9, табл. К1; траектория точки на рисунках показана условно). Закон движения точки задан уравнениями x=f1(t), y= f2(t), где х и у выражены в сантиметрах, t — в секундах.
Найти уравнение траектории точки; для момента времени t1 = = 1 с определить скорость и ускорение точки, а также ее касательное и нормальное ускорения и радиус кривизны в соответствующей точке траектории.
Зависимость x=f1(t) указана непосредственно на рисунках, а зависимость у=f2(t) дана в табл. К1 (для рис. 0—2 в столбце 2, для рис. 3—6 в столбце 3, для рис. 7—9 в столбце 4). Как и в задачах С1— С5, номер рисунка выбирается по предпоследней цифре шифра, а номер условия в табл. К1 —по последней.
Указания. Задача К1 относится к кинематике точки и решается с помощью формул, по которым определяются скорость и ускорение точки в декартовых координатах (координатный способ задания движения точки), а также формул, по которым определяются касательное и нормальное ускорения точки.
В данной задаче все искомые величины нужно определить только для момента времени t1 = 1 с. В некоторых вариантах задачи при определении траектории или при последующих расчетах (для их упрощения) следует учесть известные из тригонометрии формулы: cos 2α=1—2 sin2 α = 2 cos2 α —1; sin2α =2 sinα cosα.
|
Таблица К1
| Окончание табл.К1 |
|
| 1 2 3 4 |
|
Рис. К1.7 Рис. К1.8 Рис. К1.9
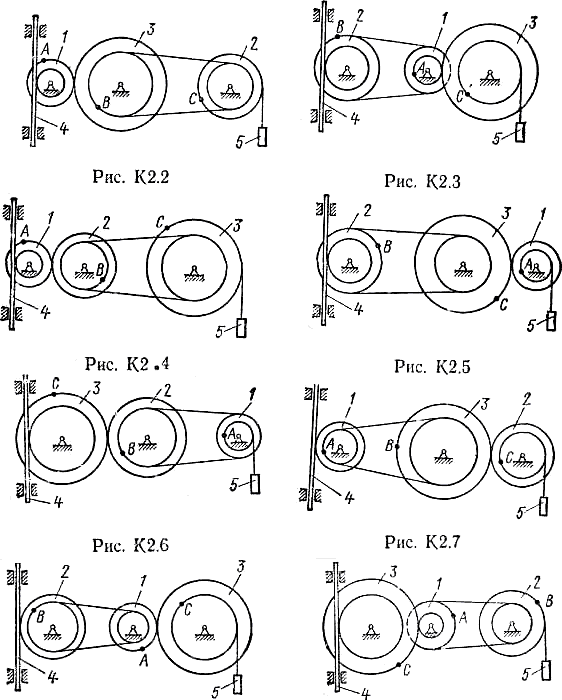
Задача К2
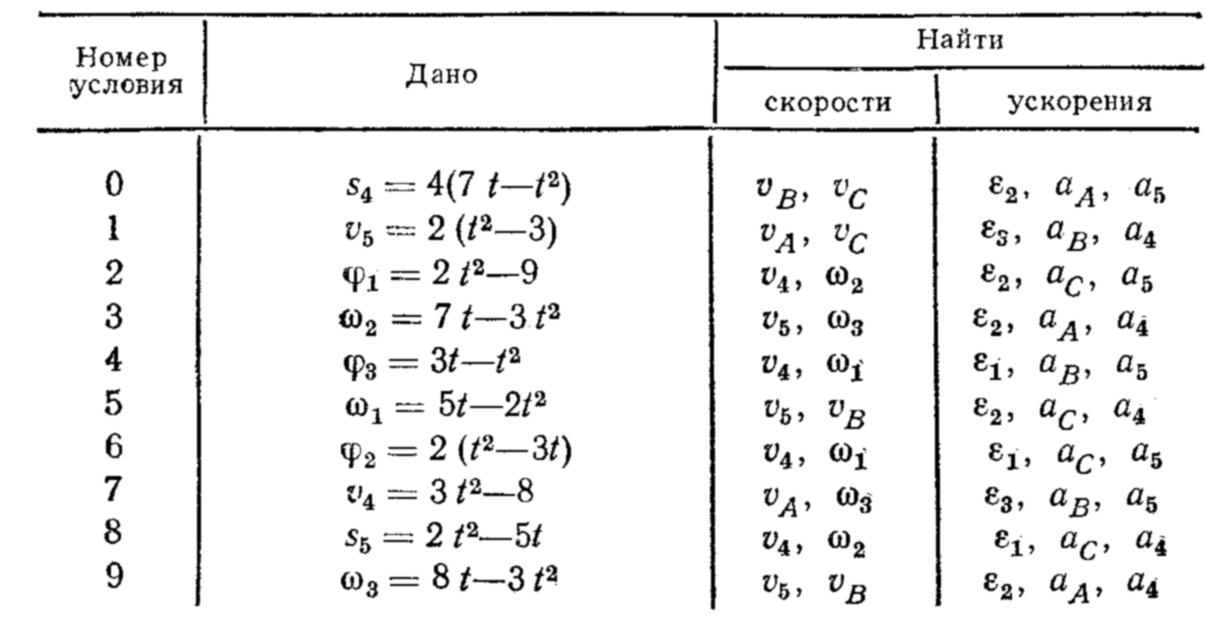
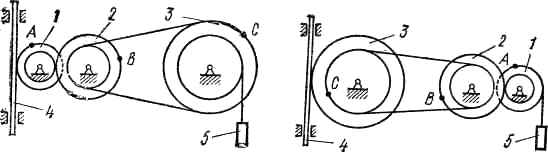
Механизм состоит из ступенчатых колес 1—3, находящихся в зацеплении или связанных ременной передачей, зубчатой рейки 4 и груза 5, привязанного к концу нити, намотанной на одно из колес
(рис. К2.0—К2.9, табл. К2). Радиусы ступеней колес равны соот-ветственно: у колеса 1-r1=2 см, R1=4 см, у колеса 2-r2=6 см, R2=8 см, у колеса 3-r3=12 см, R3=16 см. На ободьях колес расположены точки А, В,С. В столбце «Дано» таблицы указан закон движения или закон изменения скорости ведущего звена механизма, где φ1(t)— закон вращения колеса 1, S4(t)—закон движения рейки 4, ω2(t)—закон изменения угловой скорости колеса 2, V5(t) - закон изменения скорости груза 5и т. д. (везде φ выражено в радианах, s — в сантиметрах, t — в секундах). Положительное направление для φ и ω) против хода часовой стрелки, для S4, S5и V4, V5 — вниз.
Определить в момент времени t1=2 с указанные в таблице в столбцах «Найти» скорости (v— линейные, со ω —угловые) и ускорения (a — линейные, ε — угловые) соответствующих точек или тел (V5 — скорость груза 5 и т. д.).
Указания. Задача К2 — на исследование вращательного движения твердого тела вокруг неподвижной оси. При решении задачи учесть, что когда два колеса находятся в зацеплении, скорость точки зацепления каждого колеса одна и та же, а когда два колеса связаны ременной передачей, то скорости всех точек ремня и, следовательно, точек, лежащих на ободе каждого из этих колес, в данный момент времени численно одинаковы; при этом считается, что ремень по ободу колеса не скользит.
Таблица К2
| Рис.К2.0 Рис.К2.1 |
| Рис.К2.6 Рис.К2.7 |
| Рис.К2.2 Рис.К2.3 |
| Рис.К2.8 Рис.К2.9 |
| Рис.К2.4 Рис.К2.5 |
Задача КЗ
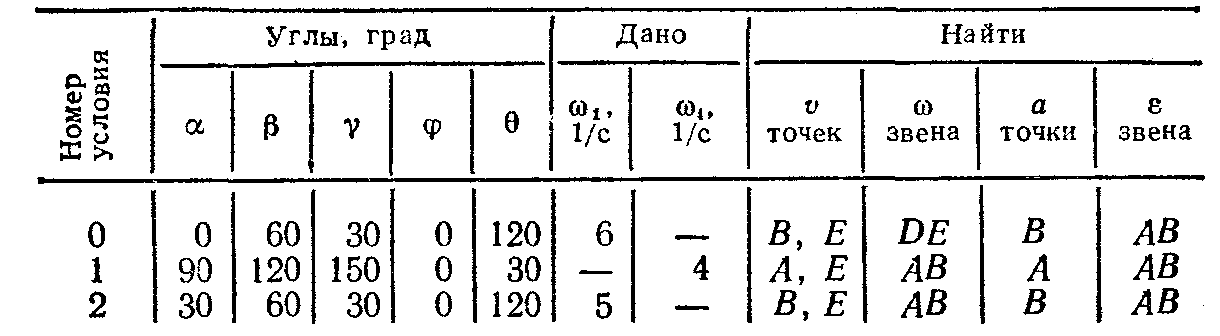
Плоский механизм состоит из стержней /, 2, 3,4 и ползуна В или Е (рис. КЗ.О—КЗ.7) или из стержней 1, 2, 3 и ползунов В и Е (рис. К3.8, К3.9), соединенных друг с другом и с неподвижными опорами О1, О2 шарнирами; точка D находится в середине стержня АВ. Длины стержней равны соответственно: l1= 0,4 м, l2=1.2 м, l3= 1,4 м, l4=0,6 м. Положение механизма определяется углами α, β, γ, φ, Ө. Значения этих углов и других заданных величин указаны в табл. КЗа (для рис. 0—4) или в табл. КЗб (для рис. 5—9); при этом в табл. КЗа ω1 и ω4 — величины постоянные.Определить величины,указанные в таблицах в столбцах«Найти».
Дуговые стрелки на рисунках показывают, как при построении чертежа механизма должны откладываться соответствующие углы: по ходу или против хода часовой стрелки (например, угол γ на рис. 8 следует отложить от DB по ходу часовой стрелки, а на рис. 9 — против хода часовой стрелки и т. д.).
Построение чертежа начинать со стержня, направление которого определяется углом α; ползун с направляющими для большей наглядности изобразить так, как в примере КЗ (см. рис. КЗ, б).
Заданные угловую скорость и угловое ускорение считать направленными против хода часовой стрелки, а заданные скорость Vbи ускорение  в— от точки В к b (на рис. 5—9).
в— от точки В к b (на рис. 5—9).
Указания. Задача КЗ — на исследование плоскопараллельного движения твердого тела. При ее решении для определения скоростей точек механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела и понятием о мгновенном центре скоростей, применяя эту теорему (или это понятие) к каждому звену механизма в отдельности.
При определении ускорений точек механизма исходить из векторного равенства  , где А — точка, ускорение
, где А — точка, ускорение  которой или задано, или непосредственно определяется по условиям задачи (если точка А движется по дуге окружности, то
которой или задано, или непосредственно определяется по условиям задачи (если точка А движется по дуге окружности, то  ); В — точка, ускорение
); В — точка, ускорение  которой нужно определить (если точка В движется по дуге окружности радиуса l, то
которой нужно определить (если точка В движется по дуге окружности радиуса l, то  ,где численно
,где численно  ; входящая сюда скорость
; входящая сюда скорость  определяется так же, как и скорости других точек механизма).
определяется так же, как и скорости других точек механизма).
Таблица КЗа к рис. КЗ.О—К3.4)
| 1 2 3 4 5 6 7 8 9 10 11 12 |
Дата добавления: 2016-06-29; просмотров: 4007;
Поиск по сайту
Узнать еще
- II. Основные задачи ГО
- II. Основные задачи службы торговли и питания
- NP-СЛОЖНЫЕ И ТРУДНОРЕШАЕМЫЕ ЗАДАЧИ
- NP-сложные и труднорешаемые задачи
- X. ситуационные задачи по 3 модулю
- Автоматизация технологического проектирования. Основные задачи и модели автоматизации технологического проектирования
- Автомобильной службы части (соединения) после получения задачи
- Алгоритм и этапы решения задачи

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
