Лабораторная работа №7
ИССЛЕДОВАНИЕ СИСТЕМ ВЕКТОРНОГО УПРАВЛЕНИЯ
БЕЗ ДАТЧИКА ОБРАТНОЙ СВЯЗИ ПО СКОРОСТИ
Цель работы: получить практические навыки настройки преобразователя частоты «Danfoss FC – 302», исследовать работу электропривода с векторным управлением без датчика обратной связи по скорости.
Общие положения
В частотно-регулируемых асинхронных электроприводах векторное управление связано как с изменением частоты и текущих значений переменных (напряжения, тока статора, потокосцепления), так и со взаимной ориентацией их векторов в декартовой системе координат. За счет регулирования и амплитудных значений переменных, и фазовых углов между их векторами достигается наиболее качественное регулирование скорости, момента и тока асинхронного двигателя, как в статике, так и динамике. В тех случаях, когда по требованиям технологического процесса диапазон регулирования скорости асинхронного двигателя не должен превышать  применяются бездатчиковые системы асинхронных электроприводов с векторным управлением. В таких системах информация о текущих значениях и пространственных положениях векторов потокосцепления и значениях скорости вращения асинхронного двигателя определяется косвенно по мгновенным значениям токов и напряжений фаз двигателя на основе математической модели асинхронного двигателя. Бездатчиковые системы векторного управления асинхронным двигателем из-за нестабильности параметров схемы замещения двигателя уступают системам с прямым векторным управлением.
применяются бездатчиковые системы асинхронных электроприводов с векторным управлением. В таких системах информация о текущих значениях и пространственных положениях векторов потокосцепления и значениях скорости вращения асинхронного двигателя определяется косвенно по мгновенным значениям токов и напряжений фаз двигателя на основе математической модели асинхронного двигателя. Бездатчиковые системы векторного управления асинхронным двигателем из-за нестабильности параметров схемы замещения двигателя уступают системам с прямым векторным управлением.
Электромагнитный момент асинхронного двигателя можно определить через произведение вектора  , комплексно сопряженного с вектором потокосцепления обмотки ротора
, комплексно сопряженного с вектором потокосцепления обмотки ротора  , и вектора тока статора
, и вектора тока статора  [1].
[1].
Уравнения электромагнитного момента асинхронного двигателя в виде скалярных произведений векторов , в их компактной и развернутой формах:
 (1.1)
(1.1)
Если сориентировать систему координат по действительной составляющей потокосцепления ротора  , то мнимая составляющая вектора потокосцепления ротора
, то мнимая составляющая вектора потокосцепления ротора  будет равна нулю. В этом случае момент асинхронного двигателя пропорционален произведению действительной составляющей потокосцепления ротора и мнимой составляющей тока статора
будет равна нулю. В этом случае момент асинхронного двигателя пропорционален произведению действительной составляющей потокосцепления ротора и мнимой составляющей тока статора  :
:
 . (1.2)
. (1.2)
На основе выражения (1.2) строятся системы векторного управления асинхронным электроприводом с ориентацией по вектору потокосцепления ротора.
Функциональная схема асинхронного электропривода с бездатчиковым векторным управлением с ориентацией по вектору потокосцепления ротора приведена на рис 1.1.
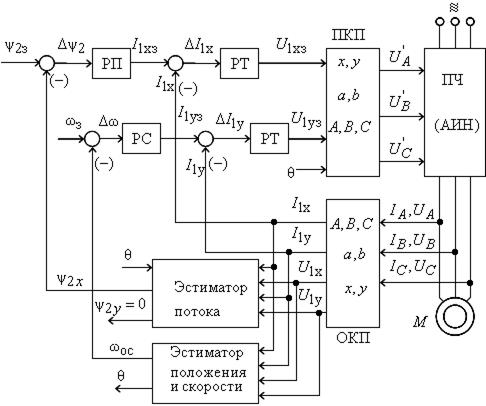
Рис. 1.1. Функциональная схема асинхронного электропривода с бездатчиковым векторным управлением с ориентацией по вектору потокосцепления ротора
На рис. 1.1 приняты следующие обозначения физических величин:
 – сигнал задания потокосцепления ротора;
– сигнал задания потокосцепления ротора;
 – сигнал задания скорости вращения электропривода;
– сигнал задания скорости вращения электропривода;
– сигнал, пропорциональный действительной составляющей потокосцепления ротора;
– сигнал, пропорциональный мнимой составляющей потокосцепления ротора;
 – сигнал задания действительной составляющей тока обмотки статора;
– сигнал задания действительной составляющей тока обмотки статора;
 – сигнал задания мнимой составляющей тока обмотки статора;
– сигнал задания мнимой составляющей тока обмотки статора;
 – сигнал, пропорциональный действительной составляющей тока статора асинхронного двигателя во вращающейся системе координат;
– сигнал, пропорциональный действительной составляющей тока статора асинхронного двигателя во вращающейся системе координат;
– сигнал, пропорциональный мнимой составляющей тока статора асинхронного двигателя во вращающейся системе координат;
 – сигнал задания действительной составляющей напряжения обмоток статора асинхронного двигателя во вращающейся системе координат;
– сигнал задания действительной составляющей напряжения обмоток статора асинхронного двигателя во вращающейся системе координат;
 – сигнал задания мнимой составляющей напряжения обмоток статора асинхронного двигателя во вращающейся системе координат;
– сигнал задания мнимой составляющей напряжения обмоток статора асинхронного двигателя во вращающейся системе координат;
 – составляющая вектора напряжения обмотки статора, ориентированная вдоль оси
– составляющая вектора напряжения обмотки статора, ориентированная вдоль оси  вращающейся системы координат;
вращающейся системы координат;
 – составляющая вектора напряжения обмотки статора, ориентированная вдоль оси
– составляющая вектора напряжения обмотки статора, ориентированная вдоль оси  вращающейся системы координат;
вращающейся системы координат;
 ,
,  ,
,  – токи фаз обмоток статора асинхронного двигателя;
– токи фаз обмоток статора асинхронного двигателя;
 ,
,  ,
,  – напряжения фаз обмоток статора асинхронного двигателя;
– напряжения фаз обмоток статора асинхронного двигателя;
Схема содержит прямой (ПКП) и обратный (ОКП) координатные преобразователи. Преобразователи координат необходимы для того, что построение системы управления электроприводом переменного тока возможно только во вращающейся системе координат, а токи и напряжения обмоток асинхронного двигателя – гармонические сигналы неподвижной трехфазной системы координат.
Регуляторами системы управления в соответствии с задающими сигналами скорости и потокосцепления и сигналами обратной связи формируются сигналы управления во вращающейся системе координат. В прямом координатном преобразователе управляющие сигналы переводятся в сигналы 

 неподвижной системы координат, которые управляют инвертором.
неподвижной системы координат, которые управляют инвертором.
Система уравнений, в соответствии с которыми осуществляется преобразование сигналов прямым координатным преобразователем, приведена в лабораторной работе №2.
Обратный координатный преобразователь сначала пересчитывает мгновенные значения напряжений трехфазной системы координат A, B, C в неподвижную систему координат  :
:
 (1.4)
(1.4)
Затем напряжения переводятся во вращающуюся систему координат  :
:
 , (1.5)
, (1.5)
 . (1.6)
. (1.6)
По этим же формулам выполняется обратное преобразование для расчета токов , .
Мгновенное значение пространственных углов поворота векторов потокосцепления, тока и напряжения вычисляются на основании скорости вращения поля статора:
 . (1.7)
. (1.7)
В современных электроприводах переменного тока потокосцепление ротора  вычисляется через уравнения динамической модели асинхронного двигателя с помощью эстиматора потока. Уравнение для расчета потокосцепления ротора может быть получено из решения системы уравнений, описывающих работу асинхронного двигателя в динамике во вращающейся системе координат [2]:
вычисляется через уравнения динамической модели асинхронного двигателя с помощью эстиматора потока. Уравнение для расчета потокосцепления ротора может быть получено из решения системы уравнений, описывающих работу асинхронного двигателя в динамике во вращающейся системе координат [2]:
 (1.8)
(1.8)
где  – скорость вращения ротора.
– скорость вращения ротора.
 – составляющая вектора потокосцепления обмотки статора, ориентированная вдоль оси вращающейся системы координат;
– составляющая вектора потокосцепления обмотки статора, ориентированная вдоль оси вращающейся системы координат;
 – составляющая вектора потокосцепления обмотки статора, ориентированная вдоль оси вращающейся системы координат;
– составляющая вектора потокосцепления обмотки статора, ориентированная вдоль оси вращающейся системы координат;
 – коэффициент рассеяния.
– коэффициент рассеяния.
Эстиматор потока решает совместно систему уравнений (1.8) относительно составляющих вектора потокосцепления ротора во вращающейся системе координат при
 , (1.9)
, (1.9)
где  – частота напряжения обмоток статора двигателя.
– частота напряжения обмоток статора двигателя.
В бездатчиковых асинхронного электропривода с векторным управлением информация о скорости вращения электродвигателя рассчитывается эстиматором положения и скорости. В бездатчиковых электроприводах измерение скорости производится через легко измеряемые напряжения на выходе инвертора, к которому подключен асинхронный двигатель и токи фаз статора двигателя.
В основу принципа построения систем бездатчикового векторного управления положено математическое описание асинхронного двигателя в неподвижной системе координат  ,
,  [2]:
[2]:
 (1.10)
(1.10)
Наличие скорости в системе уравнений (1.10) позволяет определить ее значение через значения других переменных [5].
Если предположить, что составляющие потокосцепления ротора  и
и  в неподвижной системе координат известны, то можно определить его модуль и угол поворота
в неподвижной системе координат известны, то можно определить его модуль и угол поворота
 , (1.11)
, (1.11)
 . (1.12)
. (1.12)
Зная угол поворота  , можно легко вычислить синхронную скорость вращения двигателя, взяв производную от (1.12)
, можно легко вычислить синхронную скорость вращения двигателя, взяв производную от (1.12)
 . (1.13)
. (1.13)
Производная от  может быть найдена в виде [4]
может быть найдена в виде [4]
 . (1.14)
. (1.14)
Если  , тогда
, тогда
 (1.15)
(1.15)
Угол поворота  вычисляется на основании скорости вращения поля статора в соответствии с (1.7).
вычисляется на основании скорости вращения поля статора в соответствии с (1.7).
Дата добавления: 2016-06-22; просмотров: 1899;
Поиск по сайту
Узнать еще
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3.1 РАБОТА. МОЩНОСТЬ
- I.4.3 РАБОТА. МОЩНОСТЬ. ЭНЕРГИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
- II.Работа с Internet Explorer (проводник)
- III. 3 РАБОТА И ЭНЕРГИЯ. ЗАКОНЫ СОХРАНЕНИЯ
- MS Word. Выделение текста. Понятие фрагмента текста. Способы форматирования фрагментов, работа с фрагментами (копирование, удаление, перемещение).
- Window - работа с окнами.
- А) Совместная работа элементов турбокомпрессора высокого давления.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
