Системы позиционирования и навигации
Особенности определения местоположения потребителя в СРНС
Рассматриваются существующие и перспективные системы позиционирования и навигации, создаваемые на базе научных и технологических исследований последних лет (спутниковые и наземные системы позиционирования). Наглядное представление об основных технологиях позиционирования в настоящее время и степени их распространения и точности дано на рис. 1
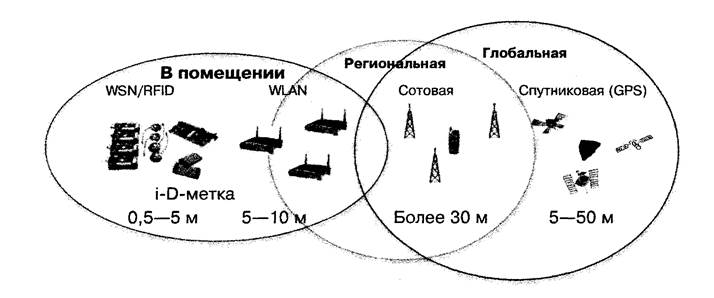
Рис. 1. Основные технологии позиционирования
их качественный уровень охвата и точности
Системы спутникового позиционирования основаны на положении искусственных спутников, которые вращаются по известным орбитам и непрерывно передают сигналы, используемые мобильными терминалами (навигационными приемниками - НАП) для выполнения измерения дальностей. По своей сути это навигационные системы, в то время как последние наземные системы предназначены в основном для местного позиционирования в своем регионе.
Система глобального позиционирования (GPS) в настоящее время в большей степени является глобальной навигационной спутниковой системой (GNSS).
Наземные системы позиционирования используют сеть наземных станций. В прошлом использовались несколько наземных систем для морской и авиационной навигации: Decca, LORAN-C, TACAN и VOR/DME и множество других [2, 25]. Они характеризуются очень специализированными областями применения и высокой стоимостью установки и обслуживания. В долгосрочной перспективе некоторые из них будут заменены GNSS.
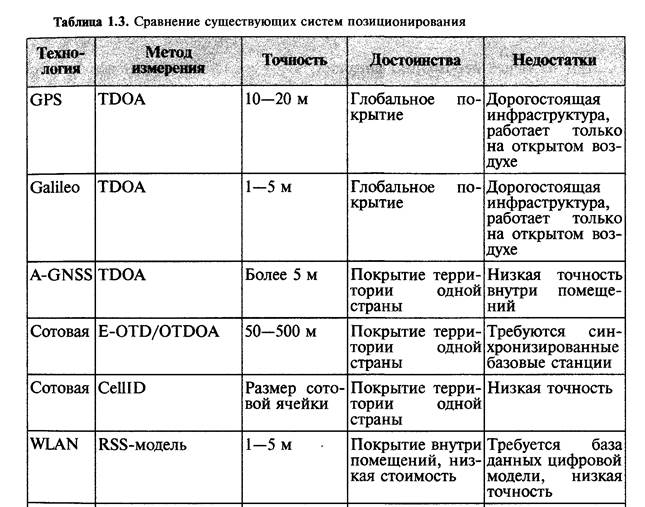 В табл. 1.3 сведены основные характеристики нескольких существующих систем. Список систем позиционирования с использованием других технологий можно найти в работе [16].
В табл. 1.3 сведены основные характеристики нескольких существующих систем. Список систем позиционирования с использованием других технологий можно найти в работе [16].
Передним краем беспроводного позиционирования является гибридизация спутниковых и наземных систем на базе концепции бесшовного позиционирования, основной пример — вспомогательная услуга GPS, которая использует наземные сотовые сети для повышения точности GPS-приемника.
1.2.1. Спутниковые системы
Мир навигации только что стал свидетелем важного этапа развития:
появились и достигли полной работоспособности различные спутниковые навигационные системы, конкурирующие и дополняющие GPS.
Европа призывает к развертыванию своей глобальной спутниковой системы Galileo,
Россия радикально модернизировала глобальную навигационную спутниковую систему (ГЛОНАСС),
Япония и Индия разрабатывают собственные региональные системы,
Китай занят своей совершенствованием изначально региональной системы Beidou в глобальную.
Соединенные Штаты вкладывают значительные ресурсы в модернизацию GPS. Появление этого нового спутникового созвездия способствовало ускорению мировых исследований в области спутниковой навигации, глубоко изменило рынок навигационных приемников и благодаря новым возможностям, новым услугам и повышению доступности расширило перспективы потребителей.
 Тем не менее бесспорным лидером среди спутниковых систем сегодня является GPS. GPS является спутниковой радионавигационной системой, используемой для вычисления точного времени и трехмерной позиции в любом месте на Земле. Схема этой процедуры приведена на рис. 1.5.
Тем не менее бесспорным лидером среди спутниковых систем сегодня является GPS. GPS является спутниковой радионавигационной системой, используемой для вычисления точного времени и трехмерной позиции в любом месте на Земле. Схема этой процедуры приведена на рис. 1.5.
Определение местоположения с помощью GPS достигается путем получения сигнала с помощью ТОА-измерения, или дальности (псевдодальности), от минимум 3 (в лучшем случае четырех) спутников GPS.
Эти предварительные значения псевдодальности представляют собой измеренные расстояния при прямой видимости (line of sight — LOS) сигналов, передаваемых каждым из спутников Nsat- Псевдодальность rк для каждого спутника к будет равна
 |
 где хк, ук, zк — геоцентрические, геофиксированные (ECEF) координаты для к спутника,
где хк, ук, zк — геоцентрические, геофиксированные (ECEF) координаты для к спутника,
с — скорость света.
Индекс и относится к потребителю. Временной сдвиг пользователя является сдвигом между временем опорного приемника и (неизвестным) GPS-временем. Как описано далее, система (по крайней мере) четырех таких уравнений линеаризуется и методом итераций решается для определения местоположения потребителя и его временного сдвига с использованием метода наименьших квадратов (LS) [24].
Временной сдвиг пользователя представляет собой изменяющуюся во времени величину, которая влияет на все псевдодальности и обусловлена следующими факторами:
• дрейф и сдвиг шкалы времени в приемнике потребителя;
•задержка при прохождении сигнала через спутниковую аппаратуру (аналоговый и цифровой);
• задержка сигнала при прохождении/обработке в антенне и приемнике.
В принципе, высокоточное позиционирование может быть получено в результате решения системы уравнений, упомянутых ранее. Однако в целом есть несколько основных источников ошибки GPS.
Два из них включают неизвестные атмосферные ошибки или задержки в ионосфере и тропосфере. Из-за этих эффектов LOS-сигнал прибывает позже, чем предсказывают уравнения псевдодальности.
Многолучевое распространение — еще один основной источник ошибки псевдодальности. Многолучевые сигналы (как правило, нежелательные) — это отраженные сигналы от земли или других близлежащих препятствий. В отличие от атмосферных воздействий, которые непосредственно влияют на LOS-сигнал ТОА, многолучевость является причиной ошибочных измерений ТОА-сигнала приемником GPS.
Принципы, обобщенные ранее для GPS, являются основой для понимания архитектуры всех спутниковых навигационных систем, в настоящее время находящихся в разработке, как глобальных, так и региональных. Более подробное обсуждение представлено в главе 2.
| <== предыдущая лекция | | | следующая лекция ==> |
| Анализ набора стратегических зон хозяйствования | | | Процесс стратегического менеджмента |
Дата добавления: 2019-12-09; просмотров: 422;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
