Классификация технических средств автоматизации
Ответ:
Современные средства автоматизации делятся на две группы: коммутированные и некоммутированные (программированные) технические средства автоматизации:
1) Коммутированные средства автоматизации
• Регуляторы
• Релейные схемы
2) Программированные средства автоматизации
• ADSP процессоры
• ПЛК
• ПКК
• ПАК
• Специализированные контроллеры
• ADSP процессоры – средство автоматизации, которое используются для сложного математического анализа процессов в системе. Эти процессоры имеют быстродействующие модули ввода/вывода, которые с высокой частотой могут передавать данные на центральный процессор, который с помощью сложного математического аппарата анализирует работу системы. Пример – системы вибродиагностики, которые используют для анализа ряды Фурье, спектральный анализ и счетчик импульсов.
• ПЛК – самые распространенные средства автоматизации. Имеют собственный блок питания, центральный процессор, оперативную память, сетевую карту, модули ввода/вывода. Преимущество – высокая надежность работы системы, адаптация к промышленным условиям.
• ПКК – компьютер с платами ввода/вывода, сетевыми картами, которые служат для ввода/вывода информации.
• ПАК (программированные автоматизированные контроллеры) – ПЛК+ПКК. Имеют распределенную сетевую структуру для обработки данных (несколько ПЛК и ПКК).
• Специализированные контроллеры – не являются свободно программируемыми средствами автоматизации, а используют стандартные программы, в которых можно изменить только некоторые коэффициенты (параметры ПИД-регулятора, время хода исполнительного механизма, задержки и т.д.). Такие контроллеры ориентированы на заранее известную систему регулирования (вентиляция, отопление, ГВС).
Особенностью ADSP и ПКК является использование стандартных языков программирования: C, C++, Assembler, Pascal , — так как они созданы на базе ПК. Эта особенность средств автоматизации является одновременно и достоинством и недостатком. Преимущество в том, что с помощью стандартных языков программирования можно написать более сложный и гибкий алгоритм. Недостаток – для работы с ними необходимо создавать драйверы и использовать язык программирования, который является более сложным.
Преимуществом ПЛК и ПАК является использование инженерных языков программирования, которые стандартизованы IEC 61131-3 . Эти языки рассчитаны не на программиста, а на инженера-электрика.
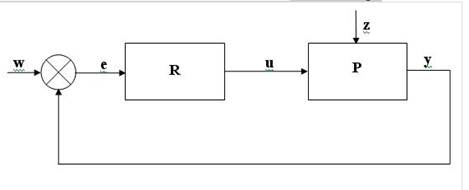
1. Структурная схема системы автоматического регулирования.
Ответ:
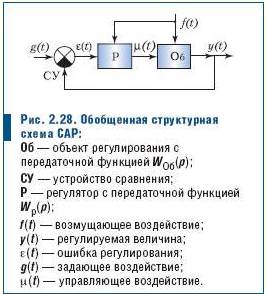
Задача САР: сохранение постоянными значения управляемой величины; системы программного управления, где управляемая величина изменяется по заданной программе; следящие системы, для которых программа управления заранее неизвестна.
2. Классификация унифицированных электрических сигналов.
Ответ:
Сигнал-физический процесс. Отображающий сообщение.
Унифицированный сигнал-вид носителя информации м диапазон измерения не зависят от измеряемой величины, получают из естественного сигнала с помощью нормирующих преобразователей.
В АСУ наиболее распространены электрические сигналы связи, достоинствами которых являются высокая скорость передачи сигнала, низкая стоимость и доступность источников энергии, простота прокладки линий связи. Пневматические сигналы применяют в основном в нефтяной, химической и нефтехимической промышленности, где необходимо обеспечить взрывобезопасность и не требуется высокое быстродействие. Гидравлическиесигналы в основном применяют в гидравлических следящих системах и устройствах управления гидравлическими исполнительными механизмами.
Из электрических сигналов наиболее распространены унифицированные сигналы постоянного тока и напряжения.Частотные сигналы используют в телемеханической аппаратуре и комплексе технических средств локальных информационно-управляющих систем.
Естественный сигнал-сигнал первичного преобразования, вид и диапазон измерения которого определяется его физическими свойствами.
3. Унифицированные сигналы напряжения.
Ответ:
В промышленности применяется огромное разнообразие первичных датчиков физических величин, каждый из которых имеет свой выходной сигнал. Чтобы избежать такого же разнообразия вторичных измерительных и регулирующих приборов, датчики оснащаются нормирующими преобразователями. Задача нормирующих преобразователей состоит в том, чтобы преобразовать различные сигналы первичных преобразователей (термопар, термопреобразователей сопротивления, влажности, давления, веса, рН и проч.) в унифицированные сигналы постоянного тока или напряжения.
Унифицированные сигналы постоянного тока и напряжения. Они используются как для передачи информации от датчиков к устройствам управления и от них к исполнительным устройствам, так и для обмена информацией устройств управления.
Применение таких сигналов зависит от :
-требуемых характеристик ИИС
-вида канала, связи
-формы представления измерительной информации
-использование целой элементной базы.
- пост. напряжение 0-10мВ, 0-20мВ, -10-0-+10мВ, 0-10В, 0-1В, -1-0-+1В
- переменное напряжение 0-2В, -1-0-+1В
4. Унифицированные сигналы тока.
Ответ:
Используются сигналы следующих значений постоянного тока:
- пост. ток 0-5мА, 0-20мА, -5-0-+5мА, 4-20мА (наиб. исп. можно обнаружить разрыв)
Унифицированный сигнал – это сигнал у кот. вид постоянной деформации и диапазон измерения не зависит от вида измеряемой величины, метода измерения, диапазона изменения измеряемой величины.
Среди стандартных сигналов наиболее удобным и популярным является токовый сигнал 4-20 мА. Причины этого в следующем.
При работе с токовым сигналом 4-20 мА легко обнаружить обрыв линии связи – ток будет равен нулю (т.е. выходить за пределы диапазона).
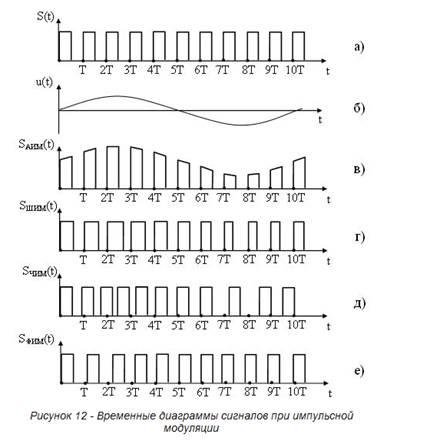
5. Импульсно-модулированные сигналы.
Ответ:
Импульсная модуляция — это модуляция, при которой в качестве несущего сигнала используется периодическая последовательность импульсов, а в качестве модулирующего может использоваться аналоговый или дискретный сигнал.
Поскольку периодическая последовательность характеризуется четырьмя информационными параметрами (амплитудой, частотой, фазой и длительностью импульса), то различают четыре основных вида импульсной модуляции:
амплитудно-импульсная модуляция (АИМ); происходит изменение амплитуды импульсов несущего сигнала;
частотно-импульсная модуляция (ЧИМ), происходит изменение частоты следования импульсов несущего сигнала;
фазо-импульсная модуляция (ФИМ), происходит изменение фазы импульсов несущего сигнала;
широтно-импульсная модуляция (ШИМ), происходит изменение длительности импульсов несущего сигнала.
6. Дискретные двоичные сигналы.
Ответ:
Дискретный сигнал — сигнал, имеющий конечное, обычно небольшое, число значений.
Практически всегда дискретный сигнал имеет два либо три значения. Нередко его называют также цифровым сигналом.
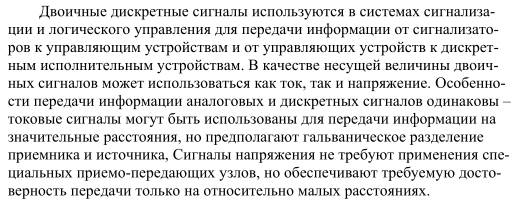
В цифровых системах используются двоичные сигналы (рис.1.3, а), имеющие значения:
(+) или (-).
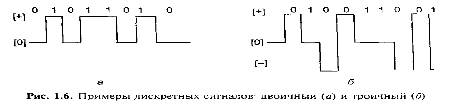
Здесь «единица» представляется отсутствием потенциала в канале, тогда как «нуль» характеризуется положительным либо отрицательным импульсом. При этом полярность импульсов, представляющих «нули», должна чередоваться, т. е. за положительным (+) импульсом должен следовать отрицательный (-) и наоборот. В форме троичного сигнала осуществляется не только кодирование передаваемых данных, но также обеспечивается синхронизация работы канала и проверка целостности данных.
^ Дискретные сигналы, по сравнению с аналоговыми, имеют ряд важных преимуществ: помехоустойчивость, легкость восстановления формы, простота аппаратуры передачи.
7. Унифицированные цифровые сигналы.
Ответ:
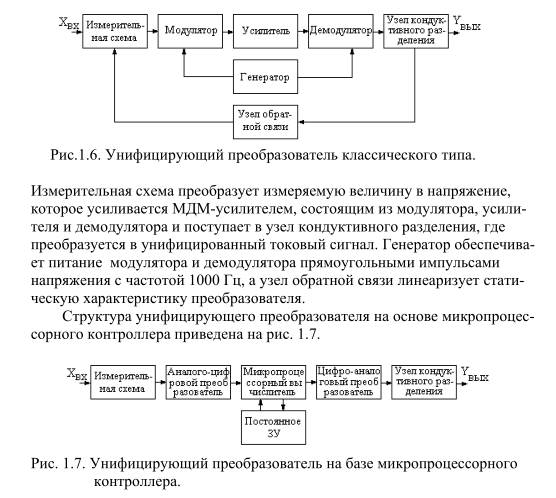
8. Унифицирующие преобразователи.
Ответ:
9. Типовые узлы аналоговых преобразований электрических сигналов. Инвертирующий усилитель.
Ответ:
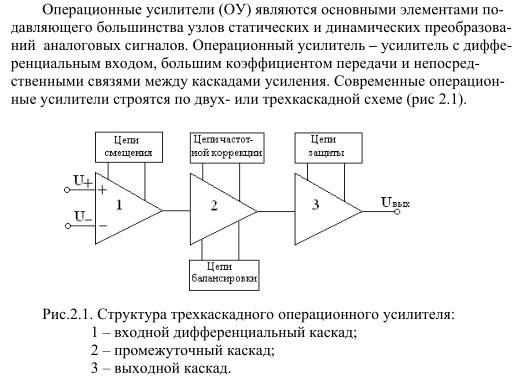
1) Каскад № 1. Входной каскад преобразует дифференциальное напряжение в несимметричный сигнал напряжения.
Цепи смещение – высоко стабильные питающие цепи, исп. для стабилизации коэффициента передачи, при внешнем и внутренним воздействием.
2) Каскад № 2. Усилитель напряжения.
Цепи частотной коррекции – исп. для выравнивания амплитудно и фазо частотных характеристик.
Цепи балансировки – исп. для компенсации ассиметрии входного сигнала, и для регулирования фазной составляющей напряжения.
3) Каскад № 3. Выполняет функцию усилителя мощности для обеспечения достаточных нагрузочных способностей.
При больших нагрузках – большие токи.
Цепи защиты – исп для блокировки выходного ОУ, при перегрузках и КЗ.
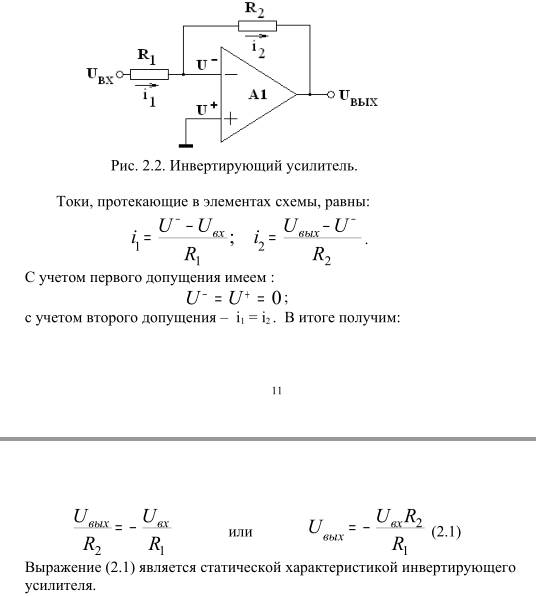
Инвертирующий усилитель.
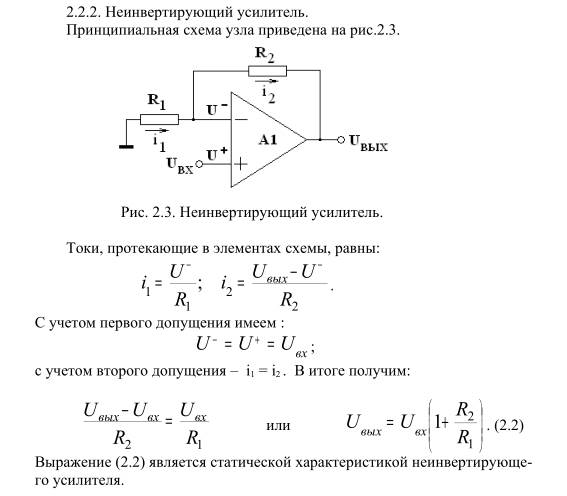
10. Неинвертирующий усилитель.
Ответ:
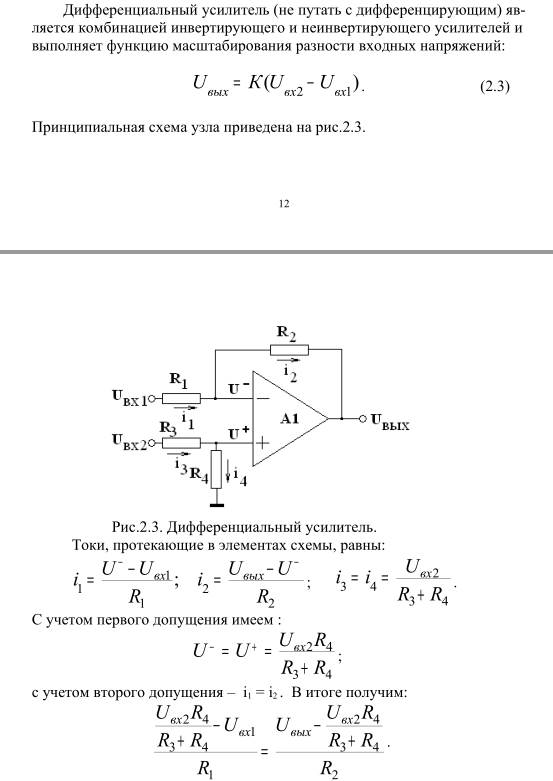
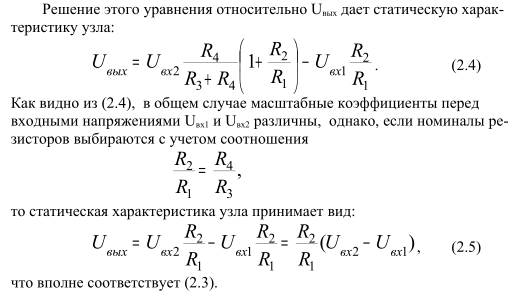
11. Дифференциальный усилитель.
Ответ:
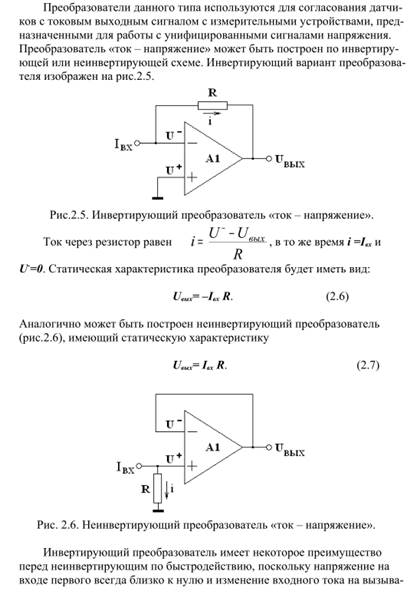
12. Преобразователи «ток-напряжение».
Ответ:

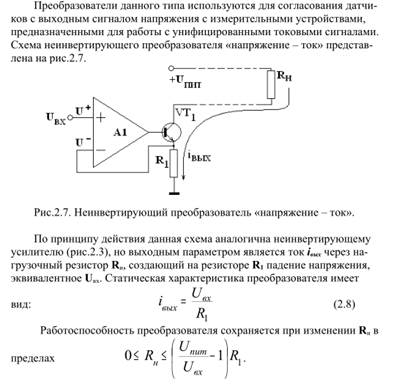
13. Преобразователи «напряжение-ток».
Ответ:
14. Логарифмический усилитель.
Ответ:

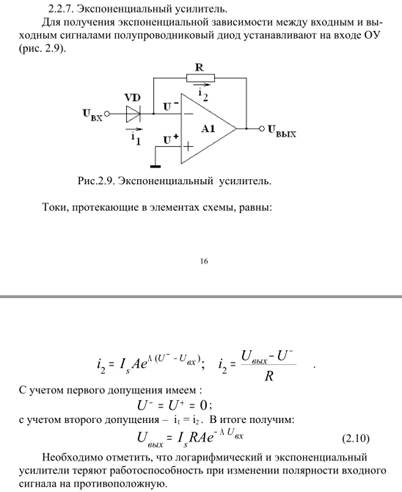
15. Экспоненциальный усилитель.
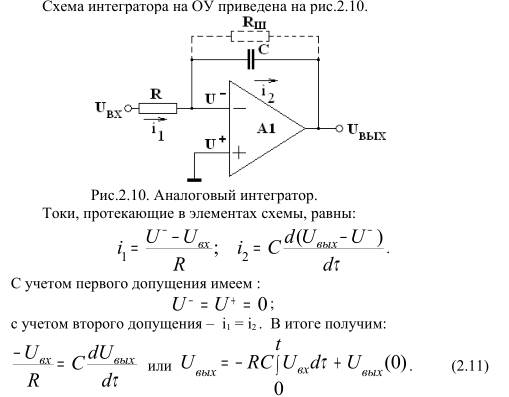
16. Аналоговый интегратор.
17. Узел дифференцирования.
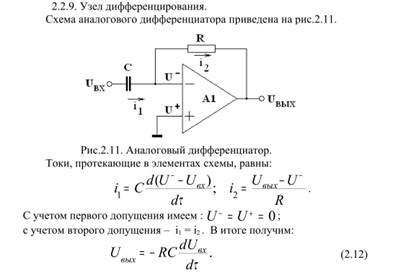
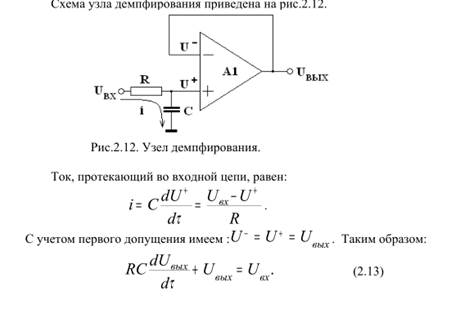
18. Узел демпфирования.
19. Регулирующие устройства и автоматические регуляторы. Общие сведения. Классификация.
Автоматический регулятор – это средство автоматизации, получающее, усиливающее, преобразующее сигнал отклонения регулируемой величины и целенаправленно воздействующее на объект регулирования; он обеспечивает поддержание заданного значения регулируемой величины или изменение его значения по заданному закону.
Автоматические регуляторы классифицируют в зависимости от назначения, принципа действия конструктивных особенностей, вида используемой энергии и др.
По виду регулируемого параметра автоматические регуляторы подразделяются на регуляторы температуры, давления, разрежения, распада, уровня, состава и содержания вещества и т.п.
По конструктивным признакам автоматические регуляторы подразделяются на аппаратные, приборные.
Регуляторы аппаратного типа конструктивно представляют собой техническое устройство, работающее в комплекте с первичным измерительным преобразователем.
Регуляторы приборного типа работают только в комплексе с вторичным измерительным прибором. Приборные регуляторы не имеют непосредственной связи с первичным измерительным преобразователем.
Электрические автоматические регуляторы применяются главным образом для регулирования на невзрывоопасных объектах при больших расстояниях от пункта управления до объекта регулирования.
Пневматические автоматические регуляторы применяются во взрыво– и пожароопасных зонах при небольших расстояниях (до 400 метров) от пункта управления до объекта регулирования.
Устройство, выполняющее функции поддержания какого-либо параметра (температура, давление и т.д.) в заданных пределах (или изменения его по заданной программе), называется регулирующим устройством.

Условные обозначения:
ОР - объект регулирования;
РО - регулирующий орган;
АЭП - аналоговый электроизмерительный прибор;
МИ - исполнительный механизм;
СУ - сравнивающее устройство;
У - усилительное устройство.
В сравнивающем устройстве (СУ) происходит сравнение регулируемого значения x с его заданным значением y. Если под воздействием внешних возмущений (P) x не равно y, то на выходе СУ появляется сигнал z = x – y.
Усилительное устройство (У) предназначено для усиления мощности сигнала рассогласовывания z до уровня, необходимого для управления исполнительным механизмом (МИ).
МИ с помощью регулирующего органа (РО) воздействует на объект регулирования ОР, при этом регулируемая величина x изменяется в сторону уменьшения z.
АЭП производит измерение и запись регулируемого параметра.
По принципу действия регуляторы подразделяются на две группы:
1) прерывного действия;
2) непрерывного действия (статического и астатического).
20. Позиционный регулятор.
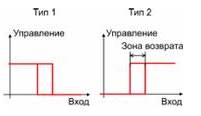
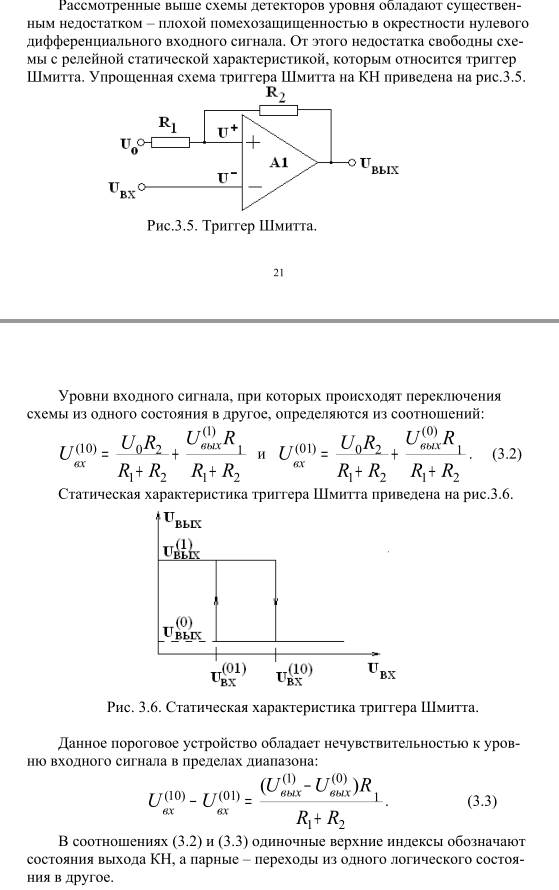
Это самый широко распространенный тип регулятора. Причина популярности в его простоте при удовлетворительном качестве регулирования. Этот регулятор описывается зависимостью выходного сигнала управления от входного сигнала, представленной на диаграмме.
Регулятор типа 1 применяется для управления объектами с исполнительным устройством типа «нагреватель»: наличие сигнала управления приводит к увеличению измеренного сигнала, регулятор типа 2 - для управления объектами с исполнительным устройством типа «холодильник»: наличие сигнала управления приводит к уменьшению измеренного сигнала. Принцип действия регулятора типа 1 (типа 2 аналогично) заключается в том, что он полностью включает управляющее воздействие, если измеренный сигнал меньше заданного (уставки), и полностью выключает, если сигнал больше уставки.
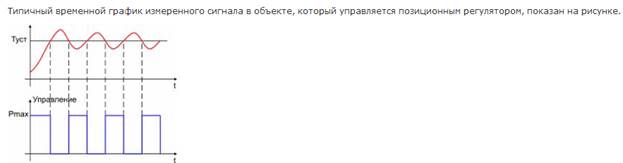
Принципиально важны два обстоятельства. Во-первых, при управлении объектом с помощью позиционного регулятора всегда присутствуют колебания измеренного сигнала по причине инерционности отдельных элементов, входящих в контур управления. Во-вторых, величина этих колебаний и период не зависят от регулятора, а полностью определяются конструкцией и параметрами объекта управления, измерительного датчика и исполнительного устройства.
Применение позиционного регулятора дает хорошие результаты, если:
- инерционность датчика и исполнительного устройства значительно меньше инерционности объекта правления;
- транспортное запаздывание отсутствует;
- мощность управляющего воздействия соответствует объекту управления.
21. Пропорциональный (П) регулятор.
П-регулятор – это устройство в обратной связи, которое формирует управляющий сигнал. П-регулятор выдает выходной сигнал, пропорциональный входному, с коэффициентом пропорциональности К.
Выходной сигнал, вырабатываемый пропорциональной частью П-регулятора , противодействует отклонению регулируемой величины от данного значения, которое наблюдается в данный момент. Выход П-регулятор выдаст тем больше, чем больше отклонение.
Если П-регулятор имеет входной сигнал, который равняется заданному значению, то выходной равен 0.
П-регулятор имеет существенный недостаток в том, что при его использовании значение регулируемой величины никогда не стабилизируется на заданном значении. Все из-за так называемой статической ошибки. Она равна отклонению регулируемой величины, которая дает такой выходной сигнал, который стабилизирует выходную величину именно на данном значении. Это важно учитывать при выборе закона регулирования.
22. Интегральный (И) регулятор.
В интегральном регуляторе изменение входного сигнала Dj вызывает пропорциональное изменение скорости выходного сигнала (а не его величины, как в пропорциональном регуляторе).
Математически закон регулирования записывается:
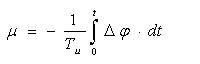
Tи - постоянная времени интегрирования, является параметром настройки интегрального регулятора.
В интегральном регуляторе скорость изменения выходного сигнала тем больше, чем больше величина входного сигнала. Численное значение параметра равно времени, в течение которого исполнительный механизм переместится из одного крайнего положения в другое при максимальном значении Dj. Интегральный регулятор поддерживает установившееся значение регулируемой величины вне зависимости от нагрузки регулируемого объекта, т.е. в системе отсутствует остаточное отклонение. По этой причине такие регуляторы называют астатическими. Недостаток - малое быстродействие.
23. Дифференциальный (Д) регулятор.
Дифференциальная составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения, которые прогнозируются в будущем. Отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему.
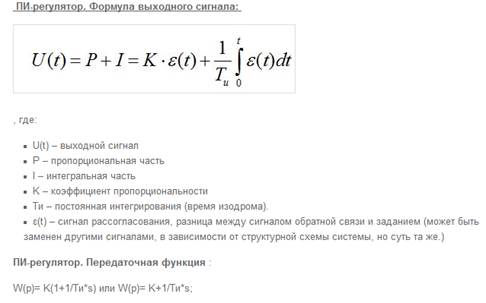
24. Пропорционально- интегральный (ПИ) регулятор.
ПИ-регулятор является одним из наиболее универсальных регуляторов. Фактически ПИ-регулятор – это П-регулятор с дополнительной интегральной составляющей. И-составляющая, дополняющая алгоритм, в первую очередь нужна для устранения статической ошибки, которая характерна для пропорционального регулятора. По сути, интегральная часть является накопительной, и таким образом позволяет осуществить то, что ПИ-регулятор учитывает в данный момент времени предыдущую историю изменения входной величины
25. Пропорционально- дифференциальный (ПД) регулятор.
Пропорционально-дифференциальные регуляторы более сложны по структуре, чем пропорциональные и интегральные. Наличие двух параметров настройки усложняет методику выбора регулятора. Применение прпорционально-дифференциалъных регуляторов дает возможность увеличивать общее усиление при сохранении устойчивости системы, что резко улучшает качество протекания переходных процессов. Кроме того, пропорционально-дифференциальные регуляторы пригодны для стабилизации регулируемых систем с двумя нейтральными звеньями или с одним нейтральным и одним неустойчивым звеном. Повышение общего коэффициента усиления цепи регулирования приводит к уменьшению статических ошибок.
Сочетание пропорционального воздействия с дополнительным воздействием по производной использовано в пропорционально-дифференциальных регуляторах, или сокращенно ПД-регуляторах. [5]
Если при предельно возможных значениях параметров данного-регулятора систему стабилизировать нельзя, то пропорционально-дифференциальный регулятор неприменим для регулирования данного объекта с запаздыванием.
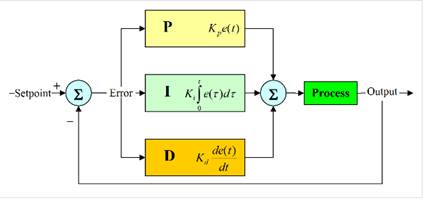
26. Пропорционально- интегрально-дифференциальный (ПИД) регулятор.
Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
ПИД-регулятор – самый сбалансированный из всех регуляторов, построенных на основе типовых звеньев, поэтому широко применяется в различных сферах.
По сути, даное устройство это эволюция ПИ-регулятора.
Пропорциональная составляющая вырабатывает сигнал, который противодействует отклонению регулируемой величины в данный момент времени (идеология чисто П-регулятора).
Интегральная составляющая накапливает результирующее значение, нивелируя, таким образом, недостаток П-регулятора – наличие статической ошибки.
ПИД-регулятор обладает Д-составляющей, которая как бы прогнозирует отклонение от задания и следит за скоростью отклонения, поэтому является самой быстрой в данном алгоритме. По сути, это является преимуществом и недостатком одновременно
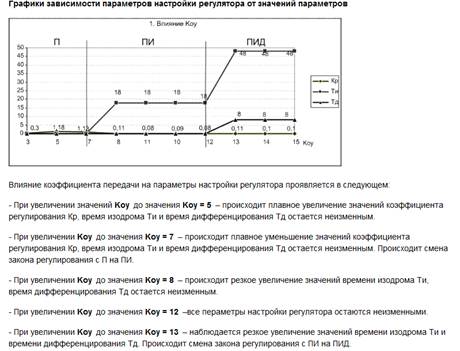
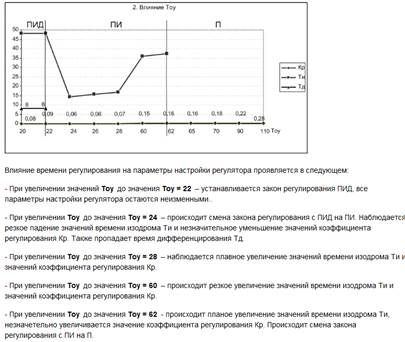
27. Влияние параметров настройки регулятора на показатели качества регулирования.
Выбор критерия качества регулирования зависит от цели, для которой используется регулятор. Такой целью может быть:
поддержание постоянного значения параметра (например, температуры);
слежение за изменением уставки или программное управление;
управление демпфером в резервуаре с жидкостью и т.д.
Для той или иной задачи наиболее важными могут быть следующие факторы:
форма отклика на внешнее возмущение (время установления, перерегулирование, коэффициент затухания и др.);
форма отклика на шумы измерений;
форма отклика на сигнал уставки;
робастность по отношению к разбросу параметров объекта управления;
требования к экономии энергии в управляемой системе;
минимум шумов измерений и др.
28. Корректирующие элементы.
Для улучшения показателей качества работы систем автоматики выполняют коррекцию, которая заключается в изменении параметров (коэффициента усиления, постоянных времени и др.) или структуры системы. Основными показателями качества являются точность и устойчивость. Простейшие способы повышения точности заключаются в увеличении коэффициента усиления (изменение параметра) или введении интегрирующего звена (изменение структуры). Корректирующий элемент включают в прямую цепь (последовательная коррекция) или вводят дополнительные обратные связи (параллельная коррекц 717j91eh ия).
Наиболее часто применяются последовательно включаемые корректирующие элементы, выполняющие операции интегрирования и дифференцирования. Достаточно просто эти операции приближенно выполняются с помощью так называемых RC-цепочек. На рис. 7.1 показаны интегрирующее (а) и дифференцирующее (б) корректирующие звенья.
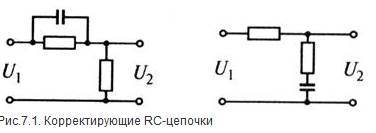
К промежуточным элементам относятся также так называемые корректирующие элементы, вводимые в автоматическую систему для улучшения ее динамических качеств. В роли корректирующих элементов используются, например, простейшие дифференцирующие, интегрирующие или просто инерционные элементы
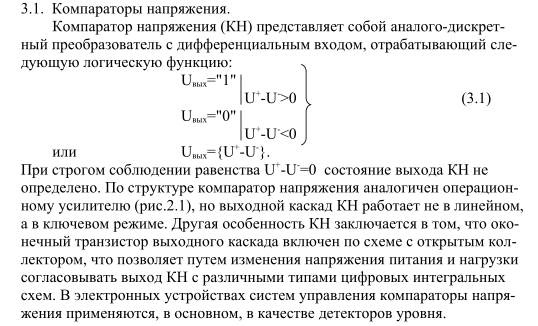
29. Типовые узлы аналого-дискретных и аналого-цифровых преобразований электрических сигналов. Компараторы напряжения.
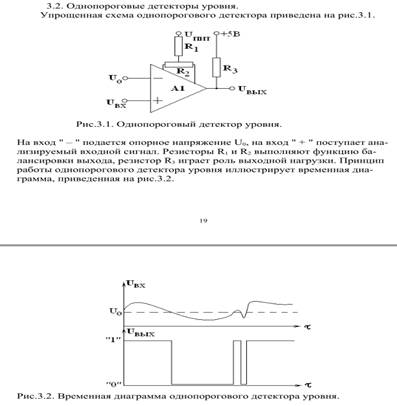
30. Однопороговые детекторы уровня
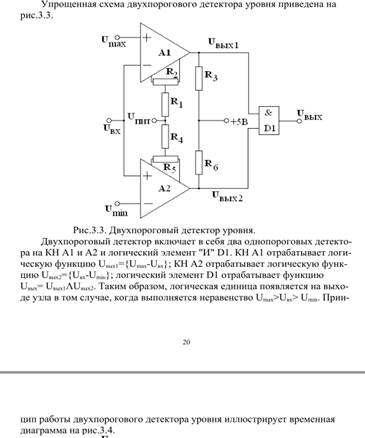
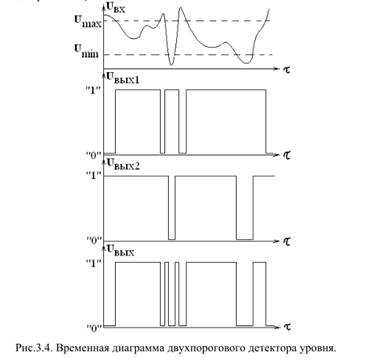
31. Двупороговые детекторы уровня.
32. Триггер Шмитта.
33. Цифровое представление информации.
34. Цифровое Аналоговое Преобразование.
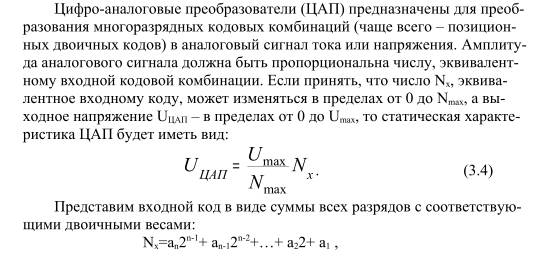
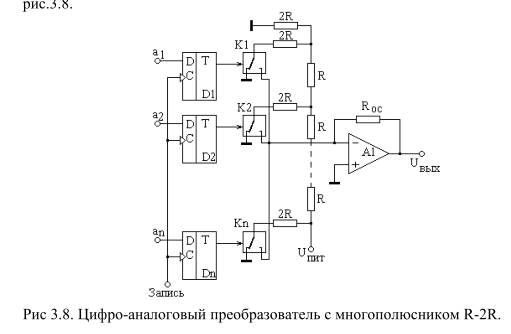
Преобразование можно выделить на 3 операции:
1) Дискретизация (из непрерывного во времени сигнала выбирается некоторое его значение, определяющее через T интервал времени).
2) Квантование – округление значений выбранного аналогичного напряжения в соответствии с сеткой уровнем квантования (сдвинуты относительно друг друга, учитывается шаг квантования).
3) Кодирование – каждому переменному значению напряжения ставится в соответствии номер уровня квантования, представляющий последовательность двоичных чисел.
35. Аналоговое Цифровое Преобразование.
Принципиальная схема АЦП представлена у вас в тетрадях.
Принцип действия.
Шаг и уровень квантования определяется величиной опорной стабилизации напряжения: E0/
Компаратор на ОУ сравнивает 2 сигнала: опорный (ур. квантования) и информационный сигнал (x(t)).
Если на выходе будет большое положительное напряжение, то оно преобразуется в логическую единицу, с помощью стабилитрона или резистора.
Если входной сигнал меньше опорного, отрицательное напряжение с выхода ОУ, открывает стабилитрон и тем самфм преобразуется в логический нуль.
Шифратор CD – преобразуется под поступающий с компаратора в двоичный код на шине данных. Изменение шифрованного кода происходит только, при появлении первого синхронного импульса, частота синхронизации, задает частоту дискретизации аналоговому сигналу.
36. Коммутаторы информационных сигналов.

37. Исполнительные механизмы и сопутствующие им устройства. Общие требования.
Есть в тетрадке – последняя тема, за 24.04.2013.
38. Частотное управление.
способ управления электроприводом, при к-ром обмотка статора электродвигателя перем. тока (синхронного или асинхронного) питается от преобразователя частоты с изменяемой выходной частотой. Электроприводы с частотным управлением, использующие тиристорные преобразователи и микропроцессорные устройства автоматич. регулирования, по своим статич. и динамич. хар-кам не уступают электроприводам типа тиристорный преобразователь - двигатель. Отсутствие коллекторных электрич. машин, ограничений по мощности и скорости, более высокий коэфф. мощности обеспечивают Ч. у. э. широкую область применения. Мощность от неск. кВт до неск. десятков МВт.
39. Система "Преобразователь частоты с управляемым выпрямителем.
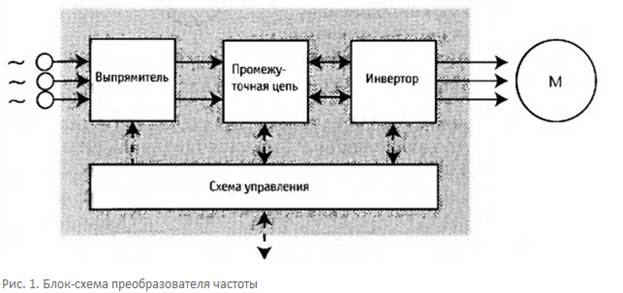
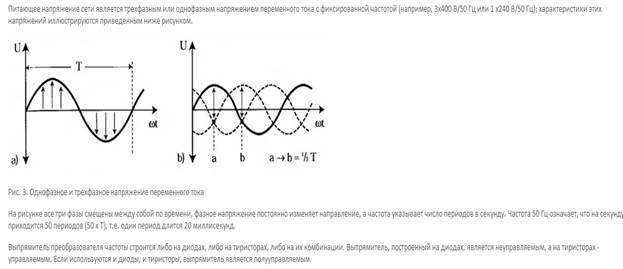
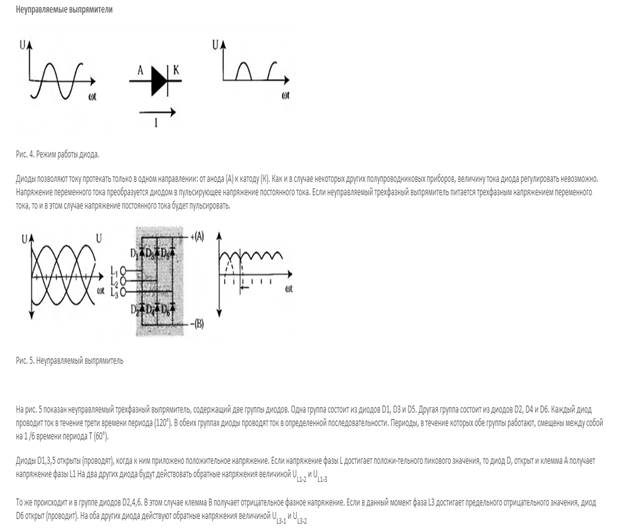
1.Выпрямитель формирует пульсирующее напряжение постоянного тока при его подключении к одно/трехфазной питающей электросети переменного тока. Выпрямители бывают двух основных типов - управляемые и неуправляемые.
2.Промежуточная цепь одного из трех типов:
a) преобразующая напряжение выпрямителя в постоянный ток.
b) стабилизирующая или сглаживающая пульсирующее напряжение постоянного тока и подающая его на инвертор.
c) преобразующая неизменное напряжение постоянного тока выпрямителя в изменяющееся напряжение переменного тока.
3.Инвертор, который формирует частоту напряжения электродвигателя. Некоторые инверторы могут также конвертировать неизменное напряжение постоянного тока в изменяющееся напряжение переменного тока.
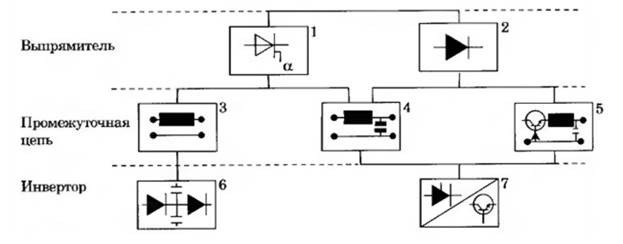
4. Электронная схема управления, которая посылает сигналы в выпрямитель, промежуточную цепь и инвертор и получает сигналы от данных элементов. Построение управляемых элементов зависит от конструкции конкретного преобразователя частоты (см. рис. 2.02).
1- управляемый выпрямитель,
2- неуправляемый выпрямитель,
3- промежуточная цепь изменяющегося постоянного тока,
4- промежуточная цепь неизменного напряжения постоянного тока
5- промежуточная цепь изменяющегося постоянного тока,
6- инвертор с амплитудно-импульсной модуляцией (АИМ)
7- инвертор с широтно-импульсной модуляцией (ШИМ)
Для полноты следует упомянуть прямые преобразователи, которые не имеют промежуточной цепи. Такие преобразователи используются в мегаваттном диапазоне мощности для формирования низкочастотного питающего напряжения непосредственно из сети частотой 50 Гц, при этом их максимальная выходная частота составляет около 30 Гц.
40. Система "Преобразователь частоты с неуправляемым выпрямителем".
41. Выпрямители на базе тиристорных преобразователей
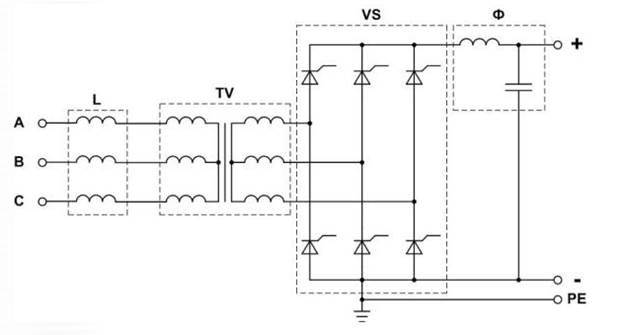
Трехфазный тиристорный управляемый выпрямитель напряжения( тока) ТВН предназначен для преобразования трехфазного переменного напряжения сети в постоянное. Выходное напряжение может быть регулируемым или стабилизированным.
Управляемый выпрямитель может применяться для зарядки аккумуляторных батарей, управления двигателем постоянного тока, питания цепей возбуждении синхронных генераторов и т.д.
Учитывая, что выпрямитель ТВН по своей сути - блок( источник) питания постоянного тока, становится возможным применить его как шкаф оперативного тока( ШОТ) для питания приборов и автоматики подстанций.
42. Электромашинные усилители.
Усилителем называют такое устройство, в котором посредством сигнала малой мощности (входная величина) управляют сравнительно большой мощностью (выходная величина). При этом выходная величина является функцией входного сигнала и усиление происходит за счет энергии внешнего источника.
В электромашинных усилителях выходная (управляемая) электрическая мощность создается за счет механической мощности приводного двигателя.
Электромашинные усилители (ЭМУ) представляют собой коллекторную машину постоянного тока.
В зависимости от способа возбуждения электромашинные усилители подразделяются на усилители продольного поля и усилители поперечного поля.
К усилителям продольного поля, в которых основной поток возбуждения направлен по продольной оси машины, относятся:
1) независимый электромашинный усилитель,
2) Электромашинный усилитель с самовозбуждением,
3) двухмашинные усилители,
4) двухколлекторный электромашинный усилитель,
5)двух- и трехступенчатые электромашинные усилители продольного поля
К усилителям поперечного поля, в которых основной поток возбуждения направлен по поперечной оси машины, относятся:
1 ) Электромашинные усилители с диаметральным шагом обмотки якоря,
2) Электромашинные усилители с полудиаметральным шагом обмотки якоря,
3) Электромашинные усилители с разделенной магнитной системой.
Чем меньше мощность управления электромашинного усилителя, тем меньше вес и габариты аппаратуры управления. Поэтому основной характеристикой является коэффициент усиления.
Эти усилители обладают рядом достоинств, главными из которых являются:
1) большой коэффициент усиления по мощности,.
2) малая входная мощность,
3) достаточное быстродействие, т. е. малые постоянные времени цепей усилителя. Время нарастания напряжения от нуля до номинального значения для промышленных усилителей мощностью 1-5 кВт составляет 0,05—0,1 сек,
4) достаточные надежность, долговечность и широкие пределы изменения мощности,
5) возможность изменения характеристик за счет изменения степени компенсации, позволяющая получать необходимые внешние характеристики.
К числу недостатков электромашинных усилителей следует отнести:
1) относительно большие габариты и вес по сравнению с генераторами постоянного тока той же мощности, так как для получения больших коэффициентов усиления применяется ненасыщенная магнитная цепь,
2) наличие остаточного напряжения за счет гистерезиса. ЭДС, наводимая в якоре потоком остаточного магнетизма, искажает линейную зависимость выходного напряжения от входного сигнала в зоне малых сигналов
43. Магнитные усилители. Общие сведения.
Магнитный усилитель — это статический аппарат, предназначенный для управления величиной переменного тока посредством слабого постоянного тока. Применяется в схемах автоматического регулирования электродвигателей переменного тока
Разновидности:
дроссельный магнитный усилитель;
магнитный усилитель с самонасыщением ( МУС ).
1) Работа магнитного усилителя основана на нелинейности характеристики намагничивания магнитопровода. На крайних стержнях магнитного усилителя находится рабочая обмотка, которая состоит из двух катушек, соединённых последовательно и встречно. Встречное включение рабочих обмоток необходимо для того, чтобы суммарная ЭДС в обмотке управления,наводимая от рабочей обмотки была равна нулю. На среднем стержне размещается обмотка управления из большого количества витков W=. Если ток в неё не подаётся, а к рабочей обмотке, соединённой последовательно с нагрузкой, подведено переменное напряжение U~, то из-за малого количества витков W~ магнитопровод не насыщается, и почти всё напряжение падает на реактивном сопротивлении рабочих обмоток Z~. На нагрузке в этом случае выделяется малая мощность.
2) Включением в цепь обмотки полупроводниковых вентилей - диодов приводит к насыщению сердечника, поскольку по обмоткам будет протекать ток одного направления, а в моменты спадания намагничивающего тока в сердечнике будет присутствовать остаточная намагниченность. Управляющая обмотка создаёт поле, которое размагничивает сердечник.
Основное назначение — управление силовым электроприводом (распространены в строительной технике), также применялись в бытовых стабилизаторах переменного тока, бесконтактных реле, для модуляции сигналов,для удвоения частоты, в регуляторах освещения киноконцертных залов, в двоичной ЭВМ ЛЭМ-1 Л. И. Гутенмахера и в троичных ЭВМ «Сетунь»
Магнитный усилитель позволяет бесконтактно измерять постоянные токи в линиях электропередач. В последнее время для этого всё чаще применяют более компактные датчики Холла.
44. Дроссель с подмагничиванием. Основные характеристики МУ.
Работа магнитного усилителя основана на нелинейности характеристики намагничивания магнитопровод<
| <== предыдущая лекция | | | следующая лекция ==> |
| Конструкция талевой системы. Оснастка. Противозатаскиватель. | | | Способ непосредственного подсчета вероятностей событий. |
Дата добавления: 2021-11-16; просмотров: 158;
Поиск по сайту
Узнать еще
- API как средство интеграции приложений.
- II Классификация САSЕ-средств
- II. Затраты (времени, физических сил, финансовых средств и т.д.)
- II. Классификация документов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- III. Классификация методов воспитания.
- III. Механизмы, средства и методы психологического воздействия.
- III.1.3. ПРИЧИНЫ НАРУШЕНИЙ СЛУХА. ПСИХОЛОГО-ПЕДАГОГИЧЕСКАЯ КЛАССИФИКАЦИЯ НАРУШЕНИЙ СЛУХОВОЙ ФУНКЦИИ У ДЕТЕЙ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
