Метод размещения полюсов
СИНТЕЗ РЕГУЛЯТОРОВ
Классическая схема
Чаще всего регулятор включается перед объектом, как показано на схеме
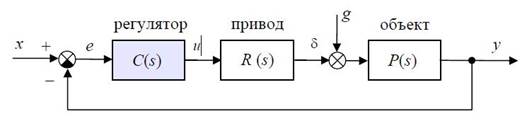
Рисунок 7.1 – Структурная схема
Задача системы управления состоит в том, чтобы подавить действие внешнего возмущения g и обеспечить быстрые и качественные переходные процессы. К сожалению, эти задачи часто противоречивы. Фактически нужно скорректировать систему так, чтобы она имела нужные передаточные функции по возмущению (Wg(s), от входа g к выходу y) и по задающему воздействию (W(s), от входа x к выходу y)
 ,
,  .
.
Для этого можно использовать только один регулятор C(s), поэтому такую систему называют системой с одной степенью свободы.
Легко проверить, что эти две передаточные функции связаны равенством
 .
.
Поэтому, изменяя одну из передаточных функций, мы автоматически меняем и вторую. Таким образом, их невозможно сформировать независимо и решение всегда будет некоторым компромиссом.
Обеспечение нулевой ошибки в такой системе, то есть, абсолютно точное отслеживание входного сигнала, возможно при следующих условиях. Передаточная функция по ошибке (от входа x(t) к ошибке e(t)) равна
 .
.
Для того чтобы ошибка всегда была нулевой, требуется, чтобы эта передаточная функция была равна нулю. Поскольку ее числитель – не нуль, сразу получается, что знаменатель должен обращаться в бесконечность. Можно влиять только на регулятор C(s) (остальные элементы заданы заранее), поэтому получаем C(s) → ∞. Таким образом, для уменьшения ошибки нужно увеличивать коэффициент усиления регулятора. Это так называемый принцип глубокой обратной связи.
Однако нельзя увеличивать усиление до бесконечности. Во-первых, все реальные устройства имеют предельно допустимые значения входных и выходных сигналов. Во-вторых, при большом усилении контура ухудшается качество переходных процессов, усиливается влияние возмущений и шумов, система может потерять устойчивость. Поэтому в схеме с одной степенью свободы обеспечить нулевую ошибку слежения невозможно.
С точки зрения частотных характеристик задача должна иметь следующие условия. С одной стороны, для качественного отслеживания задающего сигнала x(t) желательно, чтобы частотная характеристика W(jω) была примерно равна 1 (в этом случае y(t) ≈ x(t)). С другой стороны, с точки зрения робастной устойчивости нужно обеспечить W(jω) ≈ 0 на высоких частотах, где ошибка моделирования велика. Кроме того, передаточная функция по возмущению должна быть такой, чтобы эти возмущения подавлять, в идеале необходимо обеспечить Wg(jω) ≈ 0.
Выбирая компромиссное решение, обычно поступают следующим образом
1) на низких частотах добиваются выполнения условия W(jω) ≈ 1, что обеспечивает хорошее слежение за низкочастотными сигналами; при этом Wg(jω) ≈ 0, то есть, низкочастотные возмущения подавляются;
2) на высоких частотах стремятся сделать W(jω) ≈ 0, чтобы обеспечить робастную устойчивость и подавление шума измерений; при этом Wg(jω) ≈ P(jω), то есть система фактически работает как разомкнутая, регулятор не реагирует на высокочастотные помехи.
ПИД-регуляторы
Несмотря на развитые современные методы проектирования сложных регуляторов, подавляющее большинство промышленных систем управления основаны на регуляторах первого и второго порядка. Эти регуляторы во многих случаях могут обеспечить приемлемое управление, легко настраиваются и дешевы при массовом изготовлении.
Простейший регулятор – пропорциональный или П-регулятор– это простой усилитель с передаточной функцией C(s) = K . Его выход – это ошибка управления e(t), умноженная на коэффициент K. С помощью П-регулятора можно управлять любым устойчивым объектом, однако он дает относительно медленные переходные процессы и ненулевую статическую ошибку.
Чтобы убрать статическую ошибку в установившемся режиме, в регулятор вводят интегральный канал с коэффициентом усиления KD , так что
 ,
,  .
.
Такой регулятор называется пропорционально-интегральным или ПИ-регулятором. Интегратор выдает сигнал, пропорциональный накопленной ошибке, поэтому переходный процесс несколько замедляется. Однако за счет интегрального канала обеспечивается нулевая ошибка в установившемся состоянии при ступенчатом возмущении и ступенчатом изменении задающего сигнала-уставки.
Для ускорения переходных процессов добавляют дифференциальный канал с коэффициентом усиления KD
 ,
,  .
.
Такой регулятор называется ПИД-регулятором(пропорционально-интегрально-дифференциальный). Регуляторы этого типа очень хорошо зарекомендовали себя в практических задачах. Кроме того, иногда используются ПД-регуляторы(пропорционально-дифференциальные), у которых нет интегрального канала.
Управление по производной – это быстрый способ управления. Сигнал дифференциального канала наиболее важен при изменениях входов и исчезает в установившемся режиме. Он позволяет реагировать не на само увеличение ошибки, а на тенденцию ее изменения, и принять «превентивные меры». Главный недостаток дифференциального канала – большое влияние высокочастотных помех, например, шумов измерений. Для того чтобы сделать регулятор физически реализуемым, вместо чистого дифференцирования используют инерционное дифференцирующее звено
 ,
,
где TD – малая постоянная времени. Чем меньше TD, тем в большем частотном диапазоне выполняется точное дифференцирование, но сильнее влияют высокочастотные помехи.
Для устойчивого объекта можно выбрать коэффициенты регулятора опытным путем, выполняя эксперименты с реальным объектом. Предложено несколько методов решения этой задачи, например, правила Зиглера-Никольса или Коэна-Куна.
Можно показать, что любой регулятор второго порядка с интегратором может быть представлен в форме ПИД-регулятора
 .
.
Метод размещения полюсов
Один из простых методов синтеза регулятора – размещение полюсов передаточной функции замкнутой системы, которые во многом определяют ее динамику, например, быстродействие и степень затухания колебаний. Смысл в том, чтобы разместить эти полюса в заданных точках комплексной плоскости с помощью специально выбранного регулятора. Эта задача сводится к решению системы линейных уравнений.
Пусть передаточная функция объекта задана в виде отношения полиномов
 .
.
Выбирается регулятор вида
 ,
,
где a0, a1, b0 и b1 – неизвестные коэффициенты, которые нужно определить. Характеристический полином замкнутой системы равен

 .
.
Предположим, что необходимо выбрать регулятор так, чтобы разместить корни полинома Δ(s) в заданных точках, то есть добиться выполнения равенства
 ,
,
где δi (i = 0, ..., 2) – заданные числа. Приравнивая коэффициенты при одинаковых степенях s в последних двух равенствах, получается
или в матричном виде
 .
.
Решение уравнения имеет вид
 .
.
Квадратная матрица в этом выражении (она называется матрицей Сильвестра) должна быть обратима. Можно доказать, что она действительно обратима тогда и только тогда, когда полиномы n(s) и d(s) не имеют общих корней, то есть передаточная функция объекта P(s) несократима. В противном случае общий корень этих полиномов неизбежно будет корнем характеристического полинома Δ(s).
Кроме того, для того, чтобы количество неизвестных коэффициентов было равно числу уравнений, порядок регулятора нужно выбирать не меньше, чем N −1, где N – порядок модели объекта управления
 ,
,
где deg обозначает степень полинома. Иначе полученное уравнение будет разрешимо только при специально выбранном полиноме Δ(s).
При размещении полюсов никак не учитываются нули передаточной функции, которые также влияют на динамику системы.
Коррекция ЛАФЧХ
На протяжении многих лет самым популярным инженерным методом синтеза регуляторов был метод, основанный на использовании логарифмических частотных характеристик (ЛАФЧХ). Он основан на двух свойствах ЛАФЧХ
1) логарифмические амплитудные и фазовые частотные характеристики для последовательного соединения двух блоков (например, регулятора и объекта управления) равны сумме ЛАЧХ и ЛФЧХ этих блоков;
2) если передаточная функция объекта не имеет неустойчивых нулей и полюсов (с положительной вещественной частью), то амплитудная частотная характеристика однозначно определяет фазовую; отсюда следует что можно свести выбор регулятора к изменению только амплитудной характеристики нужным образом.
Пусть G(s) = P(s)R(s) – передаточная функция объекта вместе с приводом, причем предполагается, что она не имеет неустойчивых нулей и полюсов (то есть, является минимальнофазовой). ЛАЧХ такого расширенного объекта обозначается как L0(ω) = 20lg |G(jω)|. Если возможно каким-то образом найти желаемую ЛАЧХ LЖ(ω), то разница между этими двумя характеристиками – это и есть ЛАЧХ необходимого последовательного регулятора
 .
.
Таким образом, для решения задачи требуется ответить на два вопроса
1) как выбрать желаемую ЛАЧХ LЖ(jω) так, чтобы обеспечить устойчивость и требуемое качество замкнутой системы?
2) как получить передаточную функцию регулятора C(s) по его ЛАЧХ?
Чтобы ответить на первый вопрос, определяются типичные требования к системе управления:
• устойчивость;
• нулевая ошибка в установившемся режиме;
• быстрый и плавный (в идеале – монотонный) переходный процесс;
• подавление шумов;
• робастность (нечувствительность к ошибкам модели).
Эти требования нужно связать с формой ЛАЧХ.
Постоянный сигнал можно рассматривать как предельный случай гармонического (синуса), только с нулевой частотой. Поэтому для обеспечения нулевой установившейся ошибки цепочка «регулятор-объект» должна иметь бесконечное усиление на нулевой частоте, то есть передаточная функция G(s)C(s) должна содержать интегратор (принцип внутренней модели).
Обычно требуется, чтобы переходный процесс был монотонным, без перерегулирования. Такой процесс дает апериодическое звено. Легко проверить, что передаточная функция апериодического звена (слева) равна передаточной функции интегратора, охваченного единичной обратной связью (справа)
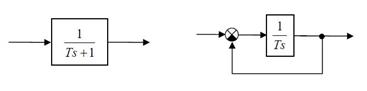
Таким образом, для получения монотонного переходного процесса ЛАЧХ разомкнутой системы должна быть похожа на ЛАЧХ интегратора – это прямая линия с наклоном -20 дБ/дек, которая пересекает ось абсцисс на частоте ωc = 1/T . Эта частота называется частотой среза. Для апериодического звена легко определить время переходного процесса: оно примерно равно 3T. Таким образом, частота среза определяет время переходного процесса. Устойчивость системы также определяется поведением ЛАЧХ в районе частоты среза. В результате
• устойчивость и качество переходного процесса (время, перерегулирование) определяются формой ЛАЧХ в районе частоты среза, где она пересекает ось Lm = 0; эта область называется областью средних частот;
• для получения качественного переходного процесса желательно, чтобы наклон ЛАЧХ около частоты среза был равен -20 дБ/дек;
• если задано время переходного процесса tп, нужно выбирать ωс = 3/ tп.
Шумы – это высокочастотные сигналы. Кроме того, обычно именно в области высоких частот характеристики объекта и модели могут сильно расходиться. Поэтому для подавления помех и уменьшения влияния ошибок модели нужно по возможности уменьшать усиление системы в области высоких частот, то есть ЛАЧХ должна резко идти вниз.
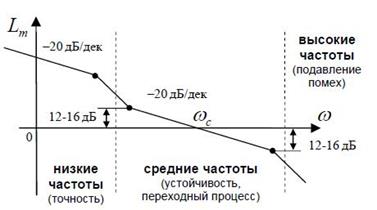
На рисунке показана типовая желаемая ЛАЧХ. Это асимптотическая ЛАЧХ, состоящая из отрезков. В выделенных точках стыкуются два отрезка разного наклона. На низких частотах она имеет наклон -20 дБ/дек, то есть система содержит интегратор, который обеспечивает нулевую ошибку в установившемся режиме. ЛАЧХ пересекает ось абсцисс под наклоном -20 дБ/дек. Для обеспечения устойчивости и приемлемого показателя колебательности (M < 1,2) точки излома ЛАЧХ должны находиться на расстоянии 12-16 дБ от оси абсцисс.
Пример метода коррекции ЛАЧХ. Пусть объект управления – апериодическое звено с передаточной функцией  , где T0 = 5с. Передаточная функция замкнутой системы без коррекции (то есть, с регулятором C0(s)= 1) равна
, где T0 = 5с. Передаточная функция замкнутой системы без коррекции (то есть, с регулятором C0(s)= 1) равна
 .
.
Видно, что статический коэффициент усиления W(0) = 0,5 (а не 1), так что точного отслеживания входного сигнала не получается. Время переходного процесса можно приближенно подсчитать как tп =3⋅0,5⋅T0 = 7,5c.
Требуется выбрать регулятор C(s), который обеспечивает
• нулевую ошибку в установившемся режиме;
• время переходного процесса около 1,5с;
• наклон ЛАЧХ -40 дБ/дек на высоких частотах для подавления помех.
Для решения используется метод коррекции ЛАЧХ. Синяя линия на рисунке обозначает нескорректированную ЛАЧХ, совпадающую с ЛАЧХ апериодического звена G(s).
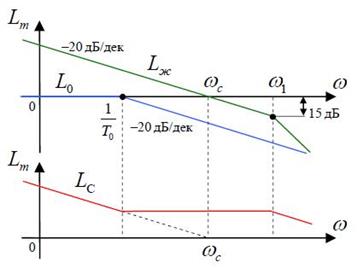
Желаемая ЛАЧХ (зеленая линия) должна иметь наклон -20 дБ/дек на низких частотах, чтобы обеспечить нулевую статическую ошибку. Частота среза ωc определяется требуемым быстродействием: ωc = 3/tп = 2 рад/с. Таким образом, начальный участок желаемой ЛАЧХ совпадает с ЛАЧХ интегрирующего звена с передаточной функцией ωc/s, то есть Lж(ω) = 20lg(ωc/ ω) (на низких частотах).
На высоких частотах нужно изменить наклон ЛАЧХ с -20 до -40 дБ/дек на частоте ω1, где Lm(ω) = -15 дБ. Из этого условия находится
 рад/с.
рад/с.
Таким образом, возможно полностью построить желаемую ЛАЧХ, удовлетворяющую требованиям к системе. Вычитая из нее исходную ЛАЧХ (без коррекции, синяя линия), получим ЛАЧХ регулятора, которая показана красной линией на нижнем графике.
Остается перейти от ЛАЧХ регулятора к его передаточной функции. На низких частотах (ω < 1/T0) ЛАЧХ регулятора имеет наклон -20 дБ/дек и проходит через точку (ωс ; 0), то есть
 ,
,
где C1(s)не изменяет асимптотическую ЛАЧХ на частотах, меньших 1/T0. На частоте ω0 = 1/T0ЛАЧХ регулятора меняет наклон с -20 дБ/дек до нуля, то есть в числитель добавляется множитель T0s + 1
 .
.
Здесь C2(s)– регулятор, не влияющий на ЛАЧХ для частот, меньших ω1. Наконец, на частоте ω1 наклон увеличивается с нуля до -20 дБ/дек. Для того чтобы на этой частоте «загнуть» вниз ЛАЧХ, нужно добавить в регулятор апериодическое звено с постоянной времени T1, где  с. Таким образом, окончательно
с. Таким образом, окончательно
 .
.
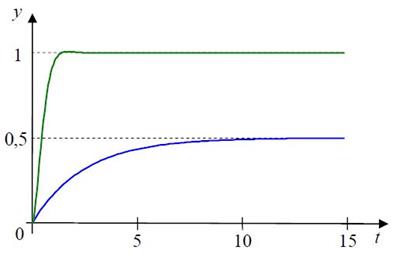
На рисунке показаны переходные процессы при единичном ступенчатом входном сигнале в нескорректированной системе (синяя линия) и в системе с полученным регулятором C(s) (зеленая линия). Графики показывают, что найденный регулятор значительно ускорил переходный процесс и обеспечил нулевую статическую ошибку (установившееся значение выхода равно 1).
Нужно отметить, что алгоритм коррекции ЛАЧХ существенно усложняется, если объект содержит неустойчивые или неминимально-фазовые звенья.
| <== предыдущая лекция | | | следующая лекция ==> |
| Типовая одноконтурная система | | | Начальная обработка основных деталей верхней одежды |
Дата добавления: 2017-05-02; просмотров: 3886;
Поиск по сайту
Узнать еще
- He рекомендуем использовать данный метод, если в дальнейшем будет необходимость прибегнуть к отгибу приборной панели.
- I. История открытия и методы исследования вирусов
- I. Расчёт методом контурных токов.
- I. Судовождение, основанное только на лоцманском методе.
- II. Категории и методы политологии.
- II. Общие методические принципы в канистерапии
- II. Расчёт методом суперпозиции.
- II. Судовождение с использованием лоцманского метода и графического счисления пути судна.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
