Момент силы. Момент импульса.
Пусть некоторое тело под действием силы F, приложенной в точке А, приходит во вращение вокруг оси ОО' (рис. 1.14).
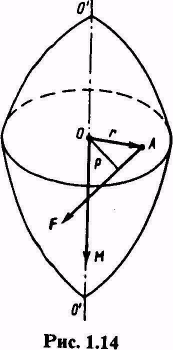 Сила действует в плоскости, перпендикулярной оси. Перпендикуляр р, опущенный из точки О (лежащей на оси) на направление силы, называют плечом силы. Произведение силы на плечо определяет модуль момента силы относительно точки О:
Сила действует в плоскости, перпендикулярной оси. Перпендикуляр р, опущенный из точки О (лежащей на оси) на направление силы, называют плечом силы. Произведение силы на плечо определяет модуль момента силы относительно точки О:
М = Fp=Frsinα.
Момент силы есть вектор, определяемый векторным произведением радиуса-вектора точки приложения силы и вектора силы:
 (3.1)
(3.1)
Единица момента силы — ньютон-метр (Н • м).
Направление М можно найти с помощью правила правого винта.
Моментом импульса частицы называется векторное произведение радиус-вектора частицы на её импульс:
 или в скалярном виде L = гPsinα
или в скалярном виде L = гPsinα
Эта величины векторная и совпадает по направлению с векторами ω.
§ 3.2 Момент инерции. Теорема Штейнера
Мерой инертности тел при поступательном движении является масса. Инертность тел при вращательном движении зависит не только от массы, но и от ее распределения в пространстве относительно оси вращения. Мерой инертности при вращательном движении служит величина, называемая моментом инерции тела относительно оси вращения.
Моментом инерции материальной точки относительно оси вращения называют произведение массы этой точки на квадрат расстояния её от оси:
Ii=miri2 (3.2)
Момент инерции тела относительно оси вращения называют сумму моментов инерции материальных точек, из которых состоит это тело:
 (3.3)
(3.3)
Момент инерции тела зависит от того, относительно какой оси оно вращается и как распределена масса тела по объему.
Наиболее просто определяется момент инерции тел, имеющих правильную геометрическую форму и равномерное распределение массы по объему.
· Момент инерции однородного стержняотносительно оси, проходящей через центр инерции и перпендикулярной стержню
 (3.6)
(3.6)
· Момент инерции однородного цилиндра относительно оси, перпендикулярной его основанию и проходящей через центр инерции,
 (3.7)
(3.7)
· Момент инерции тонкостенного цилиндра или обруча относительно оси, перпендикулярной плоскости его основания и проходящей через его центр,
 (3.8)
(3.8)
· Момент инерции шара относительно диаметра
 (3.9)
(3.9)
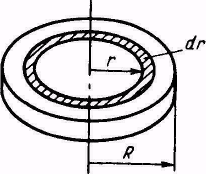
| Рис.3.2 |
Приведенные формулы для моментов инерции тел даны при условии, что ось вращения проходит через центр инерции. Чтобы определить моменты инерции тела относительно произвольной оси, следует воспользоваться теоремой Штейнера: момент инерции тела относительно произвольной оси вращения равен сумме момента инерции тела относительно оси, параллельной данной и проходящей через центр масс тела, и произведения массы тела на квадрат расстояния между осями:
 (3.11)
(3.11)
[m — масса тела, d — расстояние от центра масс до выбранной оси вращения (расстояние между осями)].
Единица момента инерции — килограмм-метр в квадрате (кг • м2).
Так, момент инерции однородного стержня относительно оси, проходящей через его конец, по теореме Штейнера равен
 (3.12)
(3.12)
§ 3.3 Уравнение динамики вращательного движения твердого тела
Рассмотрим вначале материальную точку А массой m, движущуюся по окружности радиусом г (рис. 1.16). Пусть на нее действует постоянная сила F, направленная по касательной к окружности. Согласно второму закону Ньютона, эта сила вызывает тангенциальное ускорение  или F = maτ.
или F = maτ.
Используя соотношение aτ = βr , получаем F = m βr.
Умножим обе части написанного выше равенства на r.
Fr = m βr 2. (3.13)
Левая часть выражения (3.13) является моментом силы: М= Fr. Правая часть представляет собой произведение углового ускорения β на момент инерции материальной точки А: J= m r 2 .
Угловое ускорение точки при ее вращении вокруг неподвижной оси пропорционально вращающему моменту и обратно пропорционально моменту инерции (основное уравнение динамики вращательного движения материальной точки):
М = β J или  (3.14)
(3.14)
При постоянном моменте вращающей силы угловое ускорение будет величиной постоянной и его можно выразить через разность угловых скоростей:
 (3.15)
(3.15)
Тогда основное уравнение динамики вращательного движения можно записать в виде
 или
или  (3.16)
(3.16)
[  —момент импульса (или момент количества движения), МΔt — импульс момента сил (или импульс вращающего момента)].
—момент импульса (или момент количества движения), МΔt — импульс момента сил (или импульс вращающего момента)].
Основное уравнение динамики вращательного движения можно записать в виде
 (3.17)
(3.17)
§ 3.4 Закон сохранения момента импульса
Рассмотрим частый случай вращательного движения, когда суммарный момент внешних сил равен нулю. При вращательном движении тела каждая его частица движется с линейной скоростью υ = ωr, [r, — радиус окружности, которую описывает частица массой m, ω — угловая скорость, одинаковая для всех точек тела].
Момент импульса вращающегося тела равен сумме моментов
импульсов отдельных его частиц:
 (3.18)
(3.18)
Изменение момента импульса равно импульсу момента сил:
dL=d(Jω)=Jdω=Mdt (3.19)
Если суммарный момент всех внешних сил, действующих на систему тела относительно произвольной неподвижной оси, равен нулю, т.е. М=0, то dL и векторная сумма моментов импульсов тел системы не изменяется с течением времени.
Сумма моментов импульсов всех тел изолированной системы сохраняется неизменной (закон сохранения момента импульса):
d(Jω)=0 Jω=const (3.20)
Согласно закону сохранения момента импульса можно записать
J1ω1= J2ω2 (3.21)
где J1 и ω1 - момент инерции и угловая скорость в начальный момент времени, а и J2 и ω2 – в момент времени t.
Из закона сохранения момента импульса следует, что при М=0 в процессе вращения системы вокруг оси любое изменение расстояния от тел до оси вращения должно сопровождаться изменением скорости их обращения вокруг этой оси. С увеличением расстояния скорость вращения уменьшается, с уменьшением – возрастает. Например, гимнаст, совершающий сальто, чтобы успеть сделать в воздухе несколько оборотов, во время прыжка свёртывается клубком. Балерина или фигуристка, кружась в пируэте, разводит руки если хочет замедлить вращение, и, наоборот, прижимает их к телу, когда старается вращаться как можно быстрее.
§ 3.5 Кинетическая энергия вращающегося тела
Определим кинетическую энергию твёрдого тела, вращающегося вокруг неподвижной оси. Разобьем это тело на n материальных точек. Каждая точка движется с линейной скоростью υi=ωri, тогда кинетическая энергия точки
 или
или 
Полная кинетическая энергия вращающегося твердого тела равна сумме кинетических энергий всех его материальных точек:
 (3.22)
(3.22)
(J - момент инерции тела относительно оси вращения)
Если траектории всех точек лежат в параллельных плоскостях (как у цилиндра, скатывающегося с наклонной плоскости, каждая точка перемещается в своей плоскости рис ), это плоское движение. В соответствии с принципом Эйлера плоское движение всегда можно бесчисленным количеством способов разложить на поступательное и вращательное движение. Если шарик падает или скользит вдоль наклонной плоскости, он двигается только поступательно; когда же шарик катится – он ещё и вращается.
Если тело совершает поступательное и вращательное движения одновременно, то его полная кинетическая энергия равна
 (3.23)
(3.23)
Из сопоставления формул кинетической энергии для поступательного и вращательного движений видно, что мерой инертности при вращательном движении служит момент инерции тела.
§ 3.6 Работа внешних сил при вращении твёрдого тела
При вращении твёрдого тела его потенциальная энергия не изменяется, поэтому элементарная работа внешних сил равна приращению кинетической энергии тела:
ΔA = ΔE или 
Учитывая, что Jβ = M, ωdr = dφ, имеем
ΔA =MΔφ (3.24)
Работа внешних сил при повороте твёрдого тела на конечный угол φ равна
При вращении твёрдого тела вокруг неподвижной оси работа внешних сил определяется действием момента этих сил относительно данной оси. Если момент сил относительно оси равен нулю, то эти силы работы не производят.
| <== предыдущая лекция | | | следующая лекция ==> |
| СУЩНОСТЬ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ ЛИТЬЯ | | | Строение среднего уха. |
Дата добавления: 2017-03-12; просмотров: 18628;
Поиск по сайту
Узнать еще
- Andante cantabile С. Рахманинов. Музыкальный момент op. 16, № 3
- I.2.3 МАССА. ЦЕНТР МАСС. ИМПУЛЬС. ЗАКОН СОХРАНЕНИЯ ИМПУЛЬСА. ПЛОТНОСТЬ
- I.4.1 МОМЕНТ СИЛЫ И МОМЕНТ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- IV. Электромагнитный момент
- Алгебраический момент силы относительно точки
- Анализ подъёмной силы.
- Антропогенез. Движущие силы. Роль законов общественной жизни в социальном поведении человека

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
