Двигатель параллельного возбуждения
Для пуска в ход двигателей постоянного тока применяют двух-, трех- и четырехзажимные пусковые реостаты. На рис. 6.4 представлена схема включения трехзажимного пускового реостата для двигателя параллельного возбуждения.
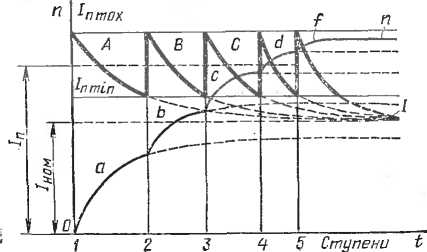
Рис. 6.5. Диаграмма процесса пуска двигателя в ход
Реостат имеет шесть контактов: пять рабочих (1, 2, 3, 4, 5) и один холостой (нулевой 0); три зажима Л, Ш, Я, которые соответственно подключаются к линии, обмотке возбуждения и к якорю. Скользящий контакт реостата перемещается по неподвижным контактам и контактной дуге Д, благодаря которой обмотка возбуждения оказывается включенной на полное напряжение сети. Регулировочный реостат в цепи возбуждения rрг следует вывести, так как в этом случае ток возбуждения Iв, магнитный поток Ф и вращающий момент двигателя достигают наибольшей величины, что облегчает пуск двигателя в ход. Пусковой реостат рассчитывают на кратковременный режим работы, когда количество его секций определяется условиями плавности пуска двигателя. Так как в первый момент пуска n = 0, то и противо - э. д. с. Ея = 0, и Iп.mах = Uс/(Rя+∑Rп), где Rп — сумма сопротивлений всех секций пускового реостата.
Пусковой реостат можно рассчитать так, чтобы при последовательном выключении его секций пусковой ток изменялся в пределах от Iп-max до Iп-min. В этом случае Iп = 0,5 (Iп-mах+Iп-min) , На рис. 6.5 показана диаграмма реостатного пуска двигателя. После того как с увеличением частоты вращения пусковой ток уменьшится до значения Iп-min, рукоятку реостата переводят на второй контакт, выводя тем самым сопротивление первой секции. Пусковой ток снова возрастает до Iп-mах, после чего частота вращения двигателя начнет возрастать по кривой b, а ток — уменьшаться по кривой В. В дальнейшем пусковой процесс идет в том же порядке до тех пор, пока не будет выведен весь реостат, после чего двигатель будет работать в установившемся режиме при токе I и частоте вращения п. Останавливают двигатель быстрым переводом рукоятки пускового реостата в нулевое положение и отключением рубильника Р (рис. 6.4). ,
Рабочие характеристики двигателя. Они имеют вид п; М; η = f(Iя) при U = Uном = const и Tв = const. Схема двигателя показана на рис. 6.6, а; реостат в цепи возбуждения rрг должен быть отрегулирован так, чтобы двигатель развивал номинальную мощность Рном при номинальных значениях напряжения Uном тока Iноми частоте вращения пном. В этом положении реостат должен оставаться в неизменном положении. Рабочие характеристики показаны на рис. 6.6, б. Частота вращения якоря n=(U — Iя/Rя)/(сеФ); так как, по условию, величины U и Iв являются постоянными, то в этих условиях на частоту вращения двигателя влияют незначительно два факта: падение напряжения в якоре IяRя и реакция якоря. При увеличении тока нагрузки Iя падение напряжения увеличивается, а частота вращения уменьшается. Одновременно реакция якоря размагничивает двигатель, т. е. приводит к уменьшению магнитного потока главных полюсов и, следовательно, стремится увеличить его частоту вращения. Таким образом, указанные факты оказывают противоположные влияния на частоту вращения якоря и е зависимости от преобладания одного из этих факторов происходит уменьшение или увеличение частоты вращения при нагрузке двигателя.
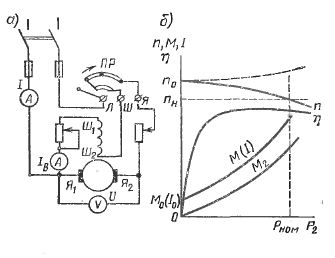
Рис. 6.6. Схема двигателя параллельного возбуждения (я) и его рабочие характеристики (б)
Чтобы работа двигателей параллельного возбуждения была устойчива даже при преобладании реакции якоря, необходимо ставить на главных полюсах стабилизирующую обмотку, которая соединяется последовательно с обмоткой якоря и включается согласно с параллельной обмоткой возбуждения. В этом случае при увеличении тока нагрузки размагничивающее действие реакции якоря компенсируется намагничивающим действием стабилизирующей обмотки. Таким образом, внешняя характеристика двигателя параллельного возбуждения n = fIя) имеет вид почти прямой линии, слабо наклоненной к оси абсцисс. Изменение частоты вращения при увеличении нагрузки от нуля до номинальной составляет от 2% до 8%. Подобный вид внешней характеристики составляет одно из наиболее отличительных свойств двигателя параллельного возбуждения; такую характеристику называют жесткой. Зная характер зависимости n = f(Iя), нетрудно объяснить характеристику вращающего момента М = f(Iя).
Согласно уравнению моментов, при установившемся режиме работы имеем: М = смIяФ = М0 + М2 = Мст. При холостом ходе М = М0 = смI0Ф. Если бы поток возбуждения оставался постоянным, то характеристика M = f(Iя) представляла бы прямую линию. В действительности же поток Ф при увеличении тока Iя несколько уменьшается в результате размагничивающего действия поперечной реакции якоря, поэтому характеристика M=f(Iя) несколько отклоняется от прямой линии к оси тока. Характеристика полезного момента М2= f(Iя) должна идти ниже характеристики М = f(Iя) на величину момента холостого хода М0, который практически не зависит от нагрузки. На рис. 7.6, б представлена также кривая зависимости коэффициента полезного действия от нагрузки η = f(Iя). К. п. д. быстро увеличивается в пределах от I = I0 до I  0,25Iном, достигает максимума примерно при I
0,25Iном, достигает максимума примерно при I  0,5Iном, а затем в пределах изменения нагрузки от I 0,5 Iномдо I = Iном остается почти постоянным. Из графика к. п. д. видно, что для работы электродвигателя с высоким к. п. д. надо стремиться к его номинальной загрузке. Обычно в двигателях малой мощности η = 75
0,5Iном, а затем в пределах изменения нагрузки от I 0,5 Iномдо I = Iном остается почти постоянным. Из графика к. п. д. видно, что для работы электродвигателя с высоким к. п. д. надо стремиться к его номинальной загрузке. Обычно в двигателях малой мощности η = 75  85%, в двигателях средней и большей мощности η = 85 94 %
85%, в двигателях средней и большей мощности η = 85 94 %
Регулировочные характеристики. Одним из основных достоинств двигателей постоянного тока является возможность плавного регулирования частоты вращения в широких пределах. В общем случае в цепь якоря двигателя может быть включен регулировочный реостат Rрг, Тогда из формулы  следует, что частоту вращения двигателей постоянного тока можно регулировать:
следует, что частоту вращения двигателей постоянного тока можно регулировать:
1) изменением напряжения сети U;
2) изменением падения напряжения в сопротивлениях цепи якоря  ;
;
3) изменением потока возбуждения, а следовательно, изменением тока возбуждения I в. Первый способ возможен только в специальных установках, допускающих регулирование напряжения сети U. Реостат Rрг в цепи якоря должен быть подобран так, чтобы можно было регулировать частоту вращения в желаемых пределах. Предположим, что напряжение сети и ток возбуждения остаются постоянными, т. е. U = const и Iв= const, кроме того, статический момент Мст = М0 + М2 не зависит от частоты вращения двигателя. При выведенном реостате Rрг установившийся режим работы двигателя характеризуется вращающим моментом М2, частотой вращения n1 и током в цепи якоря I21 Сразу же после введения регулировочного реостата Rрг частота вращения и противо-э. д. с. остаются без изменения вследствие значительного момента инерции якоря, а ток в цепи якоря уменьшается до значения I21  Соответственно уменьшается и вращающий момент двигателя.
Соответственно уменьшается и вращающий момент двигателя.
Превышение нагрузочного момента над вращающим моментом приводит к снижению частоты вращения якоря, уменьшению противо-э. д. с. и увеличению тока в цепи якоря (рис. 6.7). Новое значение тока I22 и частота вращения п2 устанавливаются при равенстве вращающего момента двигателя и нагрузочного момента приводимого им во вращение механизма. При постоянном токе возбуждения и нагрузочном моменте М2 установившееся значение тока в цепи якоря I22 = I21 и частота вращения якоря  . Подведенная к двигателю мощность Р1 = = U(Iя + Iв) в установившихся режимах сохраняется неизменной. Полезная мощность Р2= M2𝛺 =M22
. Подведенная к двигателю мощность Р1 = = U(Iя + Iв) в установившихся режимах сохраняется неизменной. Полезная мощность Р2= M2𝛺 =M22  n2/60 уменьшается пропорционально частоте вращения.
n2/60 уменьшается пропорционально частоте вращения.

Рис. 6.7. Процесс регулирования частоты вращения реостатом в цепи якоря (а) и в цепи возбуждения (б)
Недостатки этого способа регулирования частоты вращения — малая экономичность и ухудшение условий охлаждения, поэтому его применяют, главным образом, для регулирования частоты вращения двигателей малой мощности. Если двигатель работает в установившемся режиме при неизменном напряжении на зажимах якоря и токе в обмотке возбуждения, то для необходимого вращающего момента М2 по соответствующим рабочим характеристикам могут быть определены частота вращения  , ток I21 в цепи якоря и вычислена противо-э. д. с. Е21. При уменьшении тока возбуждения до значения Iв2 уменьшается магнитный поток. Вследствие значительного момента инерции якоря частота вращения его сразу же после изменения тока возбуждения остается прежней, противо-э. д. с. уменьшается до значения Е21´ пропорционально магнитному потоку, ток в цепи якоря увеличивается до значения I21´= (U - E21')/Rя. Так как падение напряжения в цепи якоря составляет небольшую часть напряжения сети, то относительное увеличение тока (I21´ - I21)/ I21 =(E21 - E21')/( U - E21) = (E21 - E21')/(IяRя) значительно превосходит относительное уменьшение магнитного потока. Это приводит к увеличению вращающего момента и к ускорению вращения якоря. Противо-э. д. с. в обмотке якоря увеличивается, ток уменьшается, пока не наступит равновесие между вращающим моментом двигателя и нагрузочным моментом приводимого им во вращение механизма при новых установившихся значениях тока I22 и частоте вращения п2 (рис. 6.7). Подведенная к двигателю мощность Р1 = U (Iя+Iв) и полезная мощность Р2 = M22 n2/60 увеличиваются в одинаковой мере, следовательно, к. п. д. двигателя при этом способе регулирования частоты вращения практически не изменяется. Зависимость частоты вращения п от величины тока возбуждения Iв выражается регулировочной характеристикой двигателя п = =f (Iв) при Iя = const и U = const.
, ток I21 в цепи якоря и вычислена противо-э. д. с. Е21. При уменьшении тока возбуждения до значения Iв2 уменьшается магнитный поток. Вследствие значительного момента инерции якоря частота вращения его сразу же после изменения тока возбуждения остается прежней, противо-э. д. с. уменьшается до значения Е21´ пропорционально магнитному потоку, ток в цепи якоря увеличивается до значения I21´= (U - E21')/Rя. Так как падение напряжения в цепи якоря составляет небольшую часть напряжения сети, то относительное увеличение тока (I21´ - I21)/ I21 =(E21 - E21')/( U - E21) = (E21 - E21')/(IяRя) значительно превосходит относительное уменьшение магнитного потока. Это приводит к увеличению вращающего момента и к ускорению вращения якоря. Противо-э. д. с. в обмотке якоря увеличивается, ток уменьшается, пока не наступит равновесие между вращающим моментом двигателя и нагрузочным моментом приводимого им во вращение механизма при новых установившихся значениях тока I22 и частоте вращения п2 (рис. 6.7). Подведенная к двигателю мощность Р1 = U (Iя+Iв) и полезная мощность Р2 = M22 n2/60 увеличиваются в одинаковой мере, следовательно, к. п. д. двигателя при этом способе регулирования частоты вращения практически не изменяется. Зависимость частоты вращения п от величины тока возбуждения Iв выражается регулировочной характеристикой двигателя п = =f (Iв) при Iя = const и U = const.
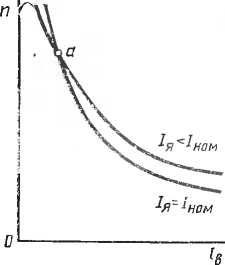
Рис. 6.8. Регулировочная характеристика двигателя
На рис. 6.8 представлены две регулировочные характеристики двигателя, снятые при различных значениях тока якоря: при Iя < Iном и при Iя = Iном .
Из этих характеристик видно, что. при малом значении тока возбуждения, а тем более при обрыве цепи возбуждения Iв = 0 частота вращения неограниченно возрастает, что приводит к «разносу» двигателя.
Дата добавления: 2022-04-12; просмотров: 569;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
