Классификация и характеристики двигателей постоянного тока
В зависимости от способа включения обмотки возбуждения и обмотки якоря различают следующие типы двигателей постоянного тока:
1) параллельного возбуждения;
2) последовательного возбуждения;
3) смешанного возбуждения, в которых имеются две обмотки возбуждения: параллельная и последовательная. Двигатели постоянного тока оцениваются по совокупности следующих видов характеристик: пусковых, рабочих, регулировочных и механических.
Пусковые характеристики. Пусковые характеристики определяются следующими величинами:
а) пусковым током Iпуск, характеризуемым отношением Iпуск/Iном;
б) пусковым моментом Мпуск, характеризуемым отношением Мпуск/Мном;
в) плавностью пусковой операции;
г) временем пуска в ход tпуск;
д) экономичностью операции, определяемой стоимостью пусковой аппаратуры.
В начальный момент пуска двигателя его якорь неподвижен, противо – э.д.с. в обмотке якоря равна нулю и ток в якоре двигателя Iя = Uс/Rя. Сопротивление цепи якоря невелико, поэтому пусковой ток превышает номинальный в 20 и более раз. Резкий скачок тока при пуске создает на валу двигателя большой пусковой момент, который может вызвать механические разрушения как самого двигателя, так и исполнительного механизма, привести к резкому падению напряжения в сети и вызвать интенсивное искрение под щетками.
Поэтому при пуске двигателя в ход для ограничения пускового тока применяют пусковые реостаты, включаемые последовательно в цепь якоря (рис. 6.4). По мере увеличения частоты вращения якоря противо - э.д. с. увеличивается, а ток якоря уменьшается, поэтому сопротивление реостата следует уменьшить так, чтобы в конце пуска оно было полностью выведено и чтобы пусковой ток превышал номинальный не более чем в два-три раза.
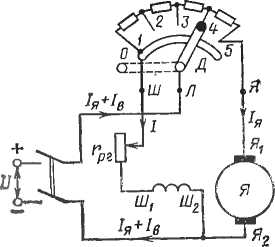
Рис. 6.4. Схема включения пускового реостата в цепь двигателя параллельного возбуждения
Рабочие характеристики. Под рабочими характеристиками понимают зависимости частоты вращения, вращающего момента и к.п.д. от полезной мощности на валу или от тока якоря п; М и  = f(Р2) или f(Iя) при U= Uном = const и номинальном токе возбуждения. Частоту вращения п определяют из уравнения э.д.с. Uс=Ея+IяRя = сеnФ+IяRя, откуда n= (Uc - IяRя)/(сеФ). Так как Uc = const, то форма частотной характеристики зависит только от падения напряжения IЯRЯ и изменения потока Ф.
= f(Р2) или f(Iя) при U= Uном = const и номинальном токе возбуждения. Частоту вращения п определяют из уравнения э.д.с. Uс=Ея+IяRя = сеnФ+IяRя, откуда n= (Uc - IяRя)/(сеФ). Так как Uc = const, то форма частотной характеристики зависит только от падения напряжения IЯRЯ и изменения потока Ф.
Регулировочные характеристики. Эти характеристики определяют свойства двигателей при регулировании частоты вращения. К ним относятся:
а) пределы регулирования, определяемые отношением nмакс/nмин
б) экономичность регулирования (первоначальные затраты ка оборудование и последующие эксплуатационные расходы);
в) характер регулирования — плавный или ступенчатый;
г) простота регулировочной аппаратуры и операций по регулированию частоты вращения. Двигатели постоянного тока обладают многообразными и гибкими регулировочными характеристиками и поэтому являются незаменимыми в установках с широко регулируемой частотой вращения. Механические характеристики. Для электропривода производственных механизмов важное значение имеют механические характеристики, представляющие собой зависимость n = f(M) при Uc = const и постоянном сопротивлении в цепи якоря (при условии, что регулирование тока в цепи возбуждения двигателя не производится).
Дата добавления: 2022-04-12; просмотров: 469;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
