Общие сведения о двигателях постоянного тока
Двигатели постоянного тока находят широкое применение в промышленных, транспортных, крановых и других установках, где требуется широкое плавное регулирование частоты вращения. Одна и та же электрическая машина может работать как в режиме генератора, так и в режиме двигателя.
Это свойство электрических машин называют обратимостью. Предположим, что к двигателю подведено напряжение Uсети = const. При заданной на рис. 6.1 полярности полюсов и направлении тока Iя в якоре (обмотка якоря показана только одним проводником) на валу двигателя создается вращающий электромагнитный момент М, направленный против вращения часовой стрелки. Под действием этого момента двигатель вращается в направлении момента с постоянной частотой п.
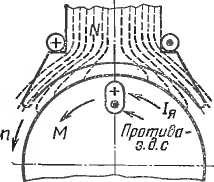
Рис. 6.1. Направление момента и противо-э. д. с. обмотки якоря двигателя
Применяя правила правой руки, находим, что в проводнике (обмотке) якоря наводится э. д. с. ея, направленная встречно относительно тока якоря, и поэтому ее называют противо - э. д. с. якоря и рассматривают как электромагнитное противодействие двигателя относительно напряжения сети Uсети. Для двигателя, работающего с постоянной частотой вращения, можно составить уравнение э. д. с.
 (6.1)
(6.1)
где Ея и Iя — э.д.с и ток, соответствующие установившемуся режиму работы;  — падение напряжения в сопротивлениях цепи якоря двигателя.
— падение напряжения в сопротивлениях цепи якоря двигателя.
Уравнение моментов двигателя. Электромагнитный момент двигателя
 (6.2)
(6.2)
создается в результате взаимодействия основного магнитного поля Ф и тока в обмотке якоря Iя и расходуется на преодоление тормозящих моментов:
1) момента х.х. М0;
2) полезного момента М2;
3) динамического момента Mj.
Момент х.х. Мо существует при любом режиме работы двигателя и определяется трением в подшипниках, трением щеток о коллектор, вентиляционными потерями и потерями в стали. Полезный момент М2 определяется свойствами рабочей машины и характером производственного процесса. Динамический момент возникает при всяком изменении частоты вращения двигателя
 (6.3)
(6.3)
где J — момент инерции всех вращающихся частей; 𝛺 — угловая скорость вращения якоря.
Если частота вращения двигателя увеличивается, то момент Еj, положителен и, складываясь с моментами М0 и М2, увеличивает тормозной момент на валу двигателя. При уменьшении п момент Mj отрицателен и уменьшает общий тормозной момент. Зависимость между вращающим и тормозным моментами двигателя на его валу определяется законом равновесия моментов: в любых условиях работы двигателя эти моменты находятся во взаимном равновесии, т. е. равны друг другу по величине, но направлены в противоположные стороны. При п = const момент Мj = 0 и тогда
 (6.4)
(6.4)
где Мст — статический момент сопротивления на валу двигателя.
Следовательно, двигатель работает устойчиво и вращается с постоянной частотой, если развиваемый и вращающий момент равен противодействующему моменту М = Мст. Точкой установившегося режима работы двигателя является точка пересечения механических характеристик электродвигателя M = f(n) и исполнительного механизма Mct = f(n).
Если двигатель и приводимый им во вращение исполнительный механизм имеют механические характеристики M = f(n) и Mст = f(n) (рис. 6.2, а), то при случайном увеличении частоты вращения от п до п' равенство моментов нарушится. Момент, развиваемый двигателем, уменьшится и станет меньше тормозного (М'<Мст). Поэтому двигатель будет затормаживаться до значения п, при котором М = Мст. Наоборот, при случайном уменьшении частоты п до значения п" вращающий момент двигателя М" становится больше противодействующего момента М"ст, и якорь двигателя получает ускорение, возвращающее его к исходной частоте п. Таким образом, в рассматриваемом случае работа двигателя устойчива, так как (dM/dn) < (dMст/dn). Если же механические характеристики M = f(n) и Mст = f(n) имеют вид, показанный на рис. 6.2, б, работа электродвигателя становится неустойчивой. Действительно, при случайном изменении частоты вращения от п до п' избыточный вращающий момент двигателя М' вызывает дальнейшее увеличение частоты вращения. Если же произойдет изменение частоты вращения от п до п", то избыточный противодействующий момент вызывает дальнейшее уменьшение частоты вращения, следовательно, работа двигателя будет неустойчивой, так как (dm/dn)>>(dMст/dn).
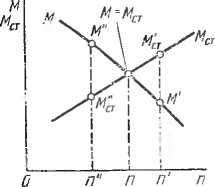
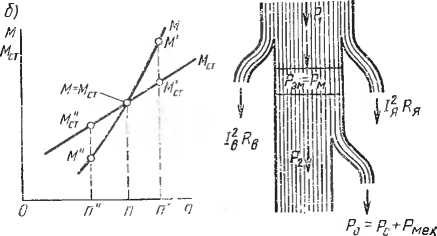
Рис. 6.2. К понятию об устойчивой работе двигателя
Рис. 6.3. Энергетическая диаграмма двигателя параллельного возбуждения
Энергетическая диаграмма двигателя. На рис. 6.3 изображена энергетическая диаграмма двигателя параллельного возбуждения, работающего в установившемся режиме, т. е. при n = const. К двигателю из сети подводится мощность P1 = UcI, которая покрывает потери в цепи возбуждения I2вРв и электрические потери в цепи якоря I2яРя а оставшаяся ее часть составляет электромагнитную мощность якоря Рэм=ЕяIя, преобразующуюся в полную механическую мощность Рм двигателя. Полезная механическая мощность на валу двигателя Р2 меньше полной механической мощности Рм на величину мощности Р0, необходимой для покрытия потерь в стали Рс и механических потерь Рмех, т. е.
Р2 = РМ - (Рс + Рмсх).
Дата добавления: 2022-04-12; просмотров: 301;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
