Измерительные приборы и системы астатического уравновешивания
Принципиальное отличие астатического уравновешивания заключается в том, что цепь прямого преобразования снабжается элементом памяти, запоминающим выходную величину. В этом случае для ее поддержания на заданном уровне никакого воздействия на вход прямой цепи подавать не требуется, а входное воздействие  используется лишь для перестройки выходного сигнала на новое значение.
используется лишь для перестройки выходного сигнала на новое значение.
Общая структурная схема измерительного прибора астатического следящего уравновешивания может быть представлена как показано на рис. 6.13 и отличается от схемы статического уравновешивания элементом памяти ЭП (рис. 6.13).
Примером прибора астатического уравновешивания является рассмотренный выше термоанемометрический датчик угла атаки, а также самоуравновешивающийся мост с термочувствительным элементом (рис. 6.14).
Погрешности измерительных приборов и систем астатического уравновешивания, также как и приборов со статическим уравновешиванием складывается из аддитивных и мультипликативных составляющих, однако по составу они несколько отличается.
Основным отличием астатического уравновешивания от статического является другая зависимость погрешности от неполной уравновешенности в функции значения измеряемой величины.
 |
Рис.6.13. Общая структурная схема прибора астатического уравновешивания.
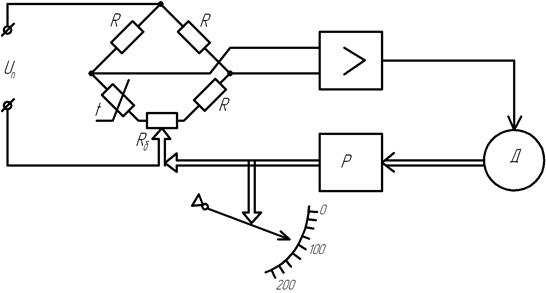
Рис.6.14. Принципиальная схема термометра астатического уравновешивания
При статическом уравновешивании неуравновешенность Δx обусловлена необходимостью поддержания на выходе требуемого значения y, она всегда постоянна по знаку и является систематической и поэтому легко устраняется при градуировке.
При астатическом уравновешивании систематическая неуравновешенность отсутствует, однако полного уравновешивания также не достигается, так как двигатель имеет некоторый порог трогания (счетчик импульсов при цифровом уравновешивании имеет некоторую дискретность). Вследствие этого погрешность от неполного уравновешивания может быть как положительной, так и отрицательной.
С учетом этого соотношение между x и x1 можно записать как
 (6.65)
(6.65)
где  – погрешность от порога трогания двигателя, приведенная ко входу цепи прямого преобразования (
– погрешность от порога трогания двигателя, приведенная ко входу цепи прямого преобразования (  ).
).
Кроме того, от дрейфа нуля прямой цепи на величину  положение равновесия также случайным образом смещается на величину
положение равновесия также случайным образом смещается на величину  . Поэтому более точно соотношение между x и x1 определяется как
. Поэтому более точно соотношение между x и x1 определяется как
 .
.
Преобразование y в x1 также сопровождается случайной аддитивной  и мультипликативной
и мультипликативной  погрешностями. Поэтому уравнение цепи обратного преобразования можно представить как
погрешностями. Поэтому уравнение цепи обратного преобразования можно представить как
 (6.66)
(6.66)
Отсюда связь между входной величиной x и ее градуировочной характеристикой в виде x1 с учетом всех случайных погрешностей будет
 (6.67)
(6.67)
где 
Приведенная ко входу погрешность  будет равна
будет равна
 (6.68)
(6.68)
Учитывая, что в силу статической независимости все эти случайные составляющие должны складываться по правилу суммирования некоррелированных случайных погрешностей, то суммарная погрешность в этом случае определяется выражением
 (6.69)
(6.69)
(!!!Из этой формулы не ясно, как именно влияют на суммарную погрешность законы распределения каждой из случайных погрешностей или же какое число этих погрешностей должно быть. По всей видимости упущены условия при которых это выражение справедливо).
Следовательно, при астатическом уравновешивании три составляющие погрешности – аддитивные Δβа, Δка, Δтра и лишь одна – мультипликативная  . Общая величина погрешности может быть уменьшена за счет уменьшения аддитивных составляющих Δβа, Δка, Δтра путем повышения коэффициента усиления K цепи прямого преобразования. Однако увеличение K ограничено, т.к. может вызвать возникновение автоколебаний.
. Общая величина погрешности может быть уменьшена за счет уменьшения аддитивных составляющих Δβа, Δка, Δтра путем повышения коэффициента усиления K цепи прямого преобразования. Однако увеличение K ограничено, т.к. может вызвать возникновение автоколебаний.
Основными достоинствами измерительных приборов и систем с астатическим уравновешиванием являются:
1. Возможность прямого отсчета измеряемой величины по углу поворота двигателя (или коду счетчика);
2. Большой устанавливающий момент на валу двигателя, что обеспечивает возможность дублирования выхода.
Недостатком таких приборов является очень малое быстродействие и опасность возникновения автоколебаний. Для устранения автоколебаний прямую цепь охватывают скоростной отрицательной обратной связью, используя для этого тахогенератор, установленный на валу с двигателя.
Дата добавления: 2020-10-25; просмотров: 424;
Поиск по сайту
Узнать еще
- F45.38 другие органы или системы
- I. История возникновения и развития классно-урочной системы.
- I. Развитие Донбасса в условиях кризиса феодально-крепостнической системы
- I. Создание системы управленческого учета.
- III. Филогенез эндокринной системы.
- IV. Движение поездов при неисправности электрожезловой системы и порядок регулировки количества жезлов в жезловых аппаратах
- L.3. Состояние российской системы образования и необходимость ее
- T-FlexCAD (Топ Системы, Москва) и др.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
