Различные способы задания прямой
Пусть  - прямая в пространстве, точка
- прямая в пространстве, точка  - некоторая точка этой прямой. Любой ненулевой вектор
- некоторая точка этой прямой. Любой ненулевой вектор  , параллельный этой прямой, называется ее направляющимвектором .
, параллельный этой прямой, называется ее направляющимвектором .
Ясно, что прямая имеет бесконечное множество направляющих векторов, любые два из которых коллинеарны.
Тогда  векторы
векторы  и коллинеарны:
и коллинеарны:
=  , где
, где  (1)
(1)
Таким образом, чтобы задать прямую достаточно задать ее точку и направляющий вектор . =  .
.
Формула(1) устанавливает взаимно однозначное соответствие между точками прямой и значением параметра . Параметр  является координатой точки
является координатой точки  в системе координат
в системе координат  на прямой .
на прямой .
Возьмем какую-либо аффинную систему координат  в пространстве, и пусть относительно ее точки и
в пространстве, и пусть относительно ее точки и  имеют координаты
имеют координаты


 
 

|  , ,  . Вектор разложим по векторам базиса . Вектор разложим по векторам базиса  : :
 .
Сравнивая одноименные координаты векторов в формуле (1), получим: .
Сравнивая одноименные координаты векторов в формуле (1), получим:
|
 ,
,
 , (2)
, (2)
 .
.
Обратно (2)  (1). Таким образом , уравнения (2) определяют прямую в пространстве. Они называются параметрическимиуравнениямипрямой.
(1). Таким образом , уравнения (2) определяют прямую в пространстве. Они называются параметрическимиуравнениямипрямой.
2. Если  , то исключая
, то исключая  из уравнений (2), получим
из уравнений (2), получим  (3).
(3).
Если одна из координат направляющего вектора прямой равна нулю, например,  , то
, то
(2) 


 d
d


| В этом случае прямая параллельна плоскости  ( в частности ( в частности  . Действительно, пусть . Действительно, пусть  , тогда , тогда  Так как Так как  то то  . .
|
Если две координаты направляющего вектора прямой равны нулю, например,  , то
, то  и
и
(2)  ,
, 
В этом случае прямая  , в частности
, в частности  .
.
Уравнения (3), , называются каноническимиуравнениями прямой.
3. Прямая будет определена, если задать две её различные точки  и
и  . Вектор
. Вектор 
 служит направляющим вектором этой прямой.
служит направляющим вектором этой прямой.
Уравнения прямой  можно записать в виде (2) и (3):
можно записать в виде (2) и (3):

 ,
,
 и
и
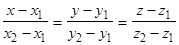 ,
,  .
.
4. Прямая может быть задана как линия пересечения двух плоскостей  и
и  :
:  . Пусть в аффинной системе координат плоскости и определяются уравнениями:
. Пусть в аффинной системе координат плоскости и определяются уравнениями:
 ,
,  (4)
(4)
 (условие пересечения и )
(условие пересечения и )
Система уравнений (4) определяет прямую . Координаты  точки
точки  являются решением системы уравнений (4).
являются решением системы уравнений (4).
Если - какое -либо решение системы (4) то эта система равносильна системе уравнений


Общее решение системы имеет вид:
 ,
,  ,
, 
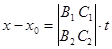
Отсюда  ,
,  ,
,  (5)
(5)
Уравнения (5) являются параметрическими уравнениями прямой  . Направляющий вектор прямой имеет координаты:
. Направляющий вектор прямой имеет координаты:


 (определенные с точностью до общего множителя
(определенные с точностью до общего множителя  ).
).
В прямоугольной системе координат 
 ,где
,где 
 - векторы нормалей плоскостей и соответственно
- векторы нормалей плоскостей и соответственно  ,
,  ).
).
§14. Взаимное расположение прямой и плоскости.
Пусть имеем прямую d, заданную уравнениями

 (1)
(1)

и плоскость П, заданную уравнением:
 (2)
(2)
относительно аффинной системы координат  . Будем искать общие точки прямой d и плоскости П. Для этого нужно решить систему уравнений (1) и (2). Заменяя х, у, z в уравнении (2) по формулам (1), получим:
. Будем искать общие точки прямой d и плоскости П. Для этого нужно решить систему уравнений (1) и (2). Заменяя х, у, z в уравнении (2) по формулам (1), получим:
 (3)
(3)
Здесь возможны случаи:
1)  (4) <=> система уравнений (1), (2) имеет единственное решение. Таким образом, условие (4) является необходимым и достаточным условием пересечения прямой d и плоскости П . В прямоугольной системе координат
(4) <=> система уравнений (1), (2) имеет единственное решение. Таким образом, условие (4) является необходимым и достаточным условием пересечения прямой d и плоскости П . В прямоугольной системе координат оно имеет простой геометрический смысл: скалярное произведение
оно имеет простой геометрический смысл: скалярное произведение  направляющего вектора
направляющего вектора  прямой d и вектора нормали
прямой d и вектора нормали  плоскости П отлично от нуля. Следовательно, векторы и
плоскости П отлично от нуля. Следовательно, векторы и  не ортогональны.
не ортогональны.
В частности, прямая d перпендикулярна плоскости П тогда и только тогда, когдавекторы и коллинеарны, т.е. когда
2.  ,
,  (5)
(5)
Следовательно, уравнение (3) не имеет решений, а, значит, и система (1),(2) не имеет решения. Таким образом, условия (5) являются необходимыми и достаточными условиями того, что  (прямая и плоскость параллельны).
(прямая и плоскость параллельны).
В прямоугольной системе координат они означают, что
 где
где  .
.
3)  (6)
(6)
Уравнение (3) удовлетворяется любым значением t, а, значит, система (1), (2) имеет бесконечное множество решений. Следовательно, условия (6) являются необходимыми и достаточными для того, чтобы прямая d принадлежала плоскости II.
В прямоугольной системе координат они означают, то что 
Из соотношений (5), (6) заключаем, что

§15. Взаимное расположение двух прямых
в пространстве
Пусть имеем две прямые  ,
,  каждая из которых задана точкой и направляющим вектором с координатами:
каждая из которых задана точкой и направляющим вектором с координатами:
 ,
, 
относительно аффинной системы координат .
|
Обозначим:
 ,
,
 ,
, 
1) Векторы - некомпланарны <=> rangA=3, значит detA ¹0. Следовательно, прямые
- некомпланарны <=> rangA=3, значит detA ¹0. Следовательно, прямые  и
и  скрещиваются.
скрещиваются.
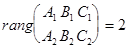
2) Векторы - компланарны  rangA=2, т.е. det À = 0. Следовательно, прямые и лежат в одной плоскости.
rangA=2, т.е. det À = 0. Следовательно, прямые и лежат в одной плоскости.
а) векторы  - неколлинеарны rangB = 2. Тогда прямые и пересекаются.
- неколлинеарны rangB = 2. Тогда прямые и пересекаются.
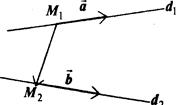
б) векторы и  - коллинеарны,
- коллинеарны,  и - неколлинеарны rangB = 1, rangC = 2. При этом прямые и параллельны.
и - неколлинеарны rangB = 1, rangC = 2. При этом прямые и параллельны.
3) Векторы коллинеарны rangB = 1, rangC =1 rangА = 1. Следовательно, прямые и совпадают.
Дата добавления: 2020-10-25; просмотров: 178;
Поиск по сайту
Узнать еще
- II. Бесполые способы размножения.
- III. Способы формирования фонда капитального ремонта
- А — рентгенограмма в прямой проекции; б — рентгенограмма после заполнения толстой кишки контрастной массой: стрелками указаны грыжевые ворота.
- А) Способы изображения пространственного строения энантиомеров
- Аварийный прямой парус
- Административно - правовой и гражданско-правовой способы
- Алгоритм решения прямой задачи динамики при установившемся режиме движения машины.
- Анализ движения денежных потоков на предприятии (прямой метод), руб.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
