Передаточное отношение зубчатой передачи
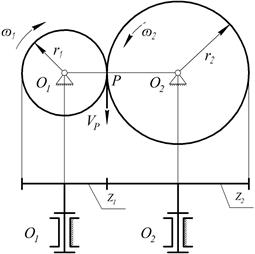
Рассмотрим две схемы зубчатых передач (рис.1). Передаточным отношением называется отношение угловой скорости ведущего вала к угловой скорости ведомого вала. Пусть ведущим будет вал О1. Тогда для обеих схем на рис.1 получим:
u12 =  1/ 2
1/ 2  (1.1)
(1.1)
а) б)
Рис.1
а – внешнее зацепление
б – внутреннее зацепление
Найдем скорость точки Р:
Vp= 1r1= 2r2 (1.2)
Или
 1/ 2 =
1/ 2 =  z2 / z1 (1.3)
z2 / z1 (1.3)
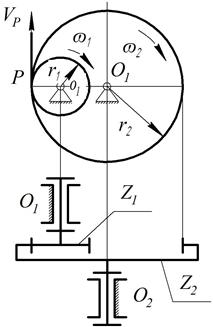
Знак минус соответствует внешнему зацеплению (рис.1-а), знак плюс — внутреннему зацеплению (рис. 1-б). Так как r1 = 0,5mz1 и r2= 0,5mz2, где m -модуль колес, то передаточное отношение можно выразить через числа зубьев колес:
u12= z2/z1 (1.4)
8.2.Кинематика рядовых передач
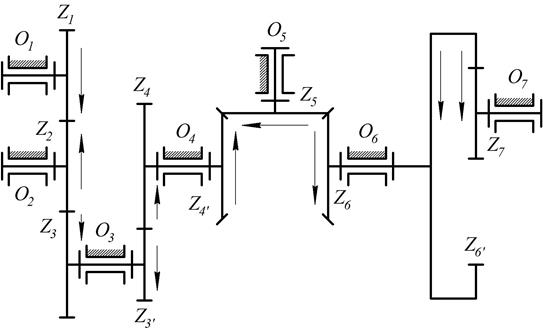
Рис.2 Рядовая зубчатая передача
Рассмотрим рис.2,на котором изображена рядовая зубчатая передача. Рассчитаем степень подвижности передачи, используя формулу Чебышева П.Л.:
W=3n-2р5-р4 (2.1)
где n - число подвижных звеньев; р5 - число кинематических пар пятого класса; р4 - число кинематических пар четвертого класса. Учитывая, что число подвижных звеньев в зубчатых передачах равно числу пар пятого класса, упростим эту формулу:
W=n - р4 (2.2)
В рассматриваемой передаче семь подвижных звеньев и шесть пар четвертого класса. Поэтому подвижность
W=7-6= 1
Зададимся угловой скоростью 1 первого звена. Целью кинематического расчета является нахождение передаточных отношений от первого звена ко всем звеньям передачи. Передача содержит шесть ступеней. Найдем передаточное отношение каждой ступени:
u12 = 1/ 2 ; u23 = 2/ 3 ; u34 = 3/ 4
u45 = 4/ 5 ; u56 = 5/ 6 ; u67 = 6/ 7
Теперь перемножим эти передаточные отношения:
u12  u23 u34 u45
u23 u34 u45  u56 u67 =
u56 u67 =
= 1/ 2 2/ 3 3/ 4 4/ 5 5/ 6 6/ 7 = u17 (2.3)
Следовательно, передаточное отношение рядовой передачи равно произведению передаточных отношений отдельных ее ступеней.
Определим знак передаточного отношения. Для этого выразим передаточное отношение каждой ступени через числа зубьев колес:
u12 = - z2 / z1 ; u23 = - z3 / z2 ; u34 = - z4 / z3’ ;
u45 = z5 / z4’ ; u56 = z6/ z5 ; u67 = - z7 / z6 ;
Для передаточных отношений u45, u56 знаки не учитываем, т. к. векторы угловых скоростей валов четвертого и пятою, пятого и шестого не параллельны, их нельзя сравнивать по знаку. Здесь удобно применять правило стрелок, которое заключается в следующем. Наносим стрелку произвольно на ведущем колесе z1. Для внешнего зацепления стрелки должны встречаться одноименными элементами (начало или конец), для внутреннего зацепления — разноименными элементами.
По этим стрелкам видно, что передаточное отношение u13 имеет знак плюс, отношение u17 тоже положительно.
Найдем передаточное отношение u17, выраженное через числа зубьев:
u17 = u14 u4’6 u67
Где u14 = u12 u23 u3’4 = (- z2 / z1) (- z3 / z2) (- z4 / z3’)
u 4’6 = - ( z5 / z4’) ( z6 / z5) ; U6’7 = z7 / z6’ ;
Числа зубьев колес z2 и z5 сокращаются, такие колеса называются паразитными, они не влияют на величину передаточного отношения, а изменяют только его знак. Блоки z3, z3, z4, z4, z6, z6 называются кратными, поэтому вся передача будет с кратным зацеплением. Окончательно для U17получим:
u17=(z3 z4 z6 z7)/(z1 z3’ z4’ z6’) (2.5)
Если требуется найти передаточное отношение от седьмого колеса к первому в выражении (2.5) следует поменять местами числитель и знаменатель:
u71=(z1 z3’ z4’ z6’)/(z3 z4 z6 z7) (2.6)
8.3. Кинематика планетарных передач
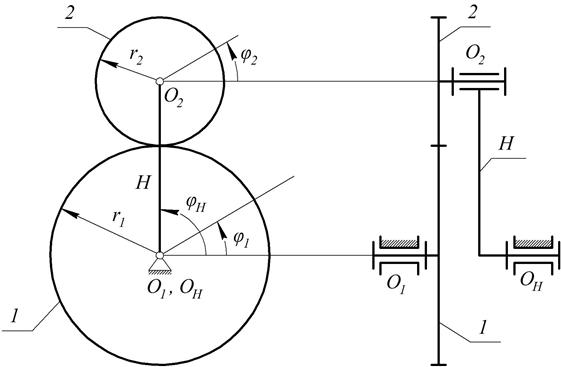
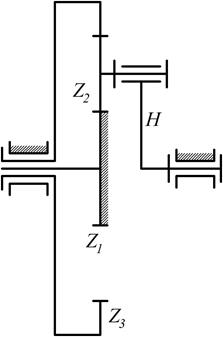
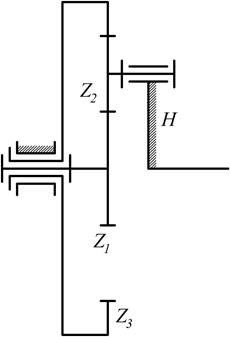
Рис.3 Дифференциальная передача.
Рассмотрим передачу, изображённую на рис.З.
Звено 1 называется центральным колесом, звено 2 - сателлитом, звено Н - водилом. Передача содержит три звена и одну пару четвёртого класса. По формуле (2.2) получим:
W=n - Р = 3- 1=2
Такая передача называется дифференциальной, так как в ней можно вычитать или складывать движения двух звеньев. Термин «планетарная» передача используется потому, что движение сателлита напоминает движение планет солнечной системы.
С центральным колесом и сателлитом жёстко свяжем отрезки, при помощи которых зададим углы  1, 2.Углы 1, Н будут обобщёнными координатами, угол 2- функция положения сателлита. Для этого угла можно записать:
1, 2.Углы 1, Н будут обобщёнными координатами, угол 2- функция положения сателлита. Для этого угла можно записать:
2 = 2 ( 1, Н) (3.1)
Дифференцируем эту функцию по времени:
 2 = (
2 = (  2/ 1) 1 + ( 2/ Н) Н (3.2)
2/ 1) 1 + ( 2/ Н) Н (3.2)
Величины 1 = 1 ; Н = Н – это обобщённые скорости, они должны быть заданными.
Величина 2 = 2 - угловая скорость сателлита, она является искомой.
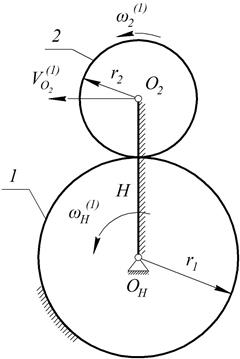
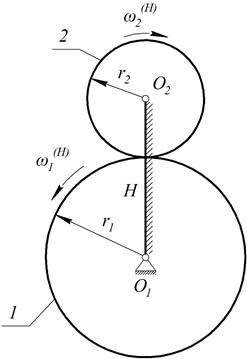
Найдем частную производную 2/ 1. При этом обобщенная координата Н
должна быть постоянной, т.е. водило окажется остановленным (рис. 4-а).
 а) б)
а) б)
Рис. 4. Обращенные механизмы.
а – при остановке вала;
б – при остановке колеса 1.
Передаточное отношение
u21(н) = 2(н)/ 1(н) = -r1/ r2 (3.3)
Какими будут угловые скорости колес после остановки водила, выясним позже, а сейчас найдем вторую частную производную 2/ Н. Обобщенная координата 1 будет постоянной и колесо 1 окажется остановленным (рис. 4-б). Линейная скорость центра сателлита будет равной:
VО2(1)= Н(1)( r1+r2) = 2(1) r2 (3.4)
Передаточное отношение
u2Н(1) = 2(1)/ Н(1) = ( r1+r2)/ r2 = - u21(Н)+1 (3.5)
С учетом полученного выражения найдем из (3.2) угловую скорость сателлита:
2 = u21(Н) 1 + (1- u21(Н)) Н (3.6)
или
2 - Н = u21(Н) ( 1 - Н) (3.7)
Далее
u21(Н)=( 2- Н)/( 1- Н) (3.8)
Сравнивая выражения (3.3) и (3.8), получим
1(Н) = 1 - Н ; 2(Н) = 2 - Н
После остановки водила получаем механизм, который называется обращенным. В обращенном механизме из угловых скоростей колес нужно вычитать угловую скорость водила. Выражение (3.8) называется формулой Виллиса, имеющей большое значение в кинематике планетарных передач.
Рассмотрим ряд примеров:
Пример 1.
А) б)
В) г)
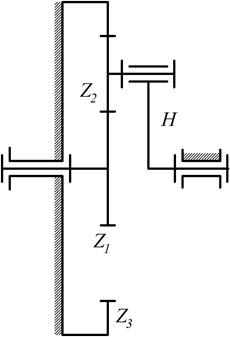
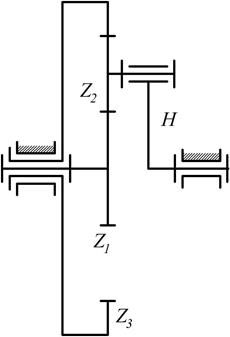
Рис. 5. Редуктор Джеймса
а, в – исходные механизмы
б, г – обращенные механизмы
На рис. 5 приведена схема простого планетарного редуктора Джемса в двух вариантах. В первом варианте (рис. 5-а) центральное колесо 1 неподвижно, во втором варианте (рис. 5-в) неподвижным является центральное колесо 3. Подвижность механизмов, изображенных на рис. 5, равна единице:
W=n-р4=3-2= 1
В исходных механизмах (рис. 5-а, в) входным звеном может быть либо центральное колесо, либо водило. Обращенные механизмы представляют собой обыкновенные рядовые передачи с паразитным колесом 2. Найдем сначала передаточное отношение обращенного механизма:
u31(Н) = ( z2 / z3) (- z1 / z2) = - z1 / z3 ;
u13(Н) = (-z2 / z1) (z3 / z2) = - z3 / z1
Используем формулу Виллиса для схемы на рис. 5-а:
u 31(Н) = ( 3 - Н)/ ( 1 - Н) = u3Н + 1 (3.9)
Отсюда
u3Н = 1- u31(Н) = 1- (- z1 / z3)= 1 + ( z1 / z3) (3.10)
Аналогично длясхемы на рис. 5-в:
u13(Н) = ( 1 - Н)/ ( 3 - Н) = u1Н + 1 (3.11)
Или
u1Н=1- u13(Н) = 1- (- z3 / z1) = 1 + z3 / z1 (3.12)
Исследуем допустимые пределы изменения передаточных отношений для обеих схем. Положим, что z1= z2. Тогда z3= z1+ 2z2, т.к. все колеса одного модуля. По формуле (3.10) получим:
u3Н = 1 + z1 / z3 = 1 + z1 / 3z1 = 4/3 ; uН3 = 3/4 ;
При ведущем водиле угловая скорость 3 = (4/3) Н . При ведущем колесе 3 угловая скорость Н = (3/4) 3. В первом случае получается повышающая
передача (мультипликатор). Во втором случае получается понижающая передача (редуктор). В обоих случаях передаточное отношение мало отличается от единицы. По формуле (3.12) найдем:
u1Н = 1 + z3 / z1 = 1 + 3z1 / z1 = 4 ; u1Н = 1/4 ;
При ведущем водиле угловая скорость 1 = 4 Н - повышающая передача. При ведущем колесе 1 угловая скорость водила Н = 0,25 1 - понижающая передача. Здесь достигается значительно больший кинематический эффект по сравнению с передачей на рис. 5-а.
Возьмем возможно большее соотношение чисел зубьев колес. Для одной ступени рядовой зубчатой передачи не рекомендуется назначать передаточное отношение больше пяти.
Выберем z5= 5z1, тогда z3 = z1 + 10z1 = 11z1
По формуле (3.10):
u 3Н = 1 + z1 / z3 = 1 + z1 / 11z1 = 12/11 ; uН3 = 11/12
По формуле (3.12):
u1Н = 1 + z3 / z1 = 1 + 11z1 / z1 = 12 ; uН1 = 1/12
Для схемы на рис. 5-а передаточное отношение опять мало отличается от единицы. Для схемы на рис. 5-в при ведущем водиле 1 = 12 Н повышающая передача. При ведущем колесе 1 угловая скорость водила Н = 1/12 1 - понижающая передача.
Наконец, рассмотрим соотношение чисел зубьев z1 = 5z2, тогда z3 = 7/5z1 ;
По формуле (3.10):
u3Н = 1 + z1 / z3 = 1 + 5z1 / 7z1 = 12/7 ; uН3 = 7/12
По формуле(3.12):
u1Н = 1 + z3 / z1 = 1 + 7z1 / 5z1 = 12/5 ; uН1 = 5/12
Таким образом, кинематические свойства передач получены следующие. Для схемы на рис. 5-а при ведущем водиле угловая скорость центрального колеса изменяется в пределах 3 =(12/11…12/7) Н ;
при ведущем колесе 3 угловая скорость водила  Н =(11/12…7/12) 3
Н =(11/12…7/12) 3
Для схемы на рис. 5-в при ведущем водиле угловая скорость колеса 1: 1 =(12/5…12) Н;
при ведущем колесе 1 угловая скорость водила Н =(1/12…5/12) 1
Из-за низкой кинематической эффективности передача с неподвижным колесом 1 не находит применения в машиностроении. Передача с неподвижным колесом 3 получила широкое распространение и может работать как повышающая, так и понижающая.
Пусть задана схема редуктора (рис.6), в котором водило Н редуктора Джемса приводится от рядовой ступени (колеса 1, 2).
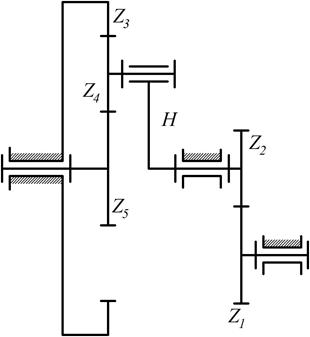
Рис.6. Двухступенчатый редуктор с простой и планетарной ступенями.
Рассчитать передаточное отношение u15, если z1= z4=30; z2= z5=20; z3=80, а также найти число оборотов колеса 5 и сателлита 4 при n1 =50 об/мин.
Решение. 1) подсчитываем передаточные отношения отдельных ступеней. Для первой ступени
u12= n1/ n2= - z2/ z1 = -20/30 = -2/3, откуда
n2 = - (3/2) n1 = - (3/2) 50 = -75 об/мин.
Так как n2= nН, то nН = -75 об/мин.
Для второй ступени
uН5 = nН/ n5 = 1/u5Н = 1/(1- u53Н) = 1/(1-(- z4/ z5)( z3/ z4)) =
=1/(1+ z3/ z5) = 1/(1+80/20) = 1/5;
2) Общее передаточное отношение редуктора
u15= u1Н uН5 = (-2/3) (1/5) = -2/15 = n1/ n5 об/мин.
Или
n5 = -7,5 n1 = -7,5 50 = -375 об/мин.
3) Найдем число оборотов сателлита. Для этого воспользуемся формулой Виллиса:
u54Н = (n5 – nН)/ (n4 – nН) = - z4/ z5 = - 30/20 = -3/2,
или
n5- nН = (-3/2 n4)+(3/2 nН)
откуда
n4 = (-2/3 n5)+(5/3 nН)=(-2/3 (-375)) + (5/3 (-75)) = =125об/мин.
Сателлит вращается в ту же сторону, что и колесо 1.
Можно поступить и так:
u 34Н = (n3 – nН)/ (n4 – nН) = z4/ z3 = 30/80 = 3/8;
Далее -nН = ((3/8) n4) – ((3/8) nН)
Или n4 = -(5/3) nН = -5/3(-75)=125 об/мин.
Сателлит вращается в ту же сторону, что и колесо 1.
Можно поступить и так:
u34H = (n3 – nH)/(n4 – nH) = z4/z3 = 30/80 = 3/8;
Далее -n = (3/8)n4 - (3/8)nH;
Или n4 = -(5/3)nH = -5/3(-75) =125 об/мин.
Получили тот же результат.
Пример 2. На рис. 7 изображена схема редуктора с двумя внешними зацеплениями. Подвижность механизма:
W = n-р4 =3-2 = 1
Пусть задана угловая скорость водила Н. Требуется определить угловую скорость 1 ведомого звена. Сначала выразим эти соотношения через радиусы колес. Мгновенная ось вращения обозначена ММ. Найдем скорость точки А:
VA = (r3 + r2’) Н = 2 r2’
Или
2=(r3/r2’ + 1) Н (3.14)
Блок сателлитов z2, z2’вращается как одно целое. Поэтому скорость точки С
VС = 2 СМ (3.15)
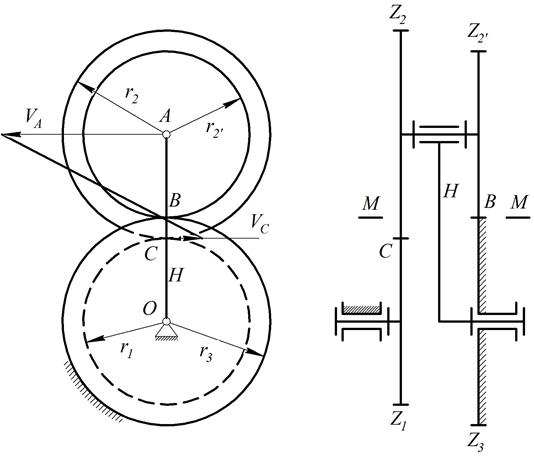
Рис. 7. Редуктор Давида с внешнем зацеплением
Рис. 7 Редуктор Давида с внешним зацеплением
Скорость точки С является окружной для колеса 1, тогда для угловой скорости этого колеса получим
1 = VС/ r1 (3.16)
Расстояние точки С до мгновенной оси равно
СМ = r2 + r2’ (3.17)
С учетом написанных выражений получим
1 = (((r3/ r2’ + 1) ( r2 - r2’)) Н)/ r1(3.18)
Из этой формулы видно, что чем ближе точка С к мгновенной оси, тем меньше передаточное отношение и1Н и тем больше отношение uН1. Особенно наглядно это проявляется в профильной проекции на рис. 7. В рассматриваемом случае колесо 1 вращается противоположно водилу. Если точка С окажется выше точки В, то направления угловых скоростей водила и колеса 1 будут совпадать. Если же точка С совпадет с точкой В, то r2 - r2* = 0, колесо 1 окажется неподвижным.
Выражение передаточного отношения через радиусы колес не всегда удобно, так как колеса z2, z2’ могут быть разного модуля. Используя формулу Виллиса, выразим передаточное отношение через числа зубьев колес:
u 13Н = ( 1 - Н)/ ( 3 - Н) = u 1Н + 1 = (-z2 / z1) (-z3 / z2’) (3.19)
Или
u 1Н = 1- (z2 / z1) (-z3 / z2’) (3.20)
Для уменьшения u 1Н необходимо, чтобы передаточное отношение обращенного механизма u 13(Н) было положительным и как можно ближе к единице.
Пусть задано: z1 = 101; z2=100; z2’ = 99; z3 = 100;
По формуле (3.20)
u 1Н = 1- (z2 / z1) (-z3 / z2’) = - (100 100)/(101 99) = - 1/9999  - 1/10000
- 1/10000
Этот случай соответствует рис. 7, где гочка С лежит ниже мгновенной оси. Задана другие значения чисел зубьев:
z1 = 100; z2=101; z2’ = 100; z3 = 99;
Тогда
u 1Н = 1- (z2 / z1) (-z3 / z2’) = 1 - (101 99)/(100 100) = 1/1000
В этом случае точка С лежит выше мгновенной оси, водило и колесо 1 вращаются в одну сторону.
Недостатком этого механизма являются большие потери на трение, следовательно низкий коэффициент полезного действия. При u Н1=10000к. п. д. равен 0,0015.
 Пример 3.
Пример 3.
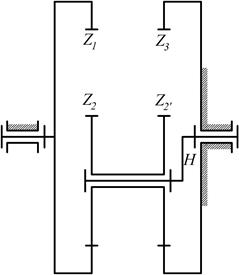
Рис. 8. Редуктор Давида с двумя внутренними зацеплениями.
На рис. 8изображен редуктор Давида с двумя внутренними зацеплениями. Здесь получается более компактная конструкция, чем на рис.7.
Зададим числа зубьев: z1 = 100; z2=99; z2’ = 100; z3 = 101
Передаточное отношение считается по той же формуле (3.20)
u 1Н = 1- (z2 / z1) (-z3 / z2’) = - (99 101)/(100 100) = 1/1000
Коэффициент полезного действия этого редуктора тоже низкий. При u Н1=10000он равен 0,04.
Дата добавления: 2020-07-18; просмотров: 1133;
Поиск по сайту
Узнать еще
- A — отношение сигнал/помеха.
- II. Механические передачи
- R-плазмиды, функции, строение. Пути передачи. Механизм множественной лекарственной устойчивости.
- Z-преобразование синусной компоненты выходного сигнала связано с Z-преобразованием входного сигнала следующим соотношением
- Автоматика разгрузки при статической перегрузке электропередачи
- Аппаратная реализация способов передачи данных
- Асинхронная и синхронная передачи
- Бережное отношение к процессу и результату творчества.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
