Классификация кинематических пар
1. В зависимости от числа Н различают одно-, двух-, трех-, четырех-, и пятиподвижные кинематические пары. Число уравнений связей принимают за номер класса.
2. По характеру соприкосновения элементов звеньев (точнее виду элементов) пары делят на низшие и высшие (предложение Ф. Рело). К низшим относят кинематические пары, элементами которых являются поверхности (рис 1.2). Элементами высших пар являются линии или точки (рис 1.2).
3. По характеру сопряжения различают кинематические пары с силовым замыканием (соприкосновение звеньев обеспечивается действием какой - либо силы, например, веса или пружины) и кинематическим (постоянный контакт звеньев достигается за счет конструктивной формы элементов).
4. В зависимости от характера относительного движения звеньев кинематические пары подразделяют на поступательные, вращательные, винтовые, цилиндрические, сферические, плоскостные.
На рис. 1.1 изображены одноподвижные пары (кинематические пары V класса) рассмотрим их подробнее.
| |||||
| |||||
| |||||
|
Пара одноподвижная:
1) Вращательная (рис. 1.1. а) – цилиндрический шарнир. Наложено пять условий связи: исключены все движения, кроме вращательного.
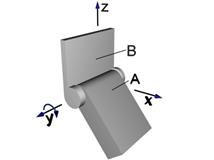
2) Поступательная (рис. 1.1. б) – наложено пять условий связи: исключены все движения, кроме одного поступательного.
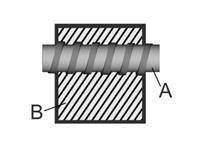
3) Винтовая (рис. 1.1. в) – наложено пять условии связи: исключены все движения, кроме поступательного. (Вращение не вносит степени свободы, т.к. в данном случае поступательное и вращательное движения не независимы).
На рис. 1.2 изображены пары двух-, трех-, четырех-, и пятиподвижные (кинематические пары IV, III, II и I классов) рассмотрим их подробнее.
|
|
| ||||||
| ||||||||
|
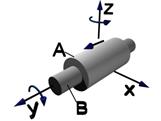
Пара двуподвижная (рис. 1.2.а) - втулка на валике. Наложено четыре условия связи, исключены поступательные и вращательные движения вдоль осей ОХ и ОZ.
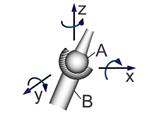
Пара трехподвижная (рис. 1.2.б) - шаровой цилиндр. Наложено три условия связи: исключены поступательные движения вдоль всех трёх осей.
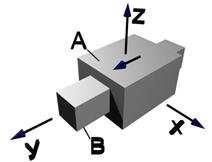
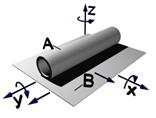
Пара четырехподвижная (рис. 1.2.в)- цилиндр на плоскости. Наложено два условия связи: исключено поступательное движение вдоль оси OZ и вращательное вокруг оси OX.
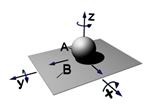
Пара пятиподвижная (рис. 1.2.г) - шар на плоскости. Наложено одно условие связи: исключено поступательное движение вдоль оси OZ.
Дата добавления: 2020-02-05; просмотров: 262;
Поиск по сайту
Узнать еще
- B. Департаменты и управления функционального характера.
- II Классификация САSЕ-средств
- II. Классификация документов
- II. Психологические приемы влияния на партнера.
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- III. Взаимосвязь потребления, сбережений и инвестиций. Парадокс бережливости.
- III. Классификация методов воспитания.
- III.1.3. ПРИЧИНЫ НАРУШЕНИЙ СЛУХА. ПСИХОЛОГО-ПЕДАГОГИЧЕСКАЯ КЛАССИФИКАЦИЯ НАРУШЕНИЙ СЛУХОВОЙ ФУНКЦИИ У ДЕТЕЙ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
