Процедура регулировки на примере механизма РЗГ
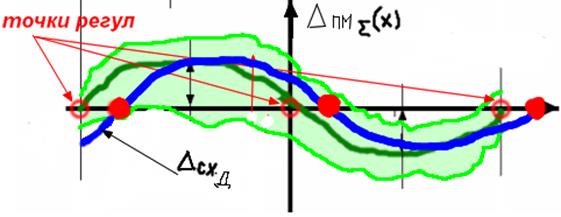
1. Задать перемещения входного звена, соответствующие значениям точек регулировки 
2. Сравнить положения выходного звена (указателя) с отметками на шкале, соответствующим середине и краям диапазона ± Dx/2.
3. Определить несоответствия (погрешности регулировки ПМ) и определить источник погрешности и выполнить регулировку.
Пример. Для Dx = 0.1 мм(±0,05) и регулировки по краям.
Для «эталонных» перемещений х применяем концевые меры длины (КМД) и блоки КМД с размерами х1=10, х2= 10,05, х3=10,1мм.
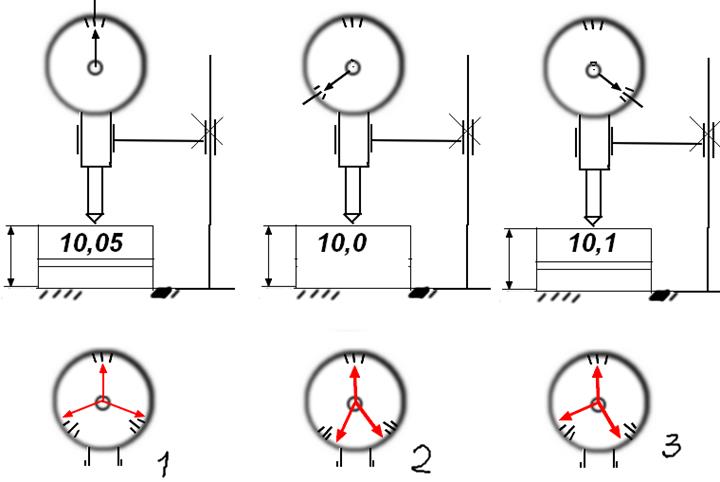
1) чувствительность Кд < К ном
2) чувствительность Кд > К ном
3) чувствительность Кд @ К ном, положение точек регулировки смещены в «плюс».
4) и т.п.
ЧАСТЬ 4. Рычажные передаточные механизмы .
Назначение: преобразование движений, (поступ-вращ, вращ-вращ, поступ-вращ и т.п.).
Достоинства РПМ:
- простота структуры ПМ - минимальное количество звеньев,
- простота конструкции контактирующих элементов РМ с высшими КП (сфера - плоскость, цилиндр-цилиндр);
– высокая точность изготовления.
Недостатки РПМ:
- схемная (теор.) нелинейность ФП;
- ограниченный диапазон движений (Dx и Dy).
- силовые РПМ – проблемы с КП (высшие КП работают с низкими нагрузками, конструкция низших Кинематических Пар менее точная и сложная).
Дата добавления: 2022-05-27; просмотров: 85;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
