Основная теорема статики (т. Пуассона)
Статика. Механические колебания
I. Статика
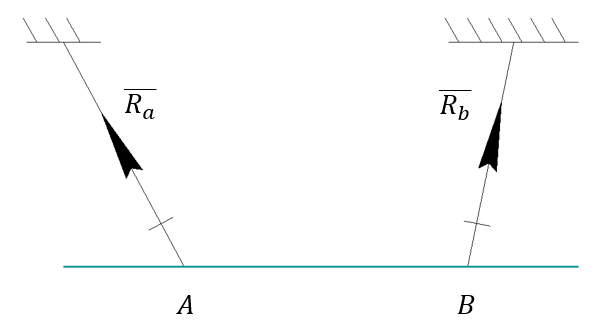
1) Гладкая поверхность
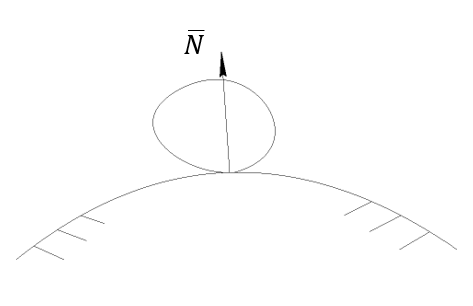 
|
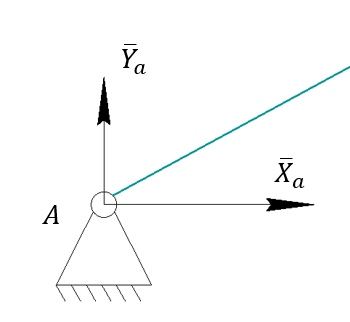
3) Цилиндрический (плоский)
шарнир
|
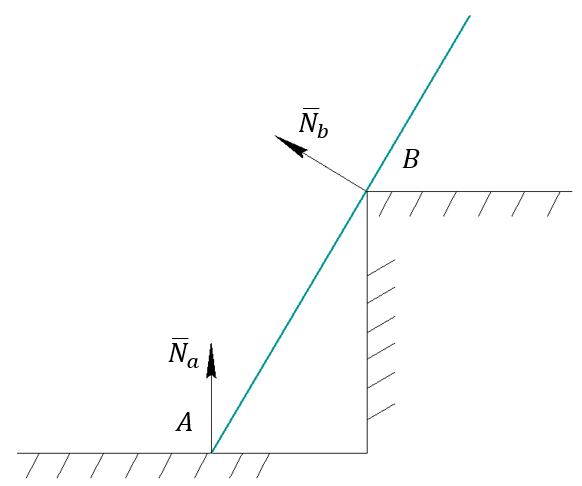
2) Каток
|
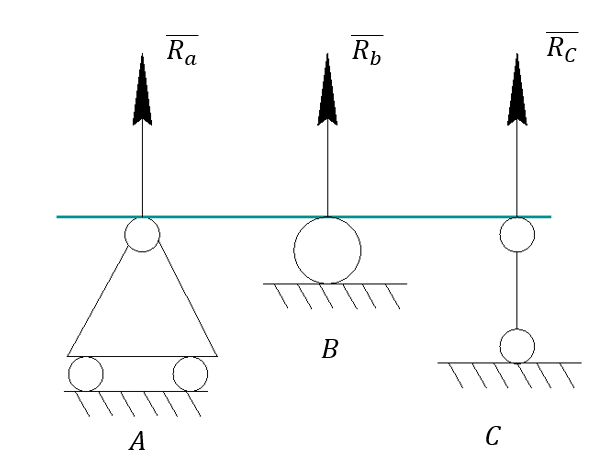
5) Нерастяжимая нить
|
4) Невесомый ненагруженный шарнир, закрепленный в стержень
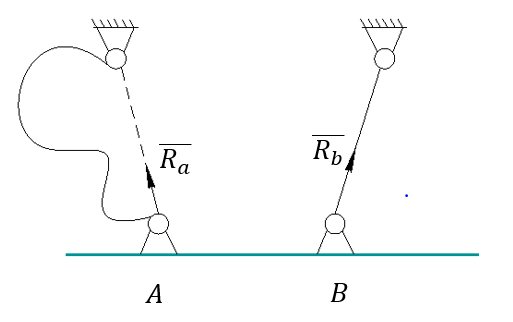
|
7) Скользящий шарнир
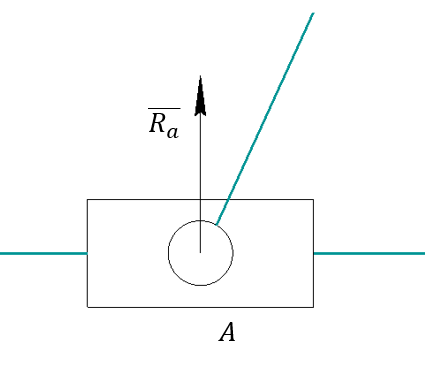
|
6) Закрепление типа подшипник-подпятник
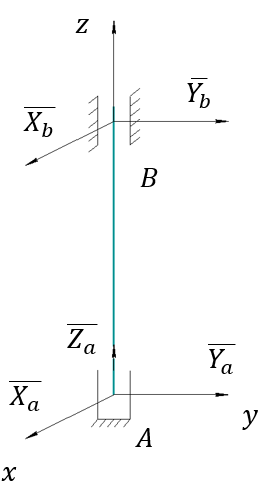
|
Основная теорема статики (т. Пуассона)
 произвольную систему сил, действующей на твердое тело можно привести к силе, численно равной главному вектору системы сил и паре сил (моменту), векторный момент которой равен главному моменту системы сил, относительно точки, выбранной за центр приведения.
произвольную систему сил, действующей на твердое тело можно привести к силе, численно равной главному вектору системы сил и паре сил (моменту), векторный момент которой равен главному моменту системы сил, относительно точки, выбранной за центр приведения.
Условия равновесия системы сил

Для равновесия системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы главный вектор системы сил и главный момент относительно произвольного полюса были равны нулю.
Условия равновесия механической системы
В замкнутой систему полная энергия остается постоянной, поэтому кинетическая энергия может возрастать только за счет уменьшения потенциальной энергии. Если система находиться в таком состоянии, что скорости всех тел равны нулю, а потенциальная энергия имеет минимальное значение, то без воздействия извне тела системы не могут прийти в движение, т.е. система будет находиться в состоянии равновесия.
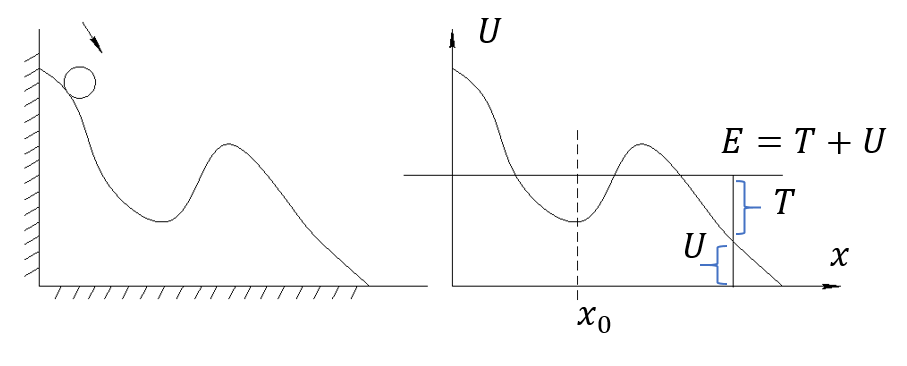
Шарик катиться без трения по горке
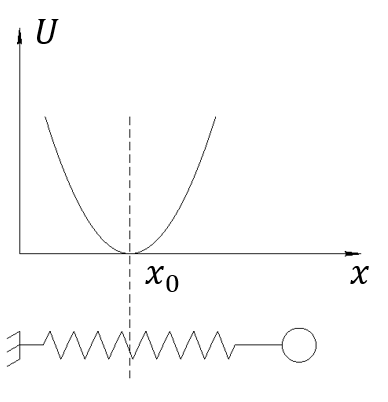
X0 – точка минимальной U – возможного равновесия
II. 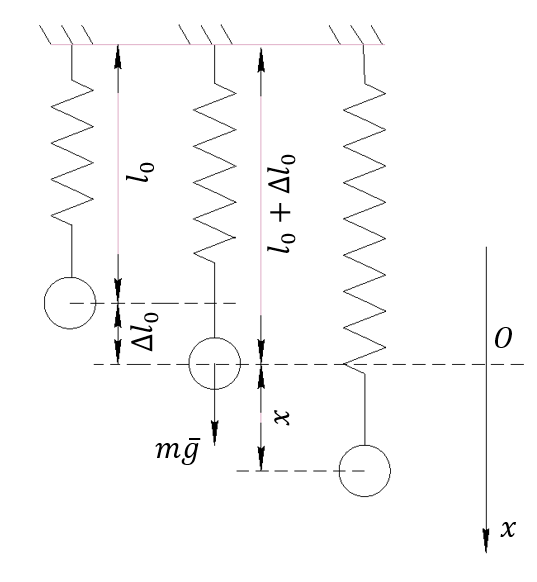 Механические колебания
Механические колебания
Гармонические колебания
Рассмотрим систему из шарика массой m, подвешенного на пружине. В состоянии равновесия сила тяжести и упругости уравновешивают друг друга:

Определим результирующую силу, действующую на шарик:

Уравнение второго закона Ньютона для шарика имеет вид:

Произведем замену  :
:  – дифференциальное уравнение гармонических колебаний
– дифференциальное уравнение гармонических колебаний
Решение: 
Причем


Период – время, за которое фаза колебаний получает приращение 




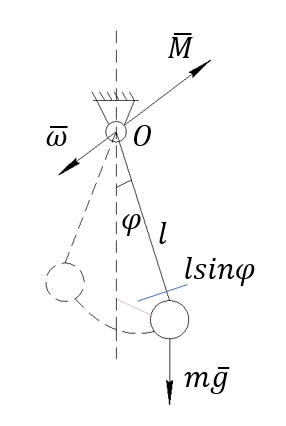 Математический маятник – колебательная система, в которой масса, сосредоточенная в одной точке, подвешена на невесомой и нерастяжимой нити.
Математический маятник – колебательная система, в которой масса, сосредоточенная в одной точке, подвешена на невесомой и нерастяжимой нити.
 (“-“ – момент стремится вернуть систему в положение равновесия)
(“-“ – момент стремится вернуть систему в положение равновесия)




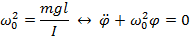
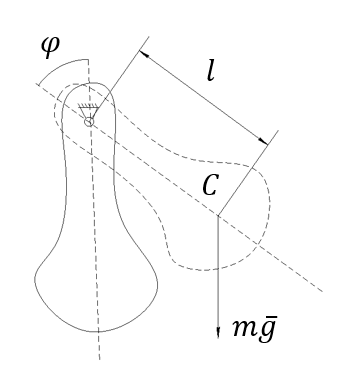 Физический маятник – твердое тело, способное совершать колебания относительно неподвижной оси.
Физический маятник – твердое тело, способное совершать колебания относительно неподвижной оси.



Сопоставим выражения для периода математического и физического маятника, маятник с длинной  будет иметь такой же период колебаний, как и данный физический маятник. Называют приведенной длинной.
будет иметь такой же период колебаний, как и данный физический маятник. Называют приведенной длинной.
Теоретический минимум:
1) Основные виды связей и их реакции
2) Условия равновесия системы сил
3) Условие равновесия механической системы
4) Определение свободных, гармонических, вынужденных и затухающих колебаний
5) Дифференциальное уравнения гармонических колебаний для пружинного маятника, его решение, скорость, ускорение, период, частота, амплитуда и начальная фаза колебания.
6) -//- для математического маятника
7) Определения математического и физического маятника
8) Приведенная длина
9) Резонанс, график A(ω)
10) Энергия гармонических колебаний пружинного и математического маятника в любой момент времени и определение по начальным условиям
| <== предыдущая лекция | | | следующая лекция ==> |
| ТЕКСТОВЫЙ ПРОЦЕССОР MS WORD 2007 | | | Краткая характеристика Донецкого угольного бассейна |
Дата добавления: 2021-10-28; просмотров: 130;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
